

Si, ça devrait fonctionner aussi mais pour l'utilisation en 2d avec une tourelle fixe ça va t’embêter je pense.

219 réponses à ce sujet
#142

Serveurperso
-

- Membres
-

- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 04 février 2018 - 10:48
Surtout si l'angle est prononcé tu vas mesurer le sol lol comme le petit robot quand il monte sur un gros tapis ben fouac ça stop l'autopilote (obstacle)
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#144
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 04 février 2018 - 11:20
On vois souvent des lidars 2D montés en double axe, pour moi c'est idéal car permet de faire un mouvement circulaire, même de toute petite amplitude et/ou stabiliser l'horizon.
Du coup ou lieu d'avoir une ligne 2D t'as nuage de point en forme de cylindre, quelques degrés suffisent pour augmenter la perception du robot et fiabiliser l'anticolision, même si on fonctionne toujours avec des maths 2D !
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#145
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 04 février 2018 - 11:21
(A tester sur un prochain robot lol)
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#146
Mike118
-

- Administrateur
-
- 9â¯959 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 04 février 2018 - 11:50
autre chose aussi : lidar monté à 90° et tu mets un moteur pour faire tourner le lidar plutôt que de faire tourner le robot sur lui même =)
ça sera beaucoup plus précis et c'est pour ce genre de chose que j'ai ce moteur pas à pas et que je propose le slipring ( = collecteur tournant ) qui va avec =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!

