J'ouvre ce sujet pour parler des méthodes de calcule d'angle pour qu'un bras puisse atteindre un point en 2 dimensions.
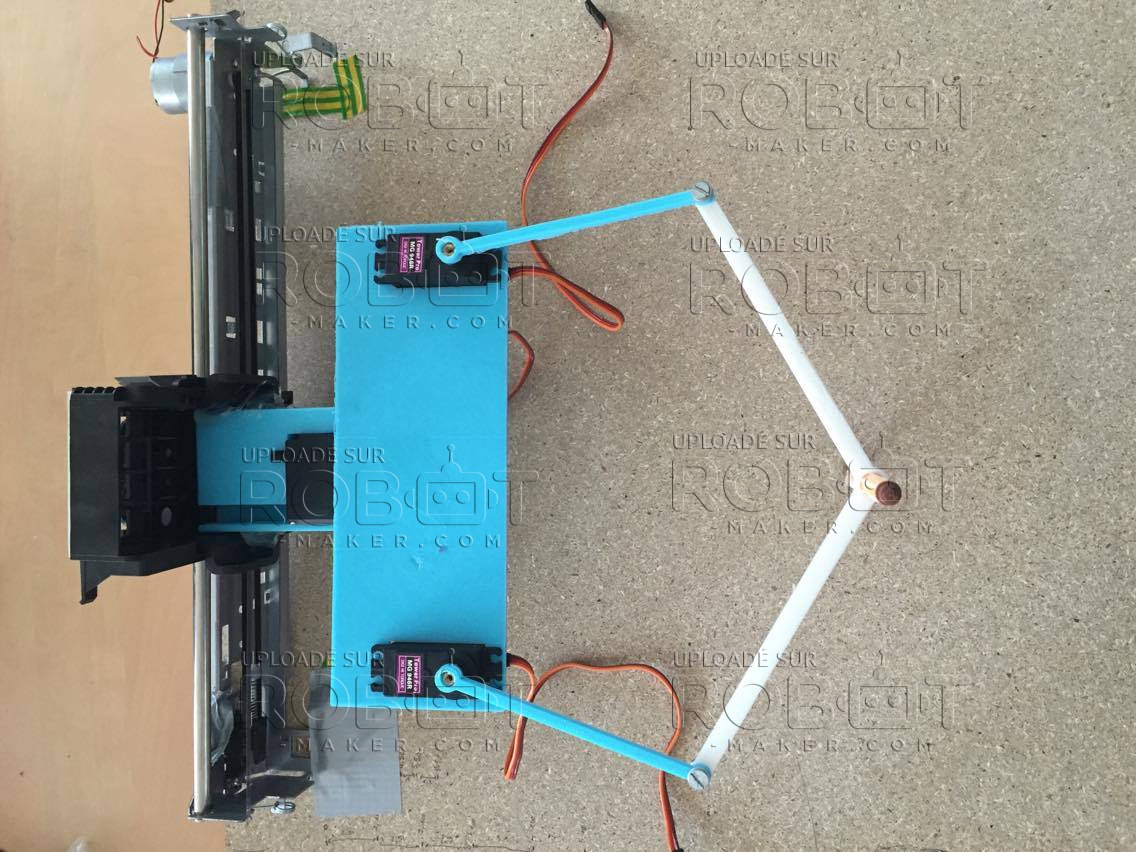
Je voudrai faire un petit bras à 2 segments et 2 servomoteurs pour pouvoir utiliser la caméra usb et les calculs des coordonnées indiquées dans ce poste http://www.robot-maker.com/forum/topic/10876-camera-usb-n1-testee-par-ashira/
Ce que je voudrai faire:
Le bras est composé d'un segment A et B de longueur connue et on doit atteindre le point R dont les coordonnées a et b sont connues aussi (mesurées par la caméra).
