Merci 
Pas mal les profilés...
Un jour peut-être, ils me serviront à une cnc 

Made By Humans

Posté 26 février 2017 - 07:37
Merci
Pas mal les profilés...
Un jour peut-être, ils me serviront à une cnc
Pilier du forum

Posté 27 février 2017 - 07:23
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Made By Humans
Posté 27 février 2017 - 08:05
Pilier du forum
Posté 27 février 2017 - 12:46
Pour fixer quelque chose sur un profilé, peux-tu nous montrer ce que tu utilises ? Les liens chez Motedis.Je me débrouille avec vis et écrou.
Mais j'ai peur de ne pas avoir compris la question.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Made By Humans
Posté 27 février 2017 - 08:28
Jusque là, je me suis fourni chez MakerBeam, dans la gamme OpenBeam : https://www.makerbeam.com/openbeam/
Pour fixer une pièce sur un profilé, je fais un trou dans la pièce et je fixe avec ces vis/écrous :
https://www.makerbea...gular-250p.html
https://www.makerbea...r-openbeam.html
https://www.makerbea...p-for-open.html
Sinon, j'utilise aussi https://www.makerbea...spacers-4p.html
ça aussi, c'est très pratique : https://www.makerbea...erbeam-25p.html
ça aussi : https://www.makerbea...or-makerbe.html
Mais tout ceci me parait tellement simple que je sais pas si j'ai répondu
Je connaissais pas Motedis.
Pilier du forum
Posté 28 février 2017 - 07:10
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Pilier du forum
Posté 28 février 2017 - 02:06
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Made By Humans
Posté 28 février 2017 - 02:44

