Cool !
Par contre la consommation du Lidar n'est t'elle pas un problème pour l'autonomie de la batterie du robot ?

 5 note(s)
5 note(s)
Mes robots web sécurisés avec accès publique !
Débuté par Serveurperso, avril 08 2017 02:43
Robot Node.js Serveur Web UHF Faible latence Radioamateur PIC32 HTML5 H.264
245 réponses à ce sujet
#221

gerardosamara
-

- Membres
-

- 374 messages
Membre passionné
- Gender:Male
- Location:Costa Rica & Bretagne
Posté 01 mars 2018 - 08:18
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#222
Mike118
-

- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 01 mars 2018 - 09:55
Le lidar ne consomma pas tant que ça...
Il est spécifié 1,5A mais il ne les consomme pas en continue...
Avec une batterie 2200 mAh tu tiens pas mal de temps... Je dirais que pascal arrive à s'amuser comme un petit fou avec mon robil et sa batterie lipo 3S 2200mAh pendant au moins environ 40 min il me semble ( à confirmer à l'occasion)... Et il maltraite les moteurs sans pitié... x)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#223
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 01 mars 2018 - 10:00
J'ajoute qu'il consomme 100mA en veille. Et le robot comporte une mise en veille quand il bouge pas depuis N minutes.
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#224
Mike118
-
- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 01 mars 2018 - 11:06
Et c'est encore moins un problème quand Robil se range dans sa base de recharge ! ( Oups j'ai spoil une nouveauté !  il faut vraiment que je prenne le temps de mettre à jour mon blog ! )
il faut vraiment que je prenne le temps de mettre à jour mon blog ! )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#225
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 01 mars 2018 - 01:54
Il faut qu'il s'y range tout seul en autopilote maintenant jojo