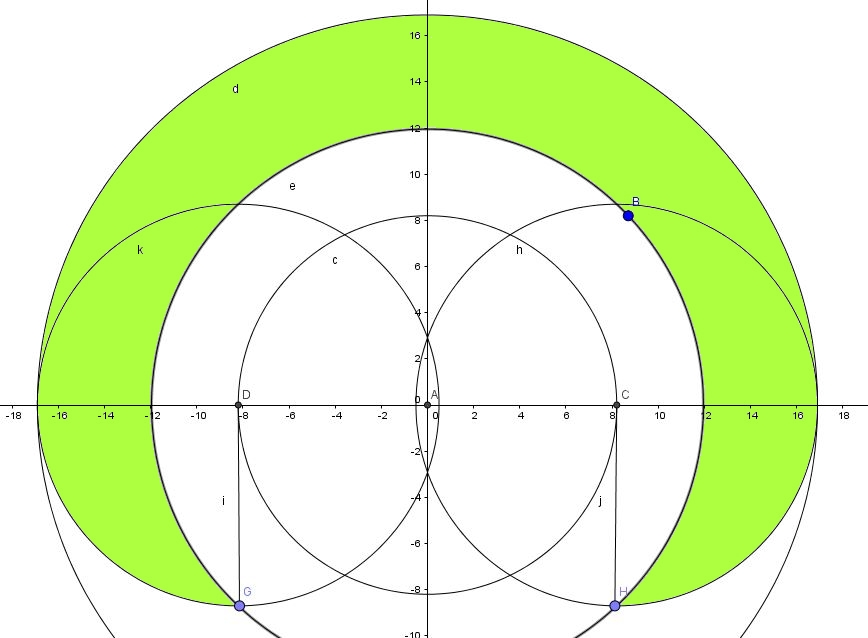
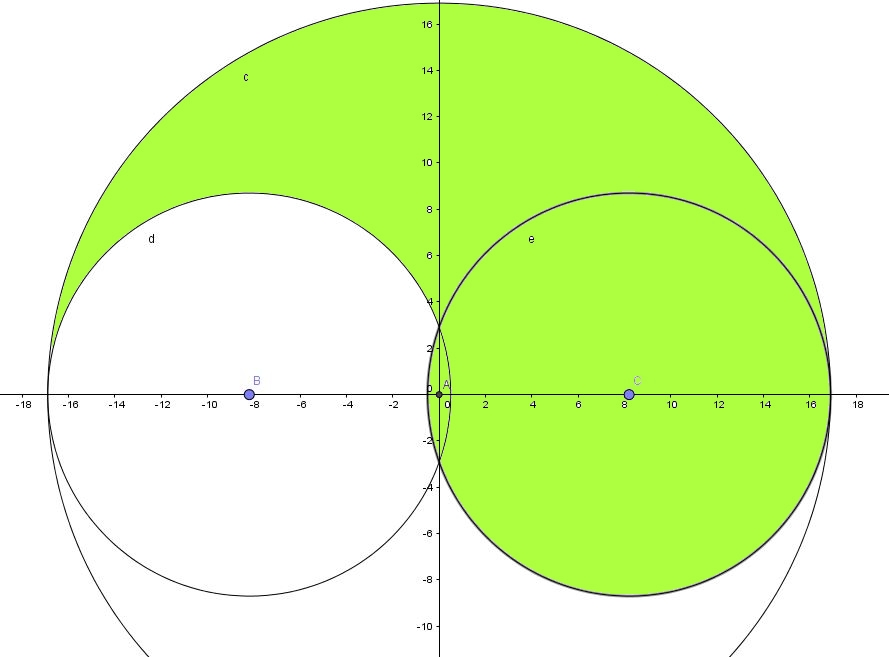
Le cercle C1 représente l'ensemble des points parcourus par la liaison des segments A et B, et le cercle C2 a pour centre R et son rayon est la longueur du segment B.
