Bonjour,
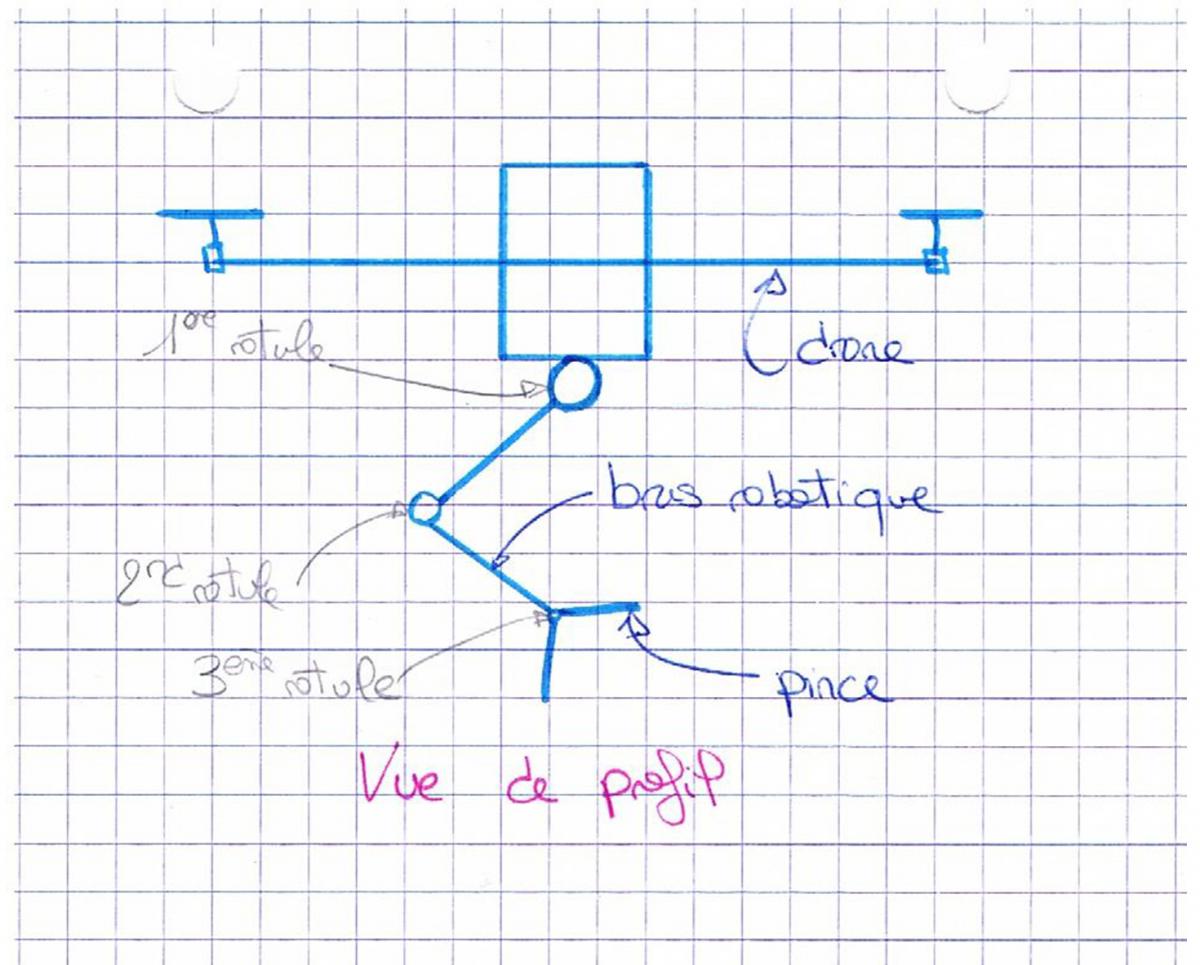
j'ai en projet de construire un drone, à ceci prêt que j'aimerai lui incorporer, en dessous, un bras mécanique articulé pour prendre et déposer des objets légers (de 50g à 300/400g).
