Beau boulot !

Prototype robot humanoïd
Débuté par Computer Mail, févr. 16 2017 10:24
95 réponses à ce sujet
#41

Oracid
-

- Modérateur
-

- 6â¯768 messages
Pilier du forum
- Gender:Male
#42
Leon
-

- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 02 mars 2017 - 07:43
Je viens de le terminer mais la simulation ne se lance pas, un problème de nombre d'objets trop important certainement. Je dois tout recommencer il y a un tas d'endroit où je pourrais optimiser, ce serait bien d'en profiter pour tester un autre simulateur en connaîtriez-vous d'autres pas mal ?
Du coup, tu as résolu ton problème? C'était quoi? Ca peut être utile de partager ses erreurs sur ce forum, ça aidera certainement d'autres personnes.
C'est ce que j'ai essayé de faire il y a quelques années tout au long de mon projet BOB4, le drone autonome d'intérieur.
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#43
Computer Mail
-
- Membres
- 45 messages
Membre
Posté 02 mars 2017 - 08:43
Oui un trop grand nombre d'objets, le problème était que j'utilisais que le Link appelé Hinge pour lier les différentsmembres, seulement maintenant que je les ai remplacés par des Ball et des Universal je m'aperçois que ces Link ne peuvent pas être mis en mouvement avec les moteurs donc je ne peux pas contrôler les membres concernés, je crois que je vais aller directement au réel.
#44
Path
-

- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 02 mars 2017 - 09:11
Sauf erreur d'appréciation, je vois qu'il n'est pas possible d'avoir la version complète en évaluation, pour cette simulation j'aurais inconditionnellement besoin d'un capteur caméra, s'il n'est pas présent ça posera problème, je vais plutôt continuer sur marilou, merci quand même.
Si tu ouvres la version PRO EDU là : http://www.coppeliarobotics.com/downloads.html
Le licence agreement affiche
The V-REP PRO EDU educational license applies ONLY to EDUCATIONAL ENTITIES composed by following people and institutions:
1. Hobbyists, students, teachers and professors2. Schools and universities
Après, si tu fais ça dans le cadre pro, tu dois avoir les moyens de financer tes licences.
#45
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 02 mars 2017 - 09:19
seulement maintenant que je les ai remplacés par des Ball et des Universal je m'aperçois que ces Link ne peuvent pas être mis en mouvement avec les moteurs donc je ne peux pas contrôler les membres concernés, je crois que je vais aller directement au réel.
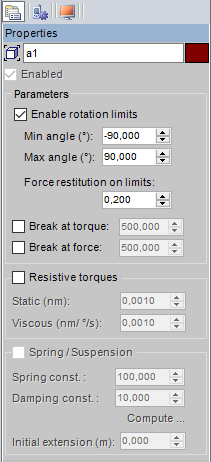
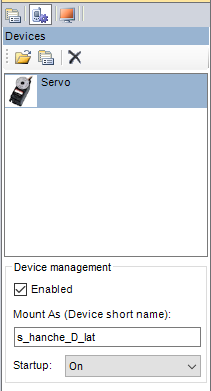
J'ai un peu bidouillé Marilou, et je peux t'assurer que tu peux parfaitement mettre des actionneurs derrière les articulations "Universal". Dans l'édition de l'articulation à 2 axes (universal), pour activer chacun des 2 actionneurs, il faut cliquer sur chacun des 2 vecteurs, les axes. Puis une fois que tu es dans l'édition des axes, tu cliques sur l'icone "device" en haut.
C'est naturellement ce que j'ai utilisé pour simuler les hanches de BOB5 : articulation "universal".
Voici avec des captures d'écran :
Articulation universal:
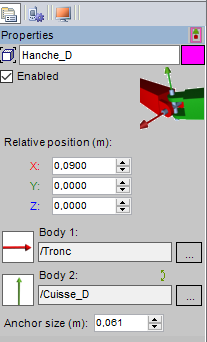
Puis édition d'un des 2 axes (cliquer sur le vecteur vert ou rouge)
Puis édition du moteur de l'axe (cliquer sur 'device' en haut).
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#46
Computer Mail
-
- Membres
- 45 messages
Membre
Posté 03 mars 2017 - 12:28
Merci du tuyau, j'imagine que les Link Ball eux ne peuvent pas être motorisés ? J'ai quand même à rajouter 18 objets en espérant que ça réussisse à se lancer ainsi.
#47
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 03 mars 2017 - 09:04
Merci du tuyau, j'imagine que les Link Ball eux ne peuvent pas être motorisés ?
Je ne sais pas. Le plus simple, pour répondre à ce genre de question, c'est de tester sur un cas simple de liaison entre 2 objets, avant de t'embarquer dans la modélisation de ton robot à 50 degrés de liberté.
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#48
Computer Mail
-
- Membres
- 45 messages
Membre
Posté 03 mars 2017 - 12:27
Je l'ai fais, pas de motorisation possible, mais est-il possible de simuler quand même ce moteur simulé d'une manière simple ?
#49
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 04 mars 2017 - 06:42
mais est-il possible de simuler quand même ce moteur simulé d'une manière simple ?
Personnellement, je n'ai pas compris la question. Peux-tu reformuler, si tu veux que j'y réponde?
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#50
Computer Mail
-
- Membres
- 45 messages
Membre
Posté 04 mars 2017 - 08:34
De ce que j'ai vu il n'est pas possible d'attacher un moteur au Link Ball, est-il tout de même possible de le mettre en mouvement, en somme de simuler un moteur ?
#51
R1D1
-