#149
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 06 février 2018 - 08:26
ben oui mais "tout le monde" c'est nul;D Si j'avais suivi tout le monde j'aurais pas fait mon robot !
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#151
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 06 février 2018 - 08:38
Faut faire des essais hors robot... car ce sera lent donc pas de mouvement
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#152
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 11 février 2018 - 08:18
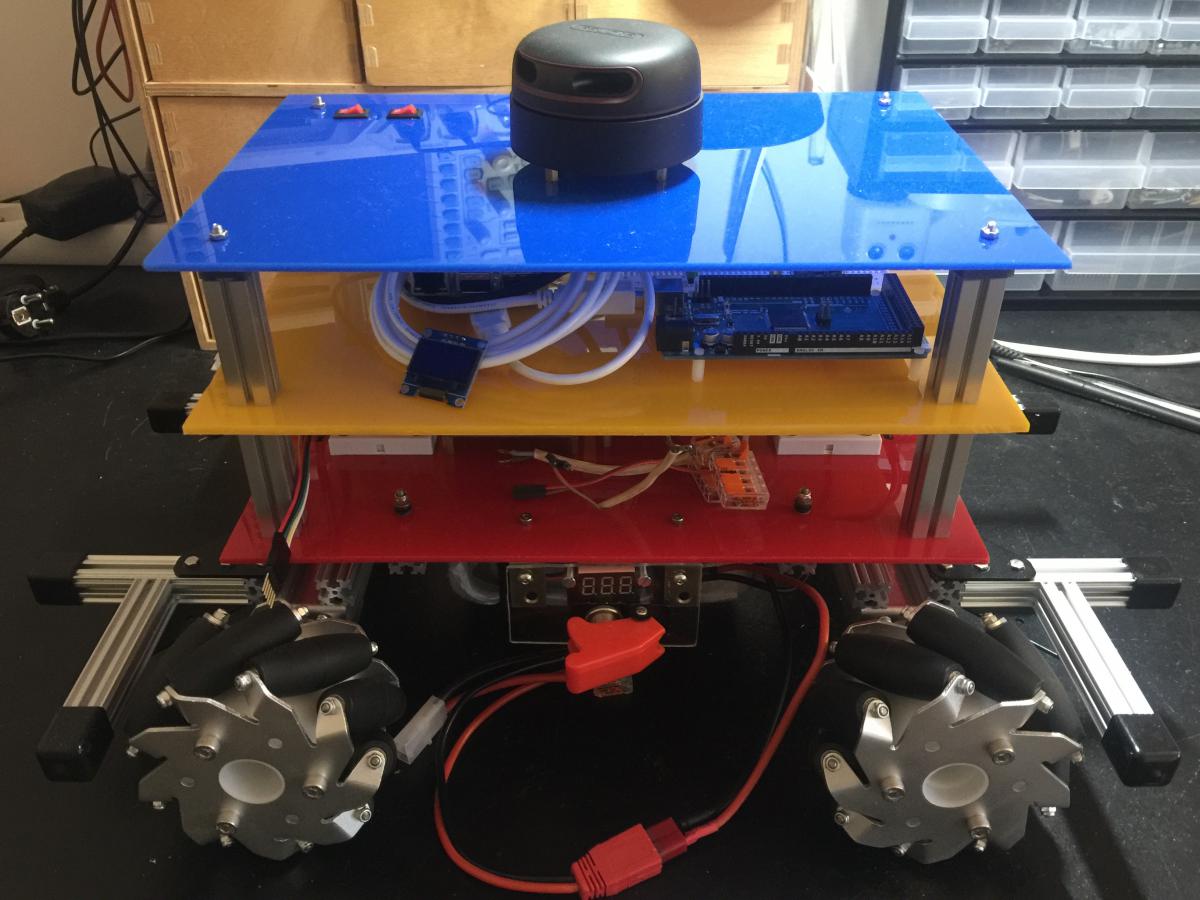
Quelques news hebdo du Hector.
Toujours sur la partie mécanique. Voilà à quoi il ressemble maintenant.
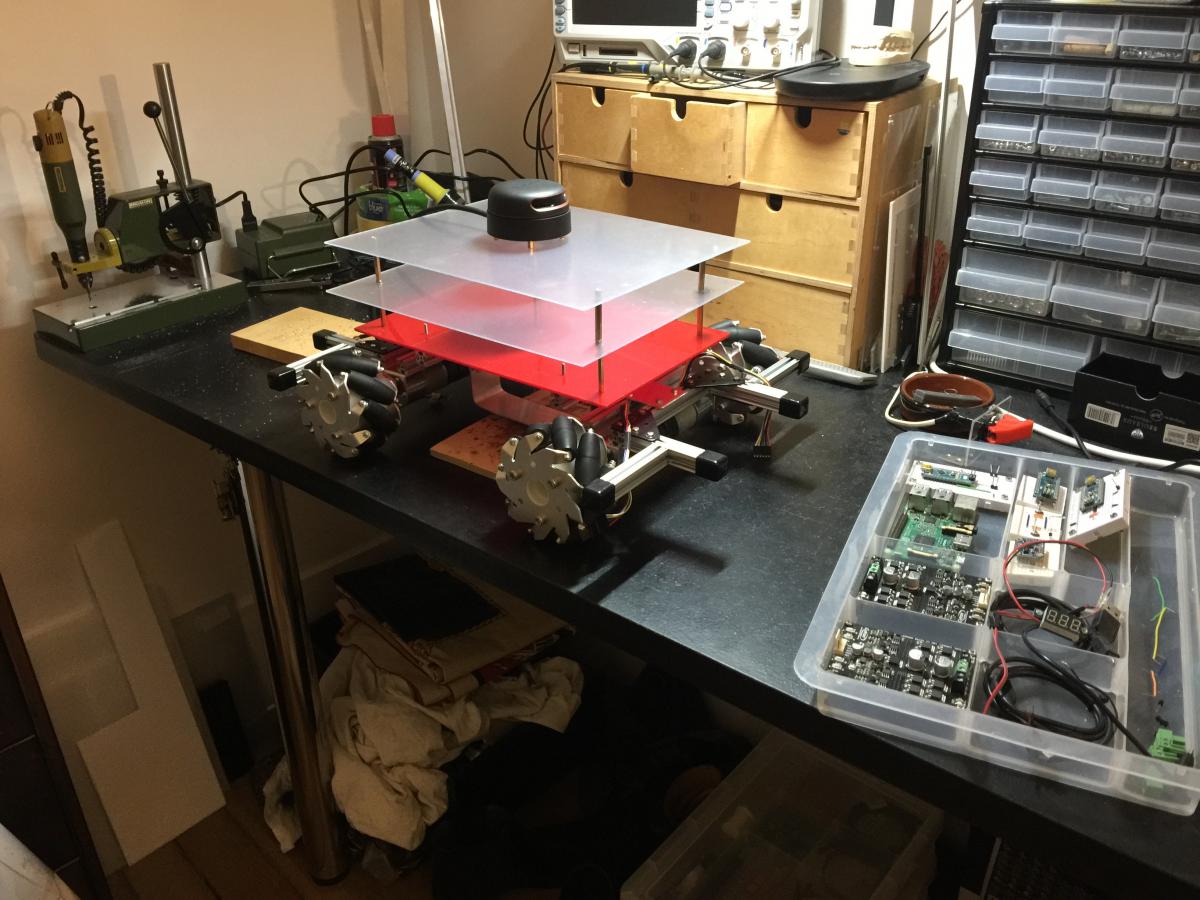
Le lidar est à 22 cm de hauteur. Il fait 49 cm de long et 33 de large.
Il comporte le chassis souple vu plus haut. Les plaques de plexiglass sont sur les suspensions.
