un peu comme la NASA avec ses rovers martiens !
C'est marrant, j'ai pensé la même chose quand j'ai téléchargé par wifi une mise à jour de l'odométrie ( arduino micro) alors que Pablo était à l'autre bout du jardin.

 1 note(s)
1 note(s)
Membre passionné


Posté 16 mai 2017 - 08:07
un peu comme la NASA avec ses rovers martiens !
C'est marrant, j'ai pensé la même chose quand j'ai téléchargé par wifi une mise à jour de l'odométrie ( arduino micro) alors que Pablo était à l'autre bout du jardin.
Membre passionné
Posté 17 mai 2017 - 05:27
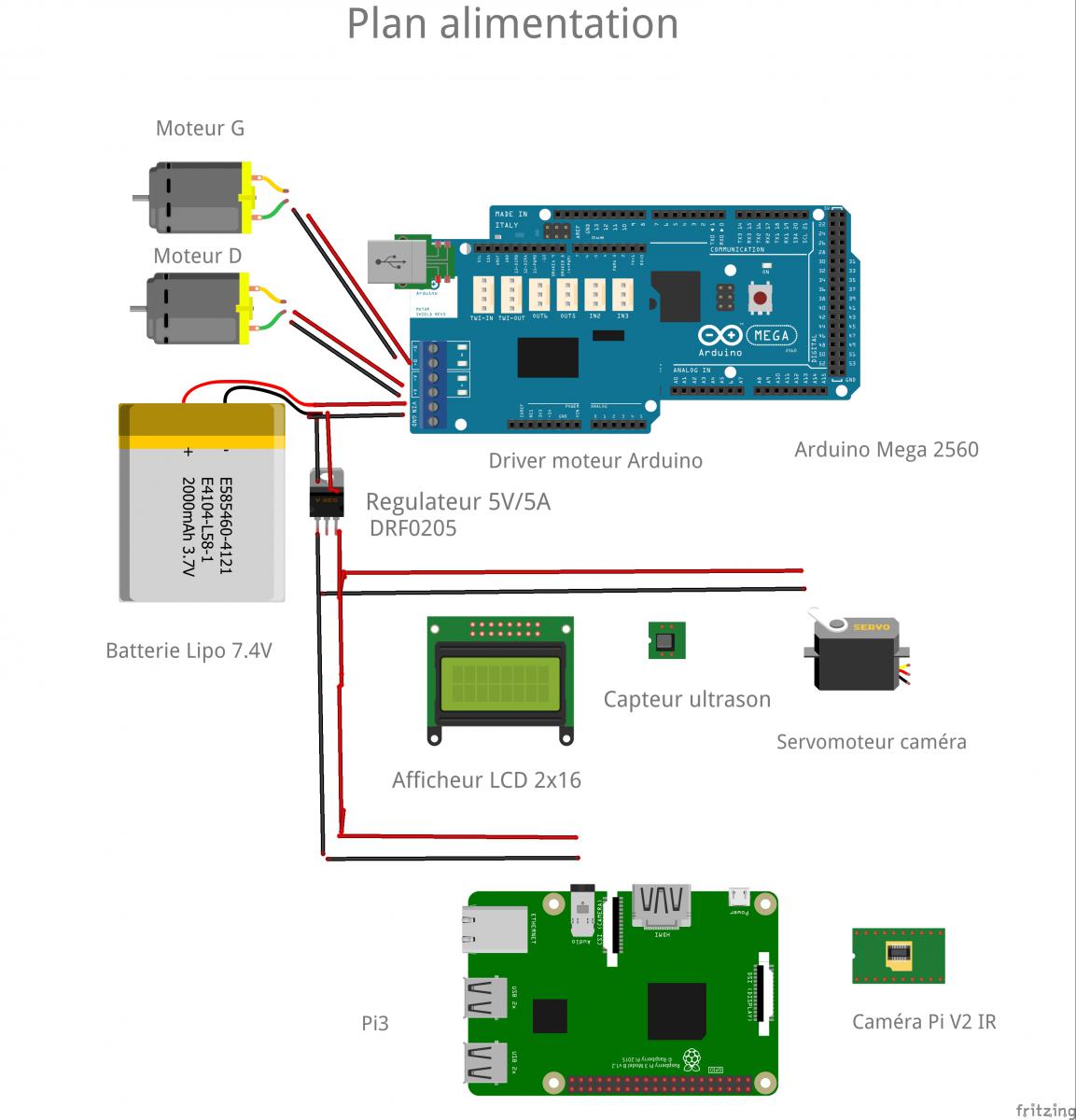
Mise à jour du plan alimentation pour :
- Remplacement batteries 4xAA par 1 Lipo 2S
- suppression besoin 3.3V ( Wifi PI3 au lieu de Wifi ESP8266 )
- prise en compte caméra PI V2 alimentée par le PI3
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Membre passionné
Posté 18 mai 2017 - 12:37
Pour le dimensionnement de la batterie Lipo 2S , c'est un peu approximatif car les datasheets ne sont pas forcément explicites.
Consommation du robot
Raspberry PI3 wifi + caméra PI V2 : 1000 ma