moi j'ai fini le passage en H.264 du gros robot ! J'ai appliqué le correctif sur nos 2 petits robot même si c'est pas visible (car pas de background de page)
moi j'ai fini le passage en H.264 du gros robot ! J'ai appliqué le correctif sur nos 2 petits robot même si c'est pas visible (car pas de background de page)
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#226
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 02 mars 2018 - 10:31
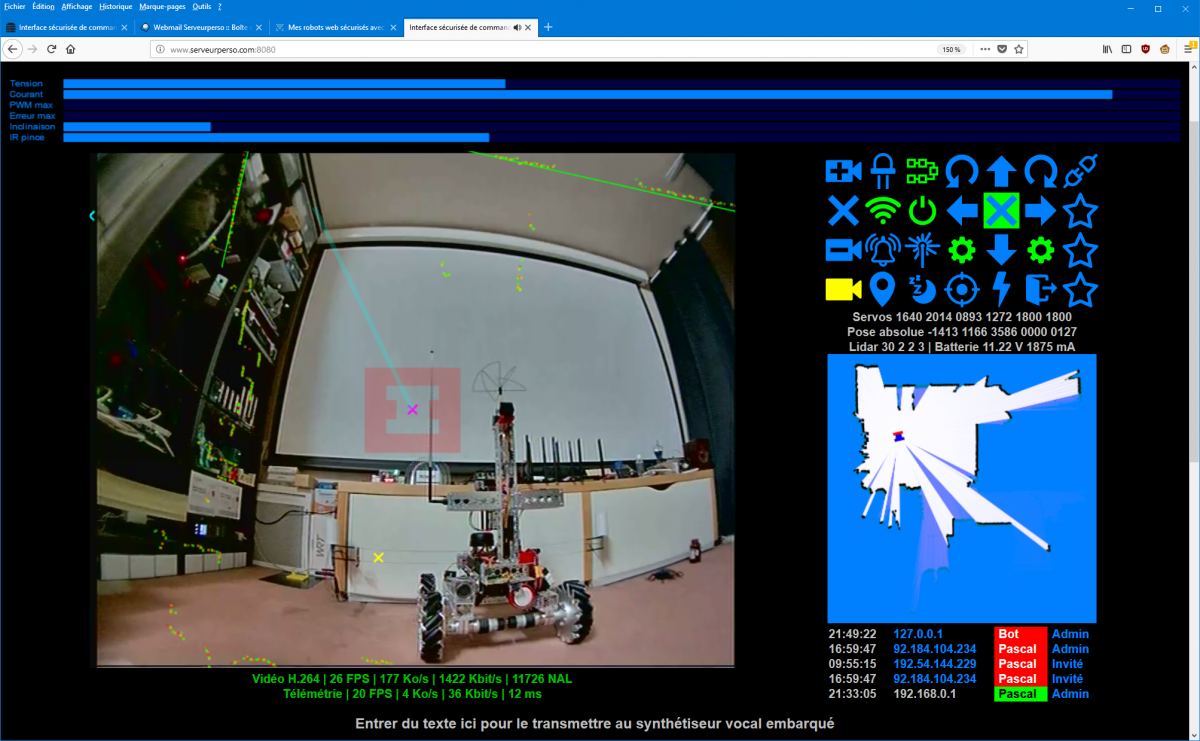
Hop j'ai mis un mode replay de lecture en boucle de la dernière utilisation des robots du coup ça fait de la vie h24 sur les pages:)
https://www.serveurp...com/?page=robot
http://www.serveurperso.com:8080/
- ashira aime ceci
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#227
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 08 avril 2018 - 06:48
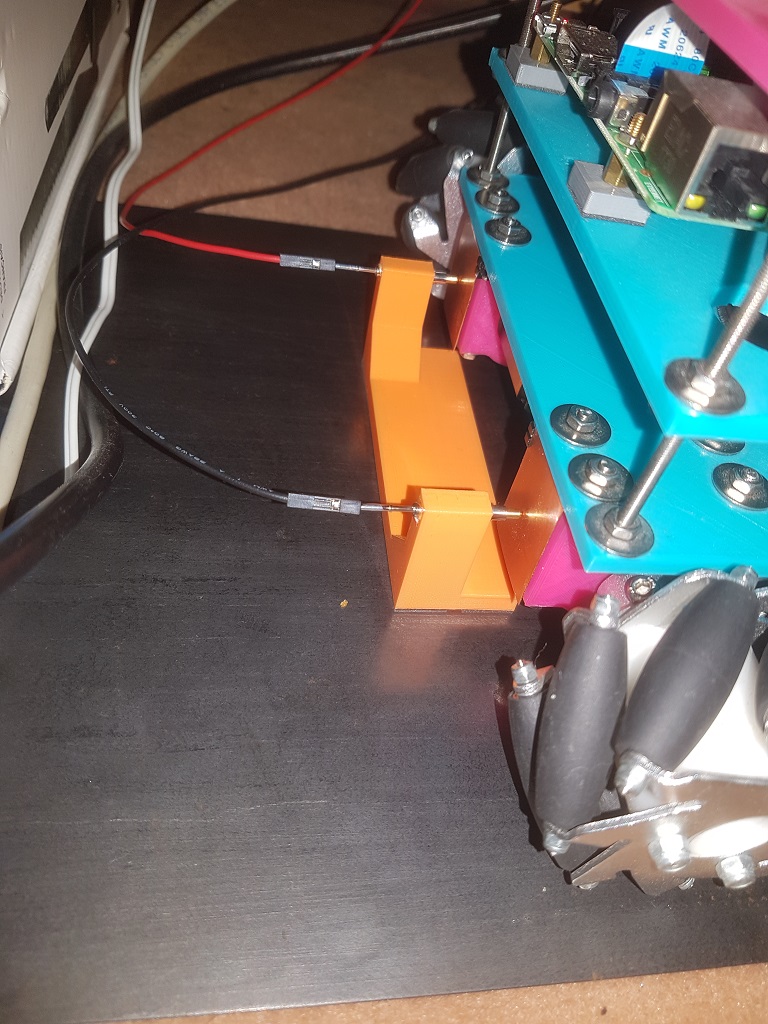
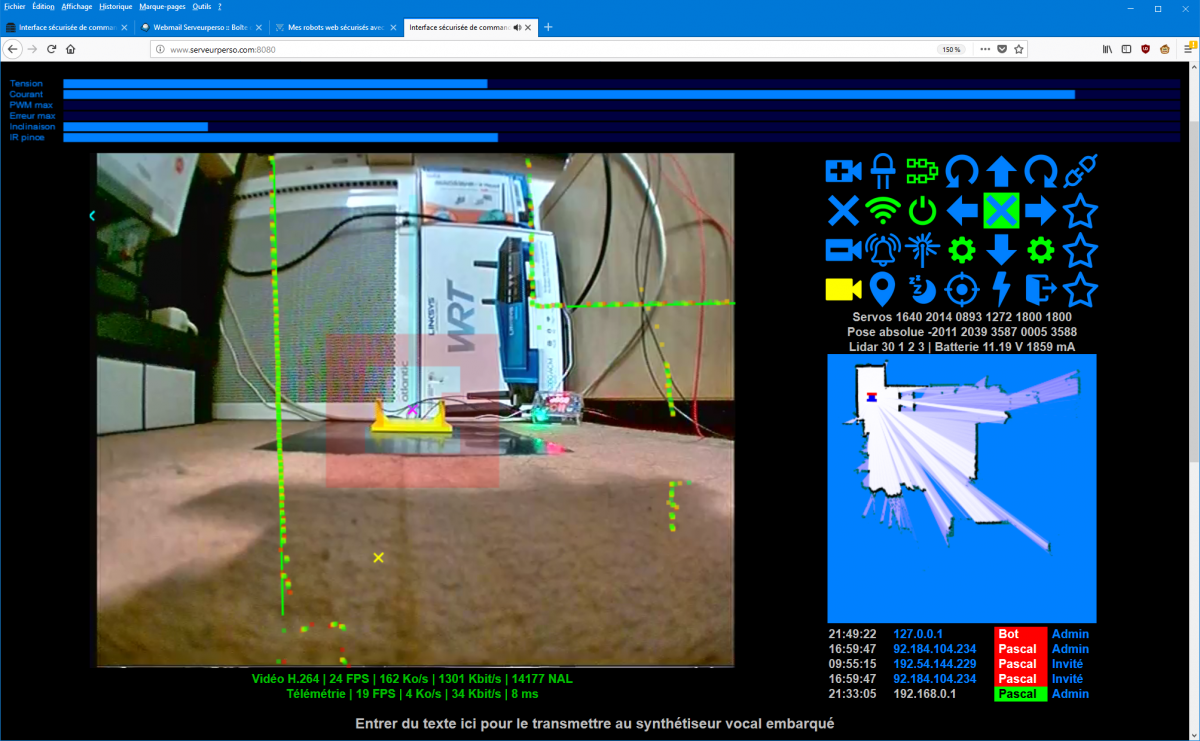
Enfin la base de recharge du petit robot terminée, contact cuivre avec de simples broches pogo.
