C'est pas faux, même si déjà la modélisation j'en faisais beaucoup moins, mais comme j'alimente déjà le tout par deux alimentations et je n'exploite pas apparemment à fond certains servos d'ou mes questions pour la suite ^^
Ceci dis je bouge déjà les servos même sans exploiter leurs capacités à 100 %, j'utilise l'écran E-paper, j'ai le convertisseur logique, le capteur de distance, bientôt la central inertielle, le driver pololu mestro, tout est branché en même temps...
Une alime pour la pi qui gère l'arduino (même si pour l'instant l'arduino est branché sur le pc).
Une alime pour les servos.
J'hésite à installer le capteur de température et les ventilos, vous en pensez quoi ??
Il me restera plus tard à brancher la cam, les micros, les HP, sur la Pi, et voir surtout comment décortiquer le capteur de lumière sur la cam pour le placer sur le tête à savoir si je réutilise celui par défaut ou si j'en installe un autre.
Sinon ben oui j'ai hâte d'imprimer tout de même faut l'avouer, histoire de voir un peu bouger tout ça concrètement ^^
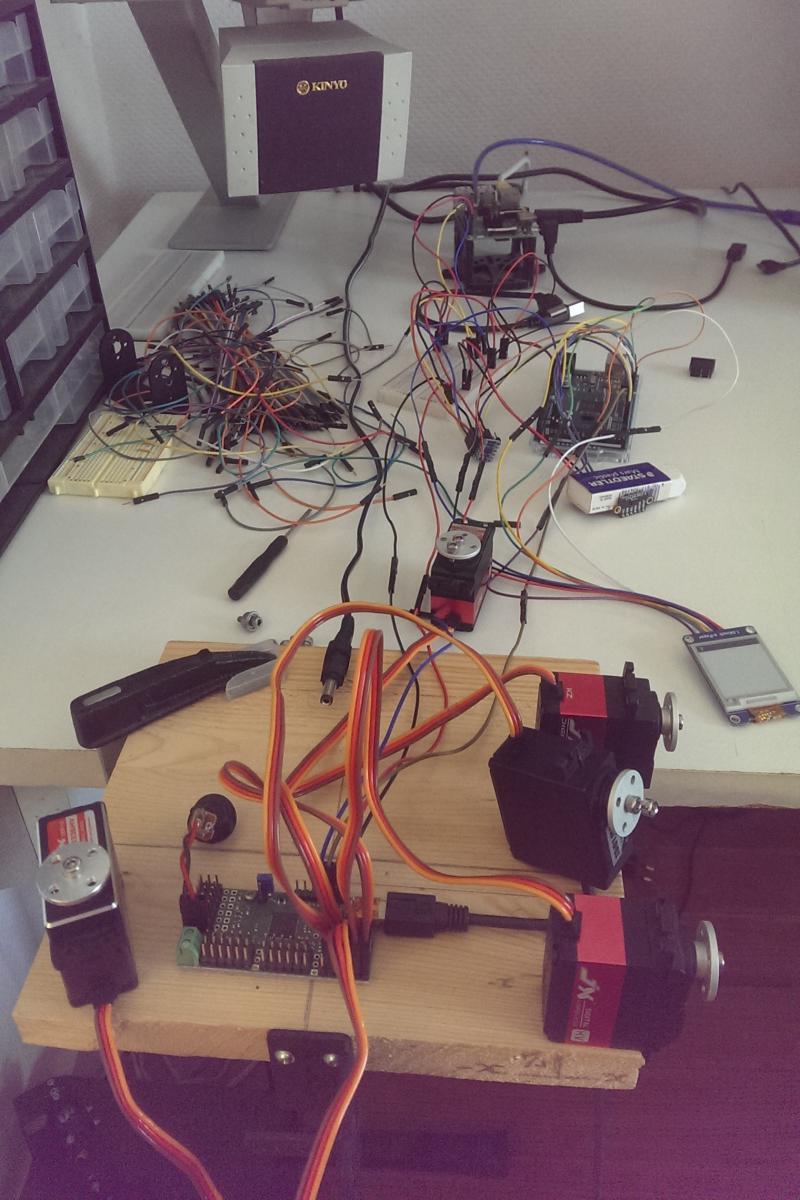
(Bon faut pas s'occuper des fils sur la gauche) ^^
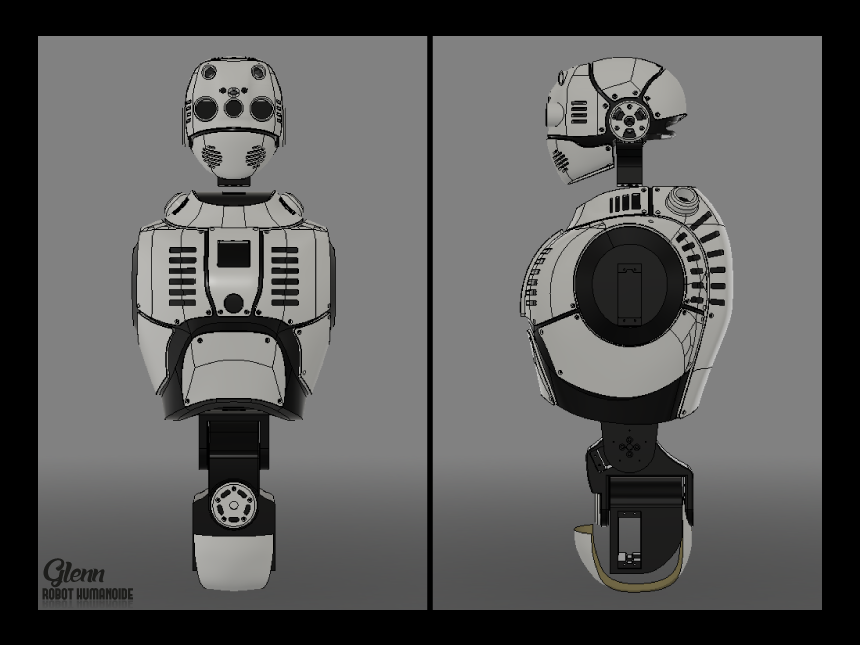
PS : j'ai fais quelques modif sur le corps de Glenn, j'ai placé deux interrupteurs au haut du torse un qui permet de lancer les servo et l'autre pour la pi...
J'en ai profiter pour faire quelques modifs à droite à gauche, et j'ai commencé le bras ^^

Modifié par Oliver17, 21 mai 2018 - 07:44 .