Arduino Mega2560+ Shield moteur : 400 ma
LCD 16x2 IC : 50 ma
2 x moteurs Polulu 994 : 600 ma
Soit une consommation d'environ 2000ma => Lipo 2S 2000 mah
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Membre passionné
Posté 18 mai 2017 - 10:51
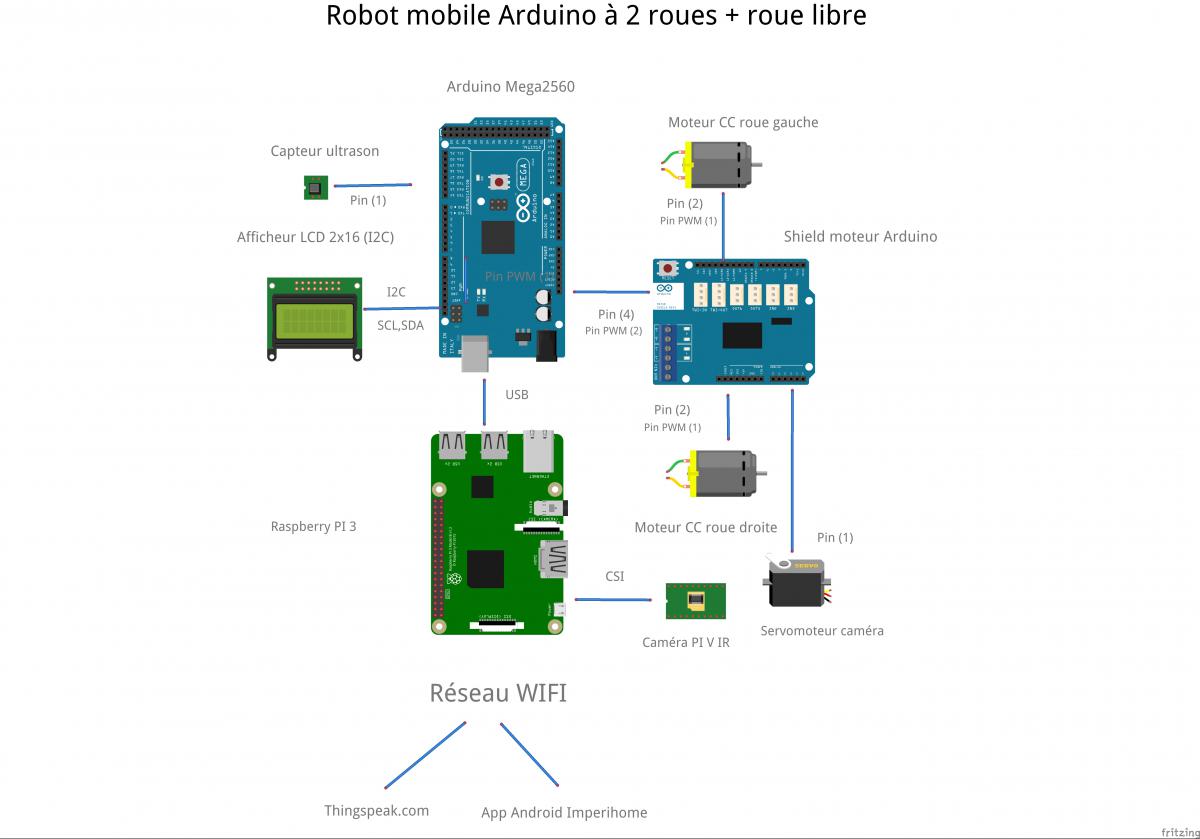
Mise à jour du plan architecture pour l'introduction du Raspberry PI3 comme module Wifi en remplacement de l'ESP8266 et remplacement de la caméra IP existante par la caméra PI V2 IR .
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Membre passionné
Posté 29 mai 2017 - 12:20
Avant d'aller plus loin , il faut refaire le chassis à base de profilés "Motédis" comme beaucoup de makers ou à base d'équerres ALU de Leroy Merlin , Casto ..
Je verrai cela lors de mes vacances en France dans quelques semaines , ainsi que la commande d'un Raspberry PI3 + Caméra PI V2 pour le téléverservement de sketch directement sur Arduino à partir du PI3.
Pour la batterie Lipo 2S , je vais trouver ca localement.
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Pilier du forum