La localisation du robot est assez précise pour se positionner systématiquement au même endroit et les contacts à ressort font le reste



Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#228
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 29 mai 2018 - 09:10
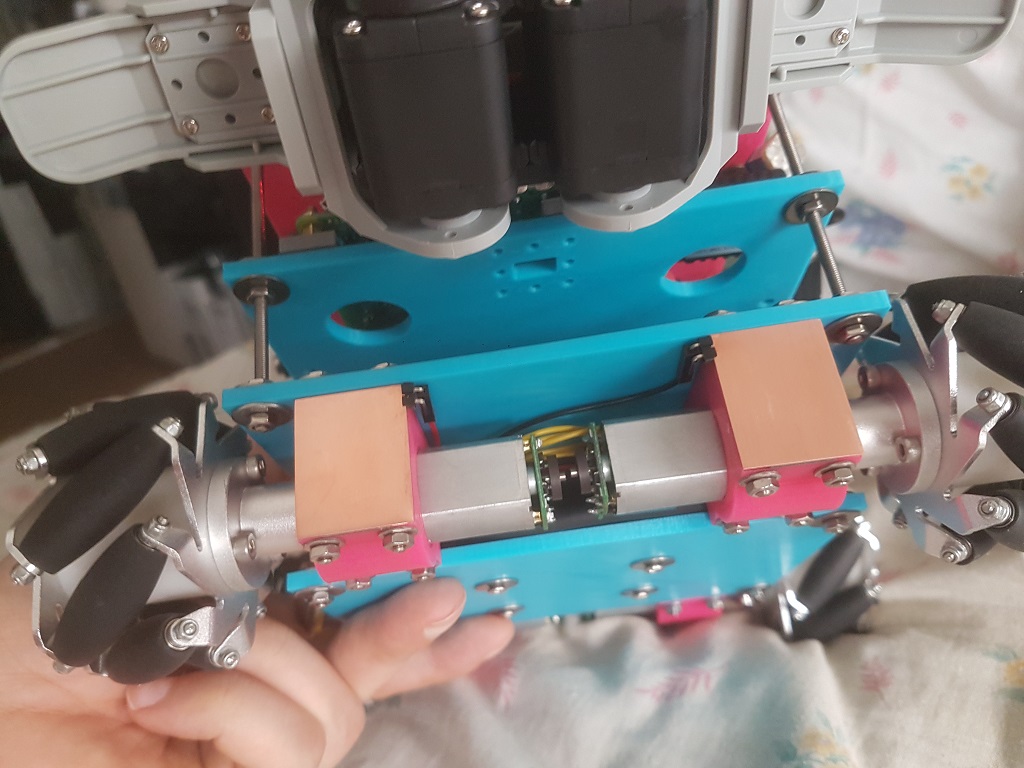
