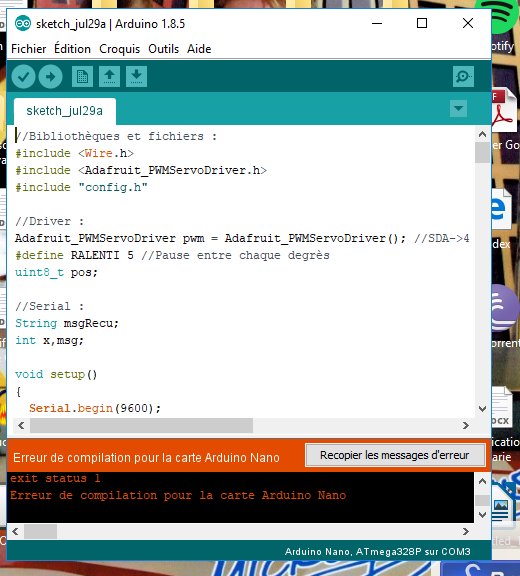
super merci j'ai installé la librairie et le code avance déja mieux mais il se bloque encore
Arduino : 1.8.5 (Windows 10), Carte : "Arduino Nano, ATmega328P"
C:\Program Files\Arduino\arduino-builder -dump-prefs -logger=machine -hardware C:\Program Files\Arduino\hardware -tools C:\Program Files\Arduino\tools-builder -tools C:\Program Files\Arduino\hardware\tools\avr -built-in-libraries C:\Program Files\Arduino\libraries -libraries D:\Mes documents\Arduino\libraries -fqbn=arduino:avr:nano:cpu=atmega328 -ide-version=10805 -build-path C:\Users\Jordan\AppData\Local\Temp\arduino_build_103940 -warnings=all -build-cache C:\Users\Jordan\AppData\Local\Temp\arduino_cache_723918 -prefs=build.warn_data_percentage=75 -prefs=runtime.tools.arduinoOTA.path=C:\Program Files\Arduino\hardware\tools\avr -prefs=runtime.tools.avr-gcc.path=C:\Program Files\Arduino\hardware\tools\avr -prefs=runtime.tools.avrdude.path=C:\Program Files\Arduino\hardware\tools\avr -verbose D:\Mes documents\Arduino\sketch_jul29a\sketch_jul29a.ino
C:\Program Files\Arduino\arduino-builder -compile -logger=machine -hardware C:\Program Files\Arduino\hardware -tools C:\Program Files\Arduino\tools-builder -tools C:\Program Files\Arduino\hardware\tools\avr -built-in-libraries C:\Program Files\Arduino\libraries -libraries D:\Mes documents\Arduino\libraries -fqbn=arduino:avr:nano:cpu=atmega328 -ide-version=10805 -build-path C:\Users\Jordan\AppData\Local\Temp\arduino_build_103940 -warnings=all -build-cache C:\Users\Jordan\AppData\Local\Temp\arduino_cache_723918 -prefs=build.warn_data_percentage=75 -prefs=runtime.tools.arduinoOTA.path=C:\Program Files\Arduino\hardware\tools\avr -prefs=runtime.tools.avr-gcc.path=C:\Program Files\Arduino\hardware\tools\avr -prefs=runtime.tools.avrdude.path=C:\Program Files\Arduino\hardware\tools\avr -verbose D:\Mes documents\Arduino\sketch_jul29a\sketch_jul29a.ino
Using board 'nano' from platform in folder: C:\Program Files\Arduino\hardware\arduino\avr
Using core 'arduino' from platform in folder: C:\Program Files\Arduino\hardware\arduino\avr
Detecting libraries used...