Posté 29 mai 2017 - 06:09
Hum, une tite question comme ça, ta caméra PI, c'est celle qui a la vision infrarouge ?
Si c'est le cas, j'espère que tu ne souhaite pas avoir les vrais couleurs en plein jour, car tu vas avoir une surprise sur le rendu 
Après si bien la vision infrarouge que tu recherches (oublie ma question ).
Membre passionné
Posté 30 mai 2017 - 04:36
Oui @Oliver17 , c'est bien la vision infrarouge de la caméra PI V2 ( besoin vision nocturne en plus de la vision jour ) , avec l'option NoIR ( sans filtre infrarouge) , et donc avec l'inconvénient que tu as cité sur le rendu des couleurs durant le jour par rapport à la version standard.
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Pilier du forum
Posté 30 mai 2017 - 07:56
Ok, donc c'était volontaire, car perso, j'ai pris le même type de caméra mais sur le moment je n'avais pas fais gaffe sur le rendu que la cam aurait ^^
Bon ben nickel alors
Membre passionné
Posté 11 juin 2017 - 09:52
Comme un Raspberry 3 a été rajouté en plus de l'Arduino MEGA2560 dans l'architecture du robot , je vais en profiter pour m'affranchir de la liaison USB entre le PC et la carte Arduino du robot pour charger et tester le sketch du robot en utilisant la liaison Wifi entre le PC et le RPI .
Pour cela il faut :
1) connecter le RPI3 en Wifi avec le routeur ADSL
- fichier /etc/dhcpcd.conf
2) connecter le PC en mode VNC
- Activer VNCSERVER coté RPI3
- Installer un client VNC coté PC
3) Installer l'IDE Arduino sur le RPI
Ensuite il restera à mettre en place la communication entre le RPI3 et la carte Arduino Mega2560
Le screenshot vu du client VNC coté PC montrant l'IDE Arduino sur le RPI3 connecté en Wifi
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Made By Humans