Pilier du forum
Made By Humans
Posté 11 mars 2017 - 02:27
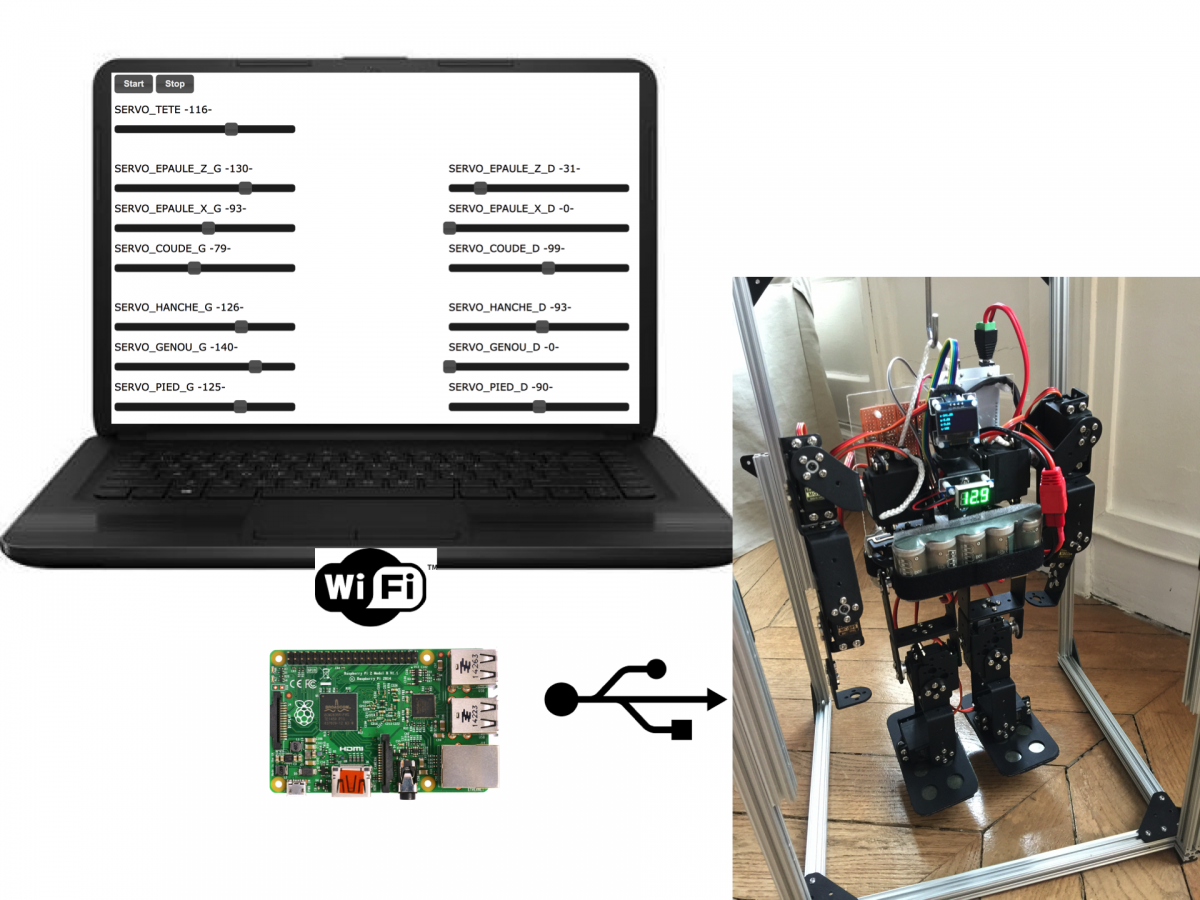
Il ne bouge pas beaucoup Émile. J'ai commencé à placer les première briques de code. Pour le moment, je vise une commande par câble usb avec mon montage favori : raspberry en master avec une interface web et le mega du robot en slave. J'ai fait quelques tests avec un lien série (Serial1) mais aucun intérêt.
Avec l'USB, le raspberry de commande pourra aussi verser les mises à jour du programme arduino. Et le tout (programmation + commande) via wifi
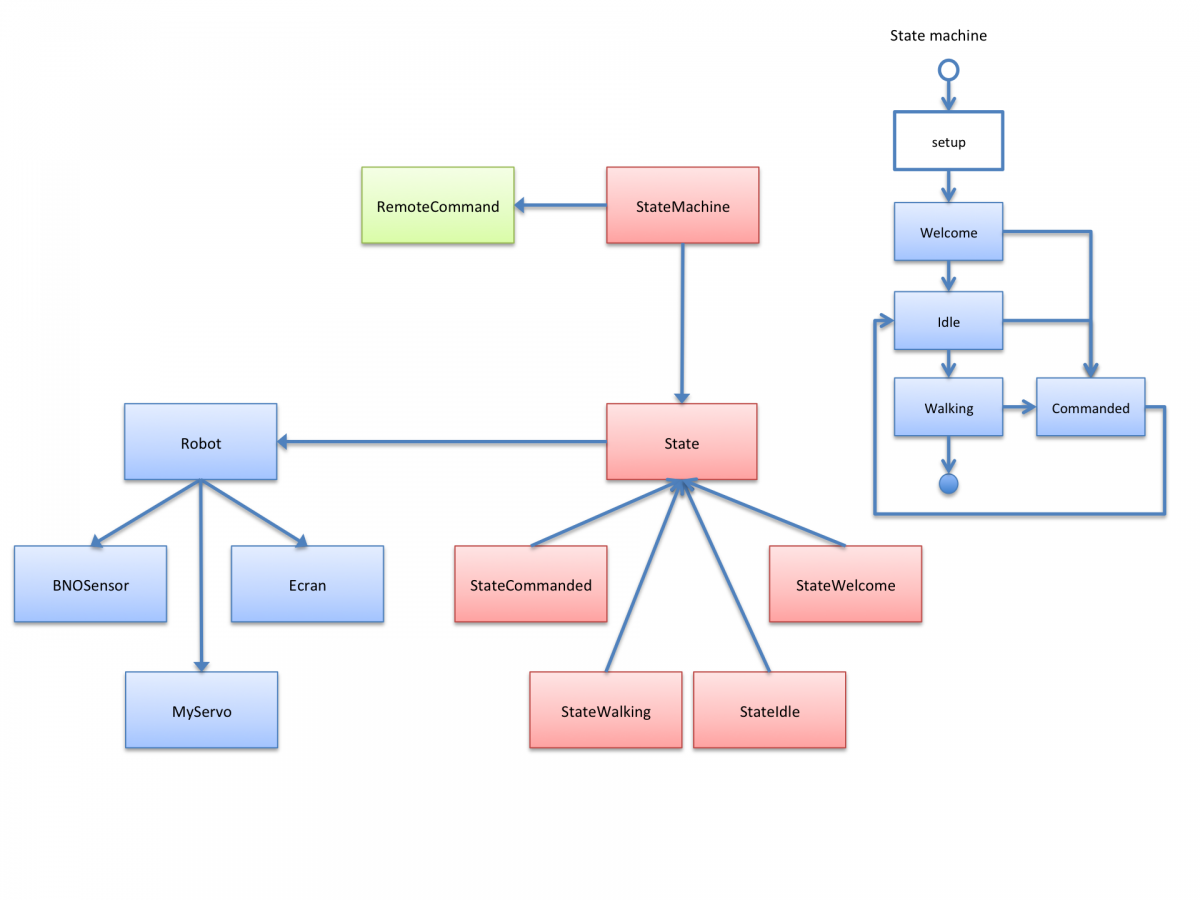
On a donc un programme constitué d'une commande, d'une machine à états et d'un robot (pilote les moteurs, accède aux capteurs et à l'écran) :
https://github.com/P...aster/emile.ino
PS. Le raspberry n'est pas monté sur le robot. Il fait partie de la plateforme de dev. Le robot est relié à sa plateforme de dev via le cordon usb.
Made By Humans
Posté 12 mars 2017 - 08:51
J'ai appris un truc au sujet du arduino mega 2560. Il reset automatiquement dès qu'on s'y connecte via USB. C'est pratique pour uploader le programme. Mais c'est beaucoup moins pratique pour le commander via ce même lien USB.
Une solution pour retirer le reset automatique consiste à ouvrir "reset_en" sur la carte. Mais cela oblige à appuyer sur le bouton reset pour le programmer.
A priori, je ne vais pas ouvrir "reset_en". Je trouve tellement pratique de programmer l'arduino avec le pi et de le commander par usb.
Mon montage préféré ne fonctionne pas directement sur la mega. Quelqu'un a une idée ?
Pilier du forum