"C:\Program Files\Arduino\hardware\tools\avr/bin/avr-g++" -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10805 -DARDUINO_AVR_NANO -DARDUINO_ARCH_AVR "-IC:\Program Files\Arduino\hardware\arduino\avr\cores\arduino" "-IC:\Program Files\Arduino\hardware\arduino\avr\variants\eightanaloginputs" "C:\Users\Jordan\AppData\Local\Temp\arduino_build_103940\sketch\sketch_jul29a.ino.cpp" -o "nul"
"C:\Program Files\Arduino\hardware\tools\avr/bin/avr-g++" -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10805 -DARDUINO_AVR_NANO -DARDUINO_ARCH_AVR "-IC:\Program Files\Arduino\hardware\arduino\avr\cores\arduino" "-IC:\Program Files\Arduino\hardware\arduino\avr\variants\eightanaloginputs" "-IC:\Program Files\Arduino\hardware\arduino\avr\libraries\Wire\src" "C:\Users\Jordan\AppData\Local\Temp\arduino_build_103940\sketch\sketch_jul29a.ino.cpp" -o "nul"
"C:\Program Files\Arduino\hardware\tools\avr/bin/avr-g++" -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10805 -DARDUINO_AVR_NANO -DARDUINO_ARCH_AVR "-IC:\Program Files\Arduino\hardware\arduino\avr\cores\arduino" "-IC:\Program Files\Arduino\hardware\arduino\avr\variants\eightanaloginputs" "-IC:\Program Files\Arduino\hardware\arduino\avr\libraries\Wire\src" "-ID:\Mes documents\Arduino\libraries\Adafruit-PWM-Servo-Driver-Library-master" "C:\Users\Jordan\AppData\Local\Temp\arduino_build_103940\sketch\sketch_jul29a.ino.cpp" -o "nul"