Posté 11 juin 2017 - 10:27

Staff Robot Maker

Posté 11 juin 2017 - 12:58
Dans ce cas, je peux te passer un super tuto pour compiler et verser ton code dans l'arduino depuis le raspberry
Toujours quand même indiquer le lien vers le tuto en question plutôt que de laisser les gens attendre le prochain post ! 
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 11 juin 2017 - 01:16
@Mike & @Path,
Je vais utiliser ce tuto de path pour la connexion entre RPI3 et Arduino
Le programme de test "Arduino" vient d'etre téléversé par l'IDE du RPI3 vers la carte Arduino
Reste la partie programme de test coté RPI3 en Python
@Path ,
la connexion SSH entre le PC et le RPI 3 fonctionne avec Putty mais pour l'instant je préfère utiliser l'IDE Arduino sur le PI car en phase de développement du programme du robot
..... retour sur la finale de roland garros
EDIT : Suite création du programme de test coté RPI3 ( cf tuto ci-dessus ) et lancement de ce script py , le test de la comlunication USB entre le RPI3 et la carte Arduino est ok
pi@raspberrypi:~/python_games $ python test_serial.py MSG # 0 read : - MSG # 1 read : Sun, 11 Jun 2017 13:44:35 +0000 MSG # 2 read : Sun, 11 Jun 2017 13:44:46 +0000 MSG # 3 read : Sun, 11 Jun 2017 13:44:57 +0000 MSG # 4 read : Sun, 11 Jun 2017 13:45:08 +0000 MSG # 5 read : Sun, 11 Jun 2017 13:45:19 +0000
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Made By Humans
Posté 11 juin 2017 - 01:30
Mike, Gerardosamara avait déjà le lien
Je précise ma pensée.
Il y a le ftp qui vient d'office avec le ssh (sftp) pour transférer tes sources. Et, t'es pas obligé d'utiliser l'ide d'arduino. Tu peux prendre SublimeText2, par exemple, qui enregistre ton source directement sur le pi, via sftp.
Perso, j'utilise encore une autre solution. Je dev sur mon ide préféré. Je push les sources sur un git. Et le pi les pull. Un petit script sh sur le pi te fait le git pull, le make et le make upload sur arduino en une commande
Staff Robot Maker
Posté 11 juin 2017 - 02:59
Lui il a le lien, mais là moi je l'ai pas Et je veux entre autre faire la même chose sur mon serveur perso
Je suis pas sûr d'avoir bien compris mais en tout cas ce que tu as expliqué m'intéresse !
On ne va pas pourrir le sujet en cours, et on va prendre les bonnes habitudes => Ouverture d'un sujet dédié ! Programmons à distance nos arduino !
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 20 juin 2017 - 08:44
Finalement pour l'instant je ne vais pas acheter une Caméra PI V2 Noir pour le retour vidéo du robot car j'ai retrouvé une caméra USB ( Microsoft Lifecam VX800 ) datant de l'époque ou les laptops n'avaient pas de caméra intégré .
Cette caméra est reconnue par le Rpi3 à l'aide de l'application motion ( sudo apt-get install motion )
La charge CPU du PI de "motion" oscille entre 10 et 15 %
Screenshot du flux video affiché dans le navigateur avec un framerate de 2 et résolution de 640x480

Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Membre passionné
Posté 22 juin 2017 - 10:29
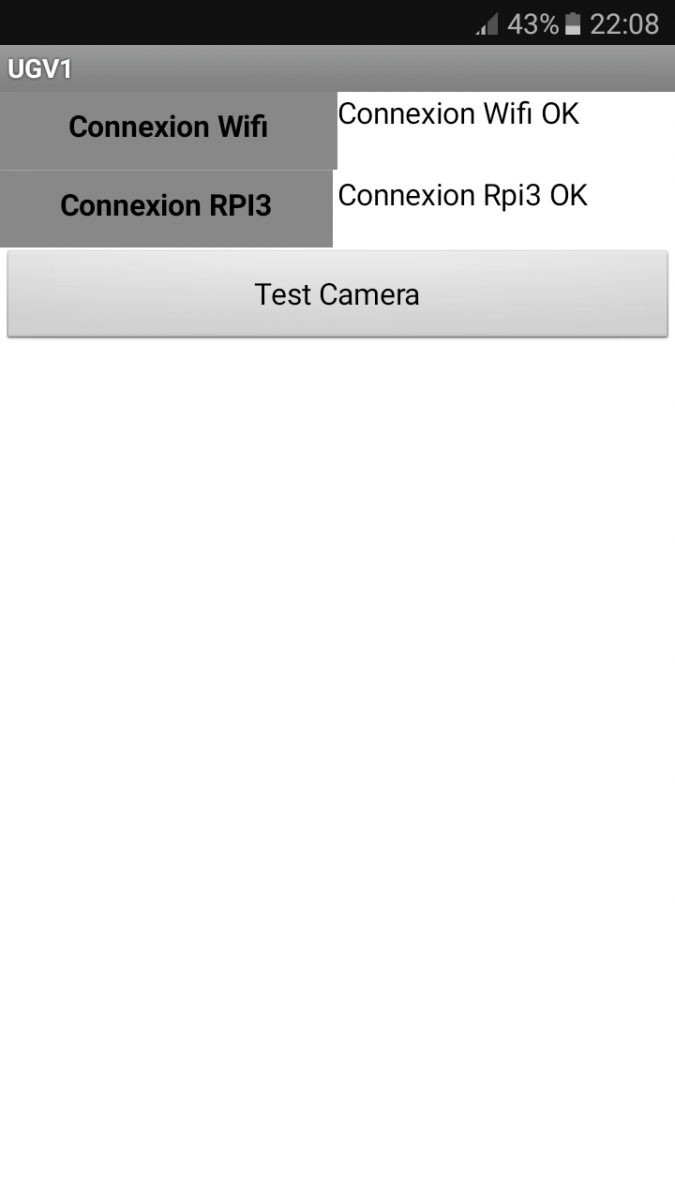
Retour sur l'application Android de controle du robot à partir d'un smartphone initialement prévu avec "Imperihome" et ses widgets de type bouton pour envoyer des commandes "http request + Post" vers le robot ( Démarrer , Tourner à droite etc)
Finalement je vais abandonner cette idée et développer une app android avec le logiciel MIT Inventor 2 ( le langage Blocky est également présent sur mon logiciel domotique Domoticz )
Un premier avancement avec la connexion au réseau Wifi.
La suite sera de tester la connexion avec le Rpi3 ( serveur web httptpd )

Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Membre passionné
Posté 22 juin 2017 - 09:20
Suite ... test de la connexion avec le Rpi3 ( accès page Web du serveur web httptpd installé sur le Rp3 )
La prochaine étape sera de tester le retour vidéo de la camera du Rpi3 et la mini API entre le Rpi3 / script Python et l'app Android pour la transmission des commands du robot AV AR ... )
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Membre passionné
Posté 23 juin 2017 - 01:26
Ajout du retour video dans l'app android inventor2 de control du robot mobile "ugv1" ( webcam usb connectée sur le Rpi3 + motion )
La prochaine évolution permettra de tester la mini API entre le Rpi3 + script Python et l'app Android pour la transmission des commands du robot AV AR ... )

Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Membre passionné
Posté 23 juin 2017 - 04:50
Le logiciel "motion" est installé sur Raspbian du Rpi3 et son Live stream server (mini http server) écoute pour une requete sur le port 8081 par default .
J'ai laissé pour le test le débit par default de 1 fs
( cf /etc/motion/motion.conf)
Coté app inventor 2 android et sa programmation par bloc , le flux video est lu par le composant "webviewer" selon l'URL fournie
Dans mon cas , l'URL est http://IP_Rpi3:8081
Par exemple un click sur le bouton "DemoWebviewer" ouvrira la page "coldstreams.com"

Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/









0 members, 0 guests, 0 anonymous users