Il y a 3 arduino nano, un raspberry, un bno555, 2 drivers pour les moteurs, 4 moteurs avec encodeurs.
Il y a de la marge pour ajouter plus tard une cam, des capteurs de proximité sous la barre des 22cm. En option si bessoin. Je pourrai recycler mes 4 VLX(truc).
La batterie est prévue sous le chassis. C'est une NiMH 12V 4A
PS. Et dans in premier temps, je vais rester sur une coupe 2D horizontale. Je vais pas mettre le lidar sur un axe tout de suite.
- Serveurperso, Oracid, Mike118 et 1 autre aiment ceci
#153
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 23 février 2018 - 02:35
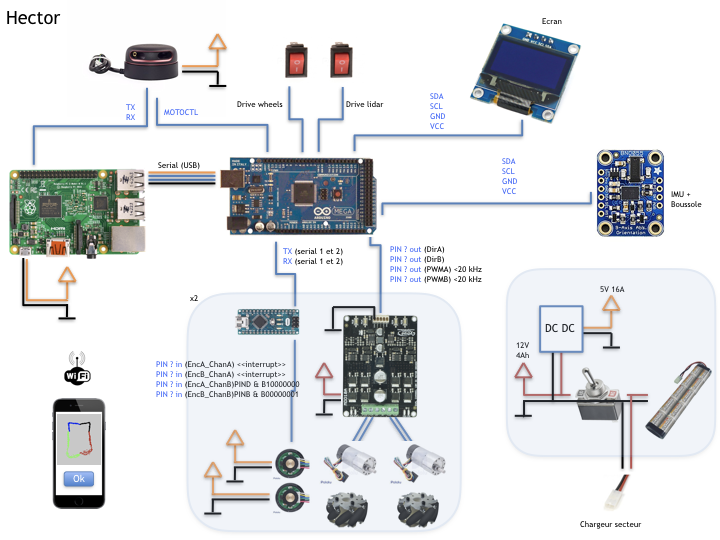
Des nouvelles de Hector,
J'ai fini la partie châssis et coffre supérieur. J'ai pas pris le temps de vous montrer ça avant de tout démonter. Promis, je reviendrai dessus.
J'ai commencé la partie câblage. Ça ressemble à ça :
- Serveurperso, Melmet, Mike118 et 1 autre aiment ceci
#154
Melmet
-