"C:\Program Files\Arduino\hardware\tools\avr/bin/avr-g++" -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10805 -DARDUINO_AVR_NANO -DARDUINO_ARCH_AVR "-IC:\Program Files\Arduino\hardware\arduino\avr\cores\arduino" "-IC:\Program Files\Arduino\hardware\arduino\avr\variants\eightanaloginputs" "-IC:\Program Files\Arduino\hardware\arduino\avr\libraries\Wire\src" "-ID:\Mes documents\Arduino\libraries\Adafruit-PWM-Servo-Driver-Library-master" "C:\Users\Jordan\AppData\Local\Temp\arduino_build_103940\sketch\sketch_jul29a.ino.cpp" -o "C:\Users\Jordan\AppData\Local\Temp\arduino_build_103940\preproc\ctags_target_for_gcc_minus_e.cpp"
D:\Mes documents\Arduino\sketch_jul29a\sketch_jul29a.ino:4:20: fatal error: config.h: No such file or directory
#include "config.h"
^
compilation terminated.
Utilisation de la bibliothèque Wire version 1.0 dans le dossier: C:\Program Files\Arduino\hardware\arduino\avr\libraries\Wire
Utilisation de la bibliothèque Adafruit-PWM-Servo-Driver-Library-master version 1.0.2 dans le dossier: D:\Mes documents\Arduino\libraries\Adafruit-PWM-Servo-Driver-Library-master
exit status 1
Erreur de compilation pour la carte Arduino Nano
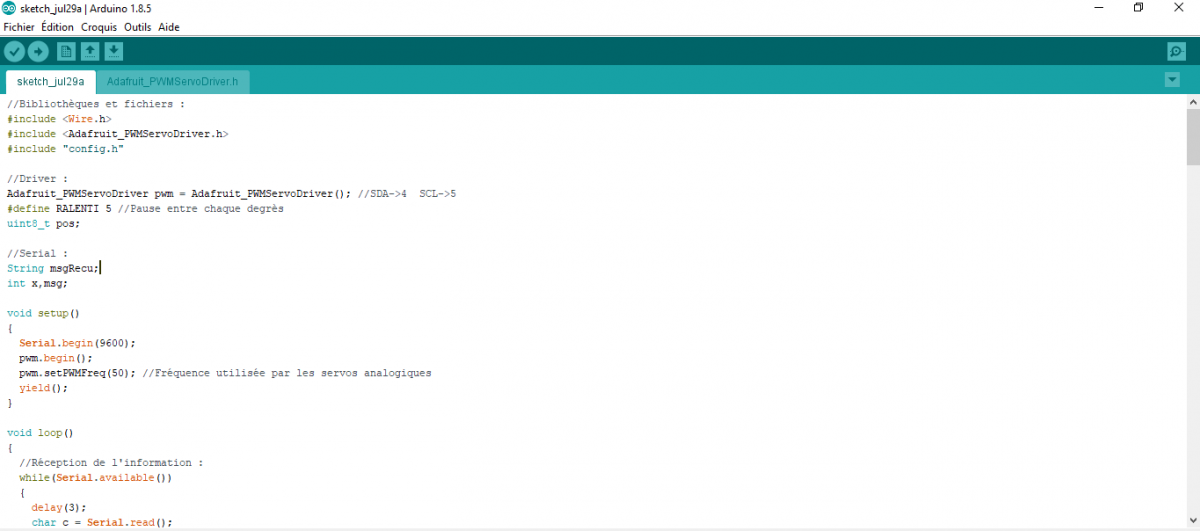
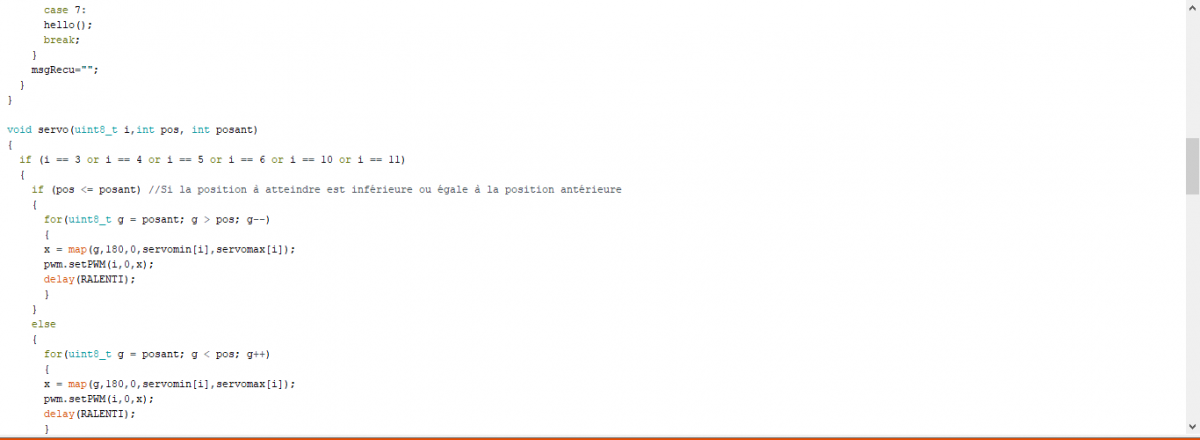
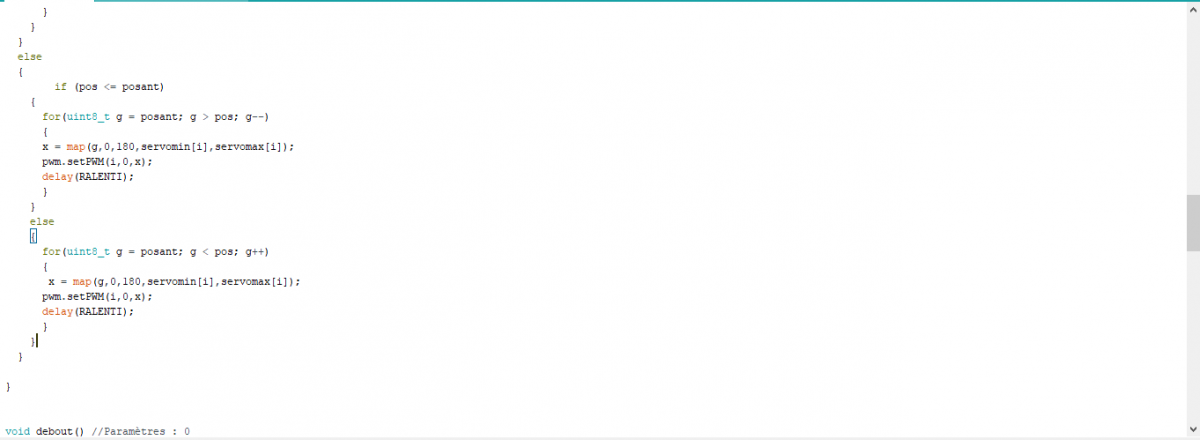
de plus voici dans mon éditeur les informations que le vérificateur met en orange.
effectivement quand j'ai chargé la bibliothèque adafruit, elle ne s'est plus affichée en orange dans le code...
encore merci pour vos explications et votre soutien... bonne journée à tous
PS: mon fils rentre de vacances dans 1 semaine je vous promets une video de lui qui voit bouger son robot pour la première fois...