Posté 12 mars 2017 - 09:08
Made By Humans
Posté 12 mars 2017 - 09:22
Je peux aussi utiliser les autres Serial1 à Serial3 ...
Je n'ai pas trouvé de solution simple. Je ne vais pas dessouder de résistance non plus Comme proposé là : http://playground.arduino.cc/Main/DisablingAutoResetOnSerialConnection
Merci Ashira, j'ai pas tellement envie d'en ajouter sur le robot (sauf si je trouve pas mieux). Du moins, si j'en ajoute, ce sera pour lui donner un récepteur radio, avec l'avantage d'enlever les câbles.
Made By Humans
Posté 12 mars 2017 - 11:18
Déjà, faisons le bouger un peu. Avant d'aller plus loin.Staff Robot Maker

Posté 12 mars 2017 - 11:24
Qu'est ce qui est le plus génant pour toi avec ceux réset à chaque connection ?
Si tu met un tout petit moment où tu ne fias rien sur la méga au début de ton programme,
Quand tu allumes ton robot, la pi se connecte directement sur la mega, et la réset, puis ensuite l'arduino se lance; et comme la pi ne se déconnecte plus ensuite pas de problème de réset.
Qu'en pense tu ?
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Made By Humans
Posté 12 mars 2017 - 11:38
ça fait du bien de partager ses pb ^^
Staff Robot Maker
Posté 12 mars 2017 - 11:42
Exactement ! Tu laisses la com ouverte tout le temps Et plus de problème ! ( C'est pas comme si je faisais déjà exactement pareille sur mes projets  x) )
x) )
Et quand c'est critique j'utilise les autre serial. Par contre quand tu commenceras à rencontrer des problèmes pense à mettre un watchdog
N'hésite pas à continuer de poser tes questions ça aide toute la communauté
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné

Posté 13 mars 2017 - 08:21
Donc, émile a plusieurs états de fonctionnement. Un état "walking" et un état "commanded".
ça c'est bien vu, bonne idée
Made By Humans
Posté 13 mars 2017 - 09:38
Made By Humans
Posté 19 mars 2017 - 09:35
J'ai fini la commande. Je vais peaufiner un peu mais c'est là. La structure du programme est celle que je présentai un peu plus haut.
Le code est là : https://github.com/Path000/emile
La commande consiste à prendre la main sur le fonctionnement par défaut d'Émile. La commande est une interface web exposée par un raspberry. Ce raspberry pilote le mega du robot par un câble usb.








0 members, 0 guests, 0 anonymous users