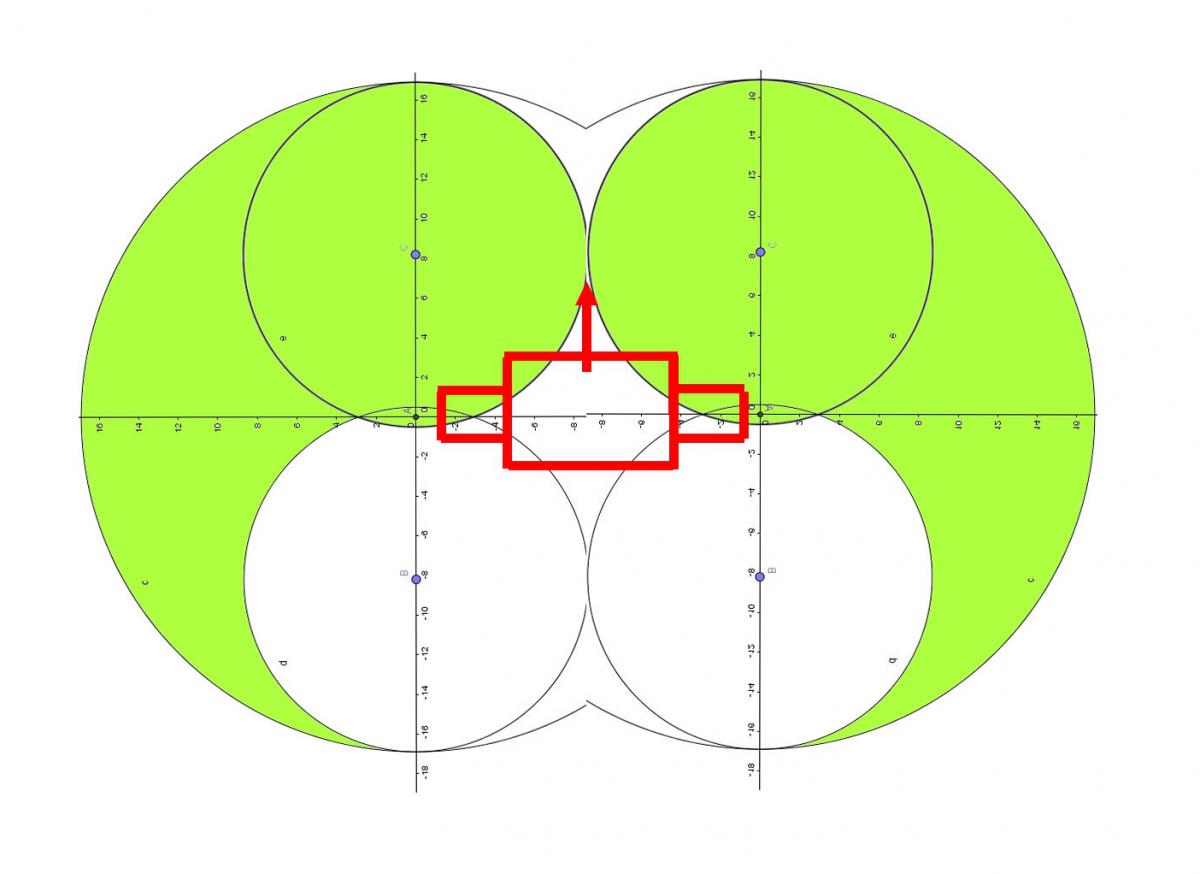
L'intersection de ces 2 cercles, P1 et P2, sont les points où la liaison entre A et B doit se trouver pour que le bout du bras B ait une chance d'atteindre R. Si il n'y a pas d'intersection, c'est que l'objet est trop loin pour être atteint.
Une fois P1 et P2 calculés, on choisit un des deux point et on calcule les angles avec les formules de trigonométrie.
Pour la première partie: calcul de P1et P2.
-On résout l'équation C1=C2, ce qui donne l'équation d'une droite y=ax+b, passant par P1 et P2.
-On résout "la droite"="un des cercle" et on trouve enfin les point P1 et P2. (ça mène à un polynôme de second degrés, que l'on résout avec delta etc).
J'ai fait une feuille excel pour faire des exemples de calcul, c'est presque bon j'ai du faire une erreur dans un développement^^


 .
. 
 )
)