


Je lis ce forum depuis 1 semaine et je me décide à me présenter.
Je travaille dans une ESN sur des projets de développement d'appli...
En parallèle je m’intéresse depuis 1 an à la robotique. Avant ça j'avais commencé un autre projet avec un microcontrôleur Atmel ATtiny. Du coup je suis parti de là pour essayer de commander un premier servomoteur.
Ensuite il m'est venu l'idée saugrenu de tenter de faire un robot "humanoïde" avec 6 petits servomoteurs 9g et des lego duplo.

J'ai programmé un semblant de mouvement de marche en coordonnant ces 6 servos mais vu leurs faibles puissances, le robot s'est effondré dès que je l'ai posé au sol.
J'ai retenté l'expérience avec des servos beaucoup plus puissants (Blue Bird BMS-620MG) et pour les fixations, des équerres (en zinc) pour meubles.
Cette fois le robot était beaucoup trop lourd et ces servos ne gardent pas leur position à moins de les maintenir constamment sous tension en leur demandant de maintenir un angle. J'ai fini par en griller la moitié.
Finalement le troisième essai a fonctionné. 6 servos SpringRC SR-402P et des fixations en alu que j'ai usiné (j'ai trouvé des petites barres d'1m chez casto). Au passage j'ai changé de microcontrôleur pour un ATMega8 qui me permet de programmer les mouvements plus précisément (j'étais aux limites de la mémoire de mon ATTiny2313).
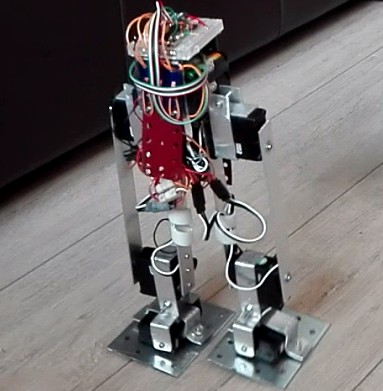
Le robot se déplace de façon stable et à une vitesse que je trouve satisfaisante.
Naturellement la démarche n'est pas fluide avec seulement 6 DOF mais je suis ravi d'avoir atteint ce premier objectif 
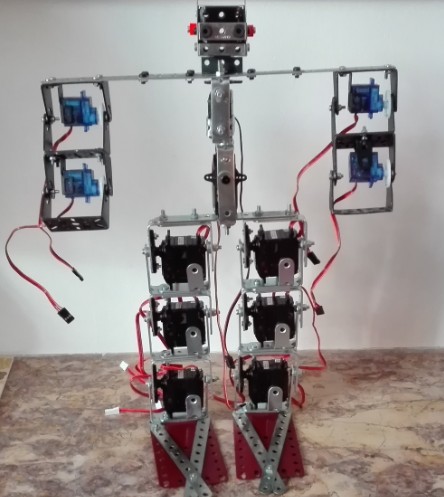
A présent je suis en train d'ajouter des bras en gardant une approche très minimaliste.
Mon prochain objectif, faire un petit combat pour le fun avec le robonova d'un des organisateurs pendant le tournoi de Nîmes en mai prochain.
@+











 bah oui, mais il n'a pas répondu encore....
bah oui, mais il n'a pas répondu encore.... 