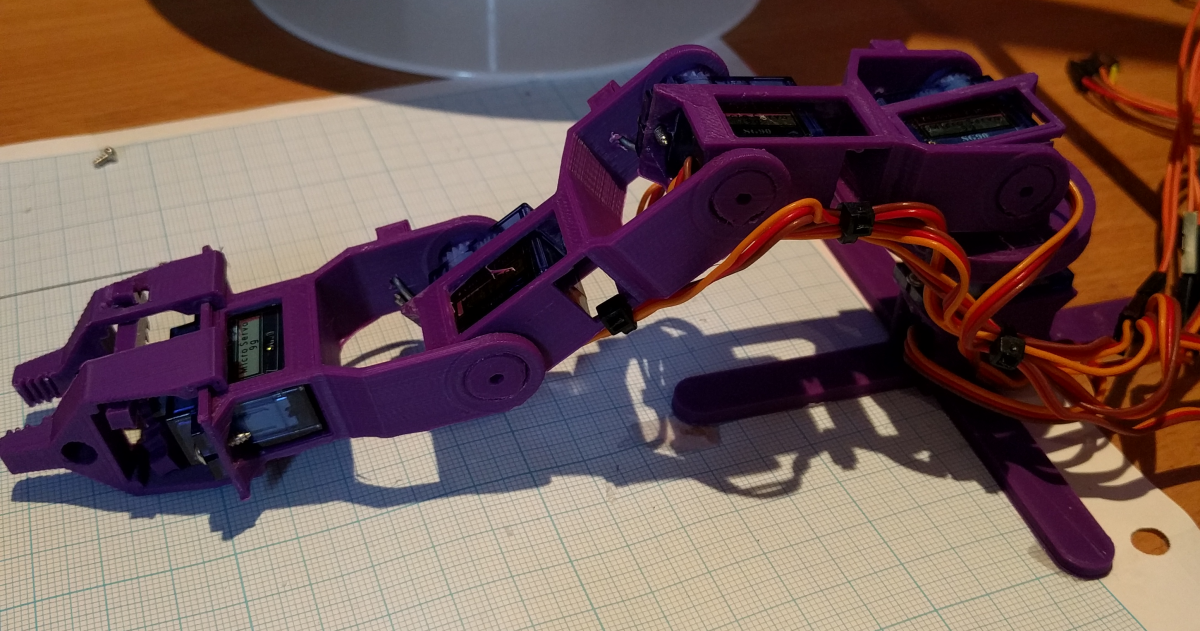
J'ai déjà déterminé les caractéristiques du drone (elles peuvent encore varier mais si je reste dans la configuration actuelle, cela m'arrangerai) pour que ce dernier puisse soulever un bras robotique (BR*) de 0.8kg environ. Ce poids est inspiré d'une pince robotique à vendre dont les caractéristiques me semble intéressantes comme base d'approche (lien en fin de post).
Le BR* devra détecter une forme d'objet pré-définie, appréhender cet objet, se mettre en position verticale, puis relâcher l'objet.
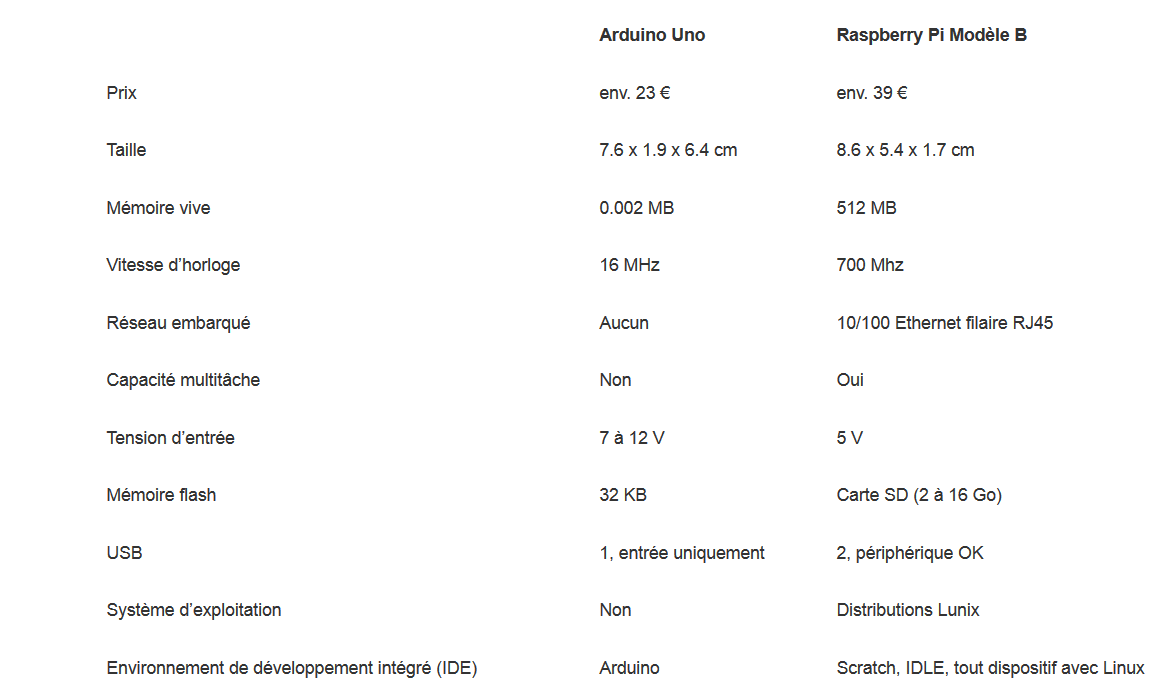
N'ayant aucune connaissance dans le domaine de la robotique (électronique et programmation), serait-il possible, dans un premier temps, de m'orienter vers les termes/notions/fonctions/composants de bases à savoir en rapport avec la fabrication d'un BR*?
Armé de ces nouveaux acquis, je pourrai parler techniquement et rentrer dans le vif du sujet plus facilement avec vous! 
Merci d'avance pour vos suggestions! 
Bras robotique pris en exemple:
http://www.robotshop.com/eu/fr/bras-robotique-arduino-braccio.html



 Je te laisse regarder ce qui se fait pour ce genre de chose =)
Je te laisse regarder ce qui se fait pour ce genre de chose =)