- Modérateur
-
- 1â¯211 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 06 mars 2017 - 06:42
Ah ... content de savoir que ma thèse et mon job ne servent à rien ... Je savais bien que j'aurais dû faire Pizzaiolo !Dans la mesure où cette I.A est appelée à adopter non uniquement des comportements préprogrammés mais surtout ceux qu'elle aura appris, pas grand chose n'était à coder. Pour plus de détails la vidéo sera plus parlante.
Trouverais-tu que ça sent le sapin ?Wahou M. Mail !! T'es à block !!

V-REP est effectivement utilisable en complet pour usage personnel (et ça peut servir à faire les premiers développements quitte à prendre une licence ensuite).
De manière plus rigoureuse, l'article suivant fait un tour des solutions utilisées par la communauté des chercheurs pour leurs traavux sur les humanoïdes : https://hal.inria.fr...116148/document(en anglais).
#52
Computer Mail
-
- Membres
- 45 messages
Membre
Posté 06 mars 2017 - 11:56
Merci pour cette réponse je vais donc essayer sur V-REP.
#53
Computer Mail
-
- Membres
- 45 messages
Membre
Posté 18 mars 2017 - 09:07
Annonce: connaîtriez-vous un servomoteur sous les 100 euros plus puissant que celui-ci https://hobbyking.com/en_us/robostar-sbrs-5314htg-280-digital-metal-gear-high-voltage-robot-servo-53-1kg-0-14sec-81g.html
#54
Telson
-

- Membres
-
- 975 messages
Membre chevronné
- Gender:Male
- Location:Punaauai - Tahiti
#55
Computer Mail
-
- Membres
- 45 messages
Membre
Posté 23 mars 2017 - 04:56
Merci, bon je n'ai pas su trouver mieux à moins de 100 euros mais si je considère le moteur le plus puissant étant 50kg.cm 60rpm je peux quasiment diviser le poids annoncé initialement (25kg) par deux, je n'ai plus qu'a jouer un peu sur la taille du robot et le tour est joué. Le système d'exploitation est terminé je n'ai plus qu'a incorporer les périphériques en commençant par la caméra http://www.robotshop.com/en/arducam-640x480-03-mp-lens-ov7675-cmos-camera-module-w--adapter-board.html, j'ai aussi une datasheet fournis avec http://www.robotshop.com/media/files/pdf2/rb-adu-07_datasheet.pdf, des connaisseurs pourraient-ils me confirmer qu'elle est suffisante pour écrire le pilote de la camera ?
#56
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 23 mars 2017 - 05:37
 T'as codé un système d'exploitation ? Mais fais tourner. ça m'intéresse !! C'est sur quelle machine ? codé en quoi ?
T'as codé un système d'exploitation ? Mais fais tourner. ça m'intéresse !! C'est sur quelle machine ? codé en quoi ?
#57
Computer Mail
-
- Membres
- 45 messages
Membre
Posté 23 mars 2017 - 05:52
Il passe en long mode, peut lire et écrire des données n'importe où sur le disque dur et dans la RAM, tourne sur une architecture x86-64 et est codé 100% en assembleur. Je n'ai pas besoin de plus pour mon projet.
#58
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 23 mars 2017 - 06:41
Il passe en long mode, peut lire et écrire des données n'importe où sur le disque dur et dans la RAM, tourne sur une architecture x86-64 et est codé 100% en assembleur. Je n'ai pas besoin de plus pour mon projet.
Peux-tu stp nous dire ce que tu entends par "système d'exploitation"? Cette dénomination peut cacher plein de choses différentes qui n'ont rien à voir les unes avec les autres. Donc si tu pouvais être plus précis...
A moins que ça soit secret et que tu ne veuilles pas partager, comme quand je t'ai demandé ce que tu entendais par "Intelligence artificielle"...
Sinon, où en es-tu de la simulation 3D de ton robot avec ton IA codée en 1 semaine ?
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#59
Computer Mail
-
- Membres
- 45 messages
Membre
Posté 23 mars 2017 - 06:57
La simulation a donné des résultats.
Ce que j'entends par intelligence artificielle je pense l'avoir déjà introduit plus tôt, le robot sera capable d'assimiler tout seul, il aura bien entendu des actions primaires dans certaines situations que par abus de langage je pourrais nommer réflexes qui guideront ses comportements vers une entière autonomie.
Pour moi un programme qui se lance sans système d'exploitation est un système d'exploitation.
#60
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 23 mars 2017 - 07:09
La simulation a donné des résultats.
Etrange, tu nous avais dit que tu partagerais une vidéo dès que tu aurais des résultats. On attend ça avec impatience.
Pour moi un programme qui se lance sans système d'exploitation est un système d'exploitation.
Oh, c'te blague! Tu as égayé ma soirée, merci.
On rigole bien chez toi!
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)








0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