- Modérateur
-
- 1â¯519 messages
Pilier du forum
- Gender:Male
- Location:Saint-Sozy (46200)
Posté 23 février 2018 - 06:05
Des nouvelles de Hector,
J'ai fini la partie châssis et coffre supérieur. J'ai pas pris le temps de vous montrer ça avant de tout démonter. Promis, je reviendrai dessus.
J'ai commencé la partie câblage. Ça ressemble à ça :

J'adore ce genre de schéma 
Ne demande jamais à un robot de faire ce que tu peux faire toi même. 

#156
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 24 février 2018 - 12:47
Bon j'avais oublié comment c'est pas simple de changer le fréquence d'un signal pwm sur arduino ...
Du coup je vais laisser la PI gérer ce signal. Comme expliqué plus haut avec pigpio.
#157
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 11 mars 2018 - 06:54
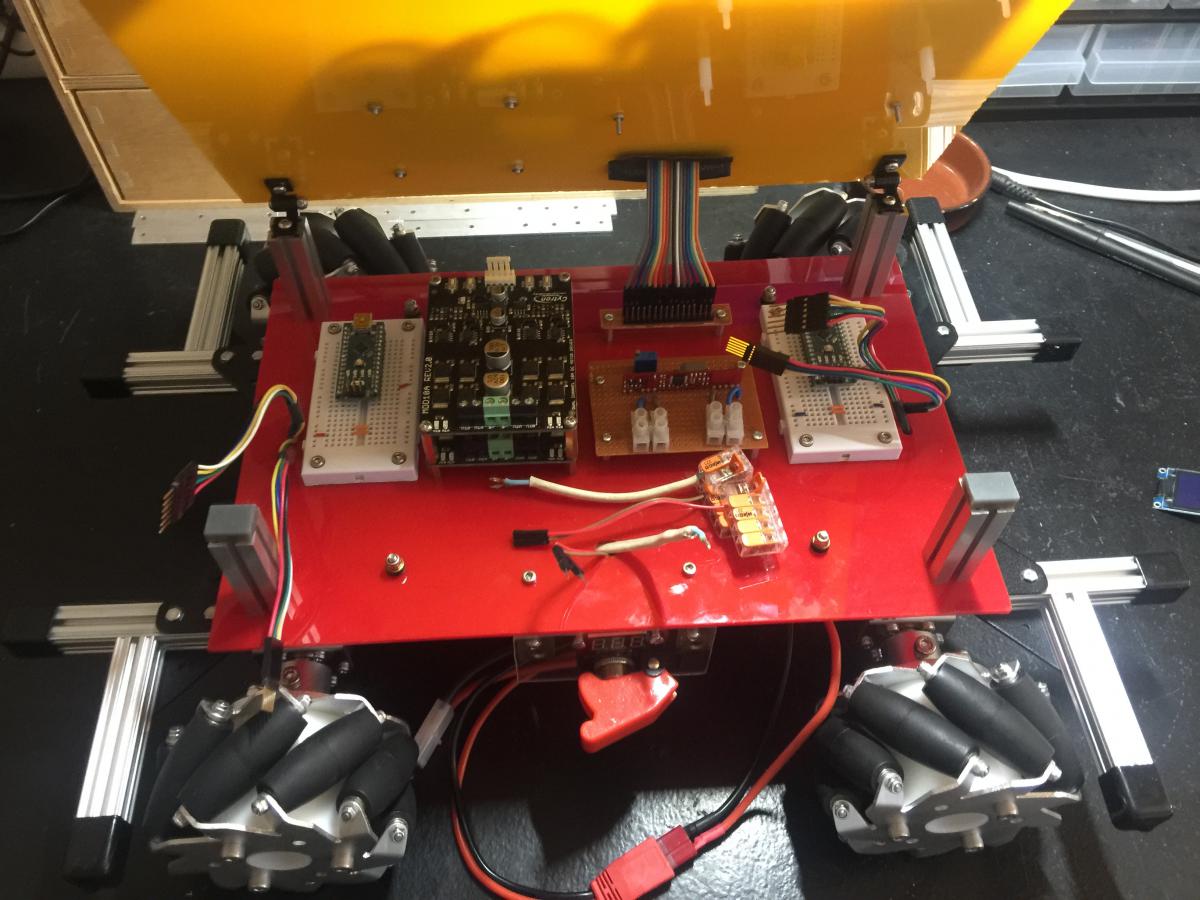
Voilà quelques nouvelles de Hector.
J'ai avancé sur le boitier, posé sur le chassis. Chaque étage est monté sur une charnière pour accéder directement aux composants.
A noter, sous le châssis, j'ai fixé la batterie. Là, c'est un zoom sur les petits amortisseurs de vibrations. J'ai utilisé les amortisseurs livrés avec les servos MG995. 2 en dessous et 1 au dessus, séparés par des rondelles et un écrou auto bloquant. La tige verticale est serrée sur le châssis.

Le premier étage avec les 2 nano pour déterminer la vitesse des 4 moteurs. Les 2 drivers moteurs. un convertisseur 12V 5V et la nappe vers l'étage 2. J'ai placé 2 morceaux de gaine rétractable sur les bords de la fente pour que la nappe glisse bien dedans.
L'étage 2 avec le pi pour l'analyse des trames du rplidar et le slam. la boussole, un petit écran d'infos et une mega pour piloter ces 2 composants et l'étage du dessous.
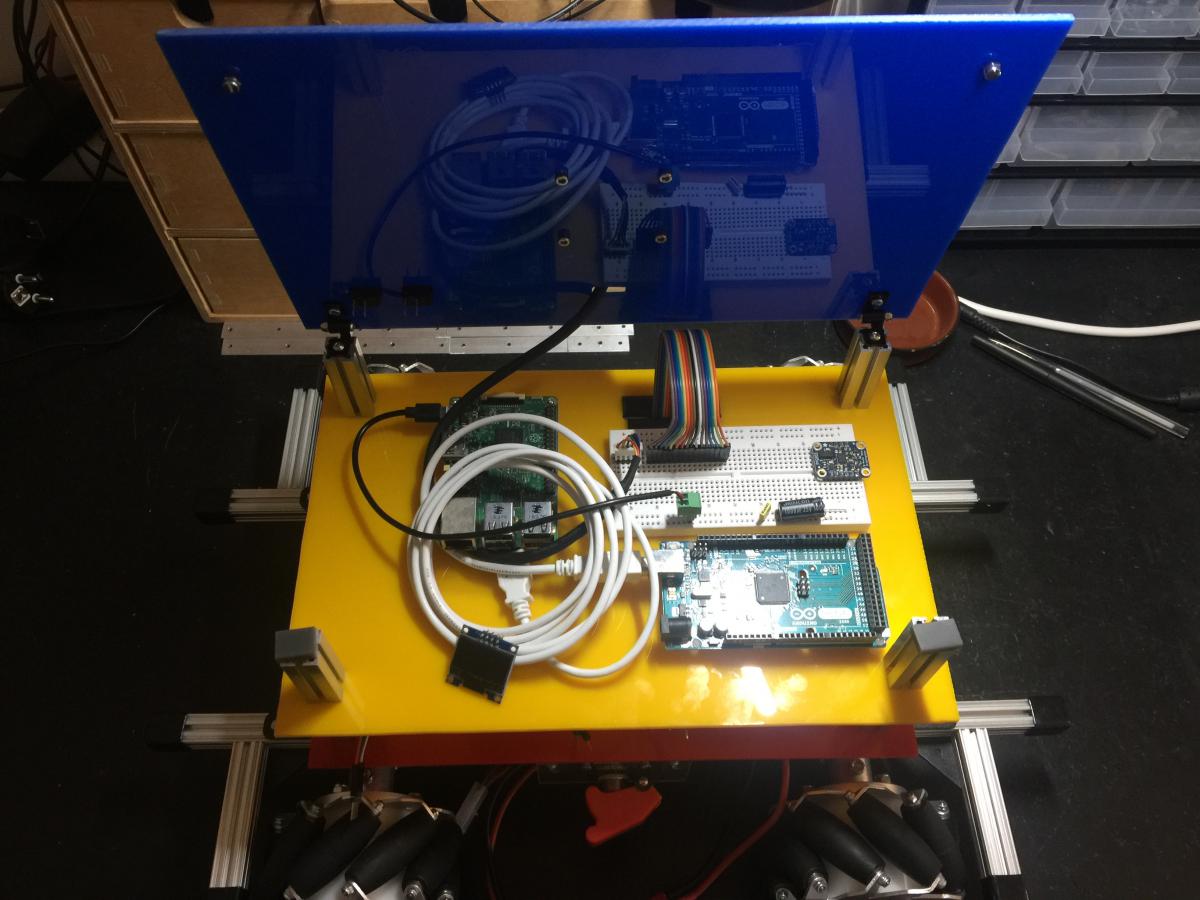
Il me reste à placer des caches sur coté pour fermer la boite.
Et une dernière pour la route. Ce serait quand même plus simple avec une imprimante ...
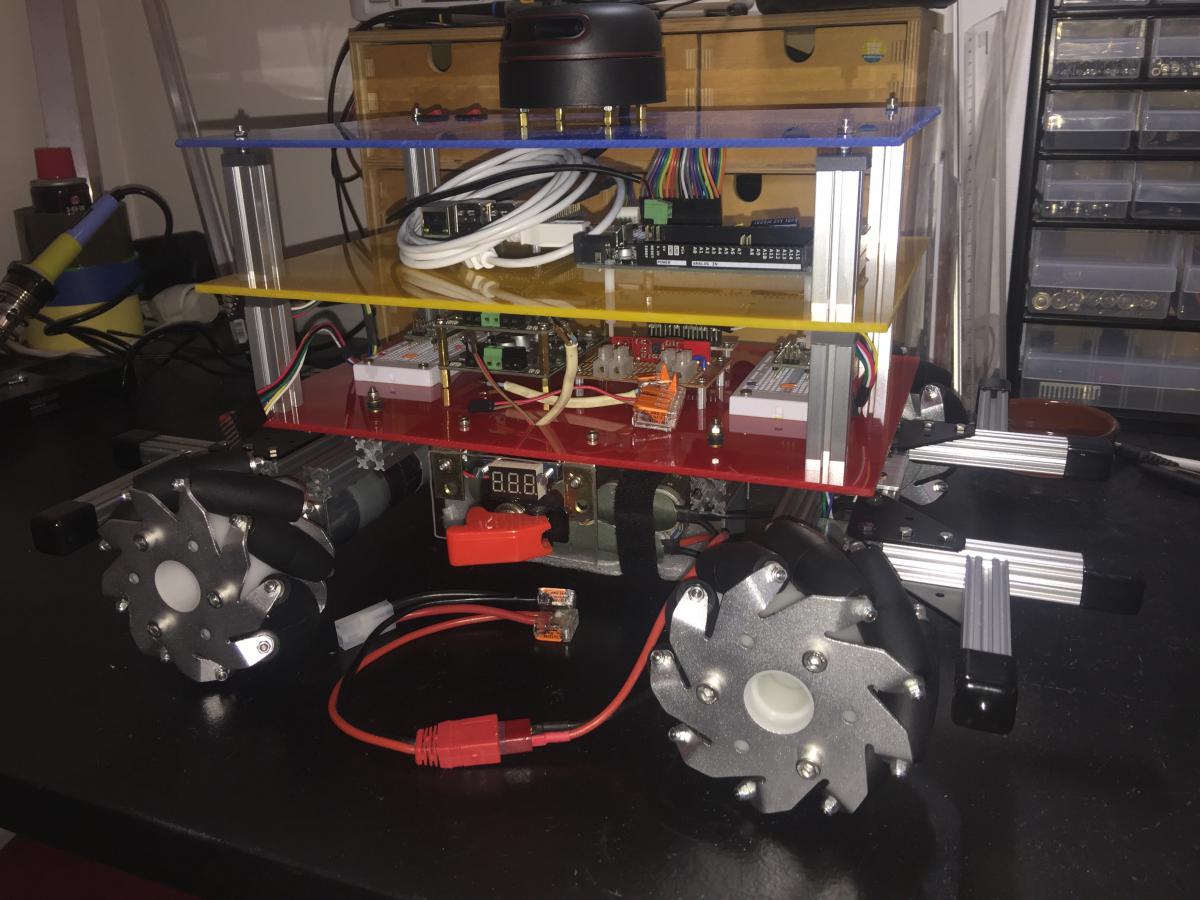
Maintenant, il faut passer au câblage.
- Serveurperso, ashira, Jekert et 1 autre aiment ceci
#158
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 11 mars 2018 - 07:04
T'as bien avancé Moi j'ai fini le replay vidéo+data cad. que les pages sont animées en permanence comme si le robot était piloté
Moi j'ai fini le replay vidéo+data cad. que les pages sont animées en permanence comme si le robot était piloté
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#160
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 11 mars 2018 - 07:16
Mais du coup t'as pas la moindre suspension ou articulation pour que les 4 roues mecanum soit en permanence en contact avec le sol et avoir des straffs précis ?
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : VL53L0X, Odomètrie, RPLIDAR A2, Arduino Due




0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