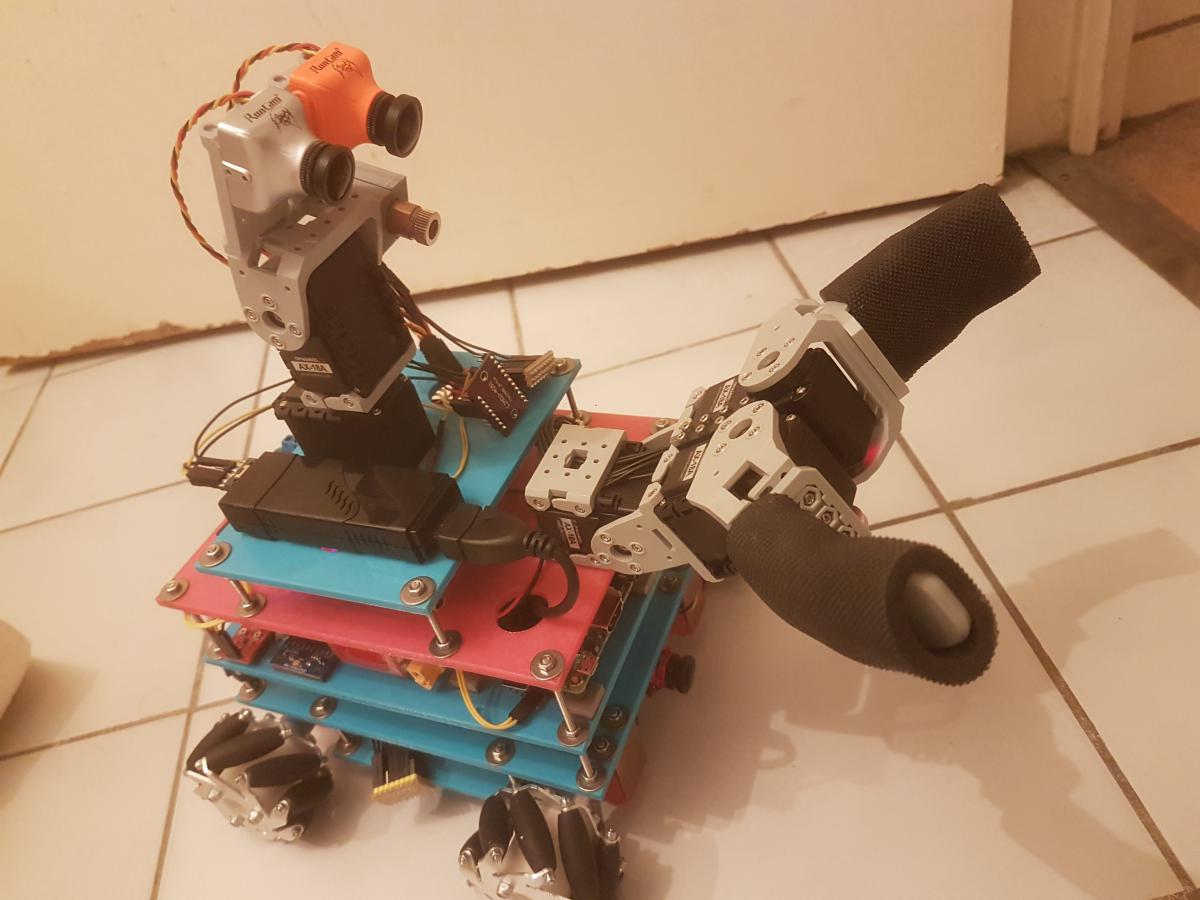
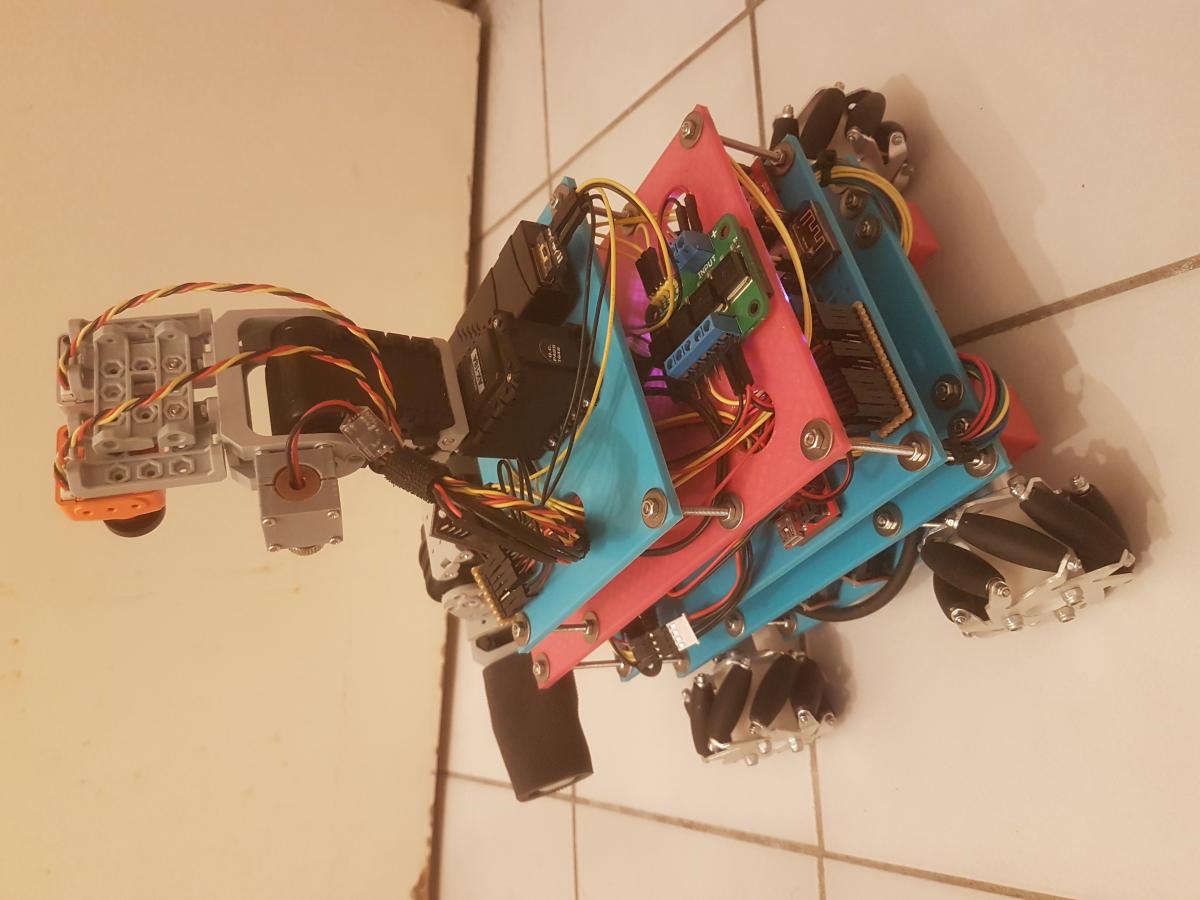
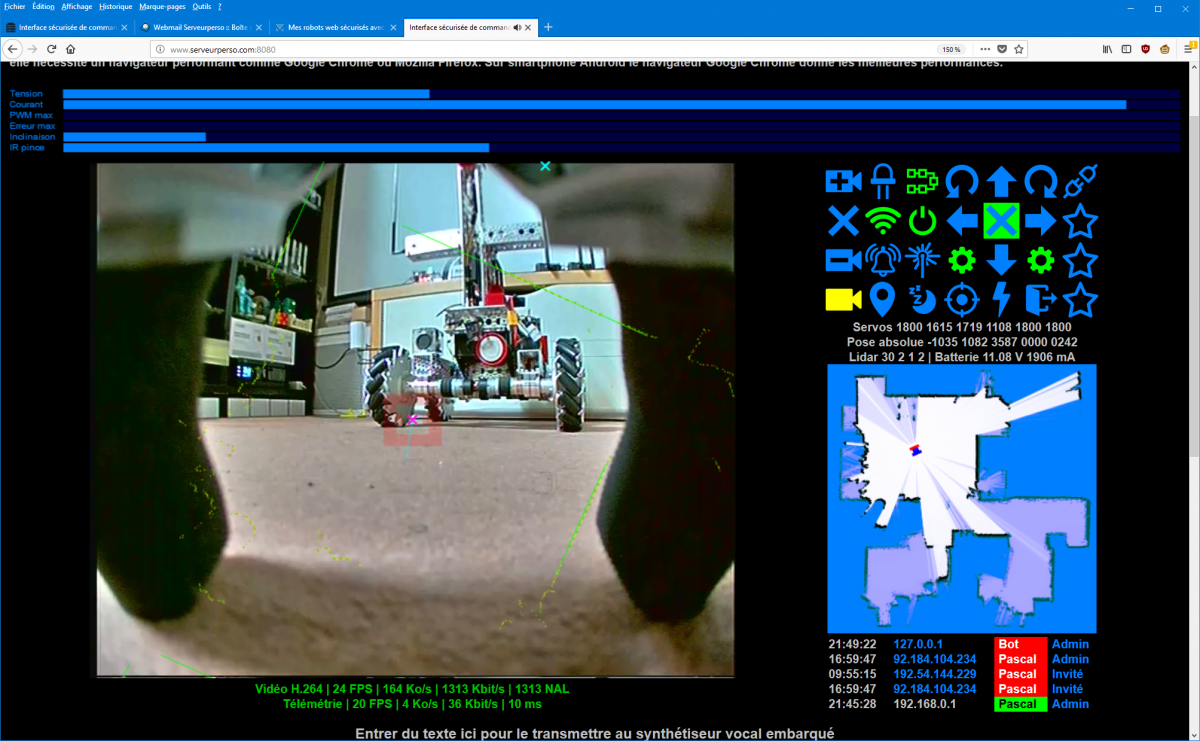
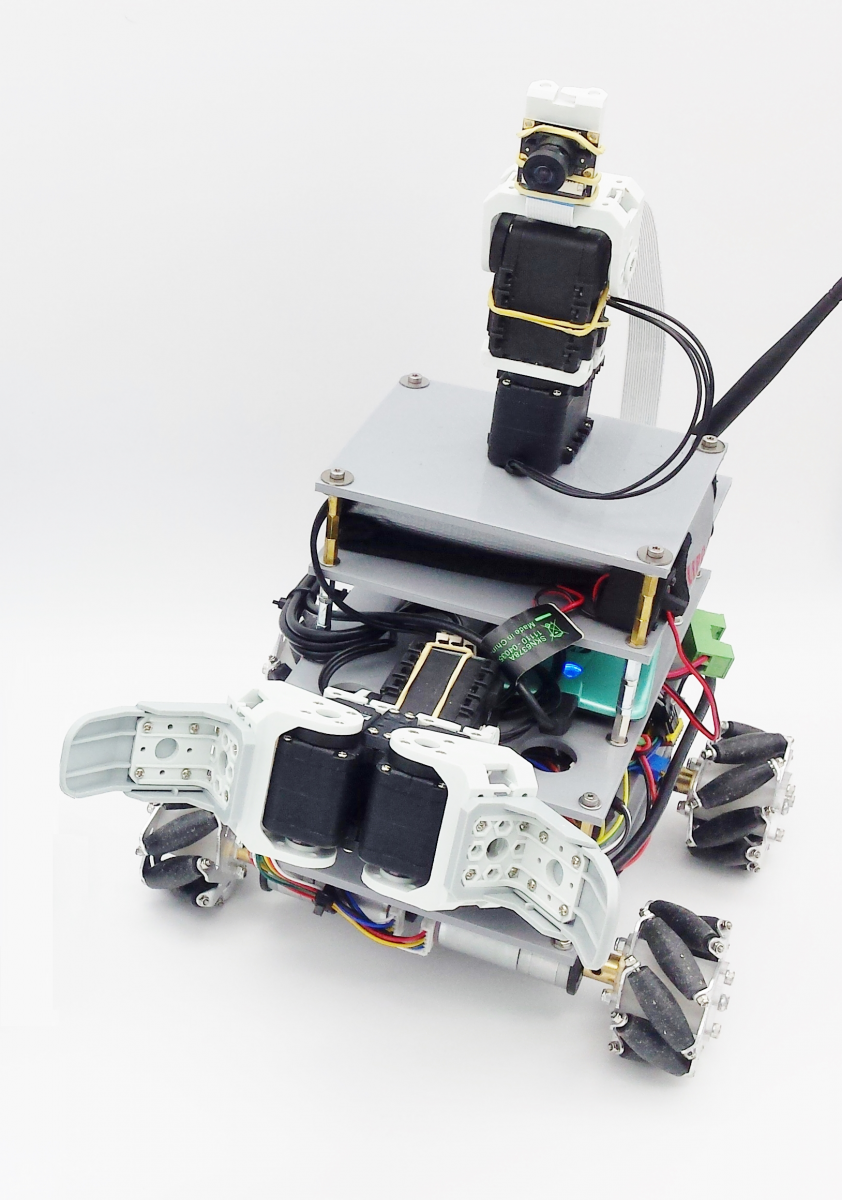
Hop upgrade du petit robot :
Caoutchouc très souple de poignée VTT lol la pince peux transporter une canette de 33cl tout comme le gros robot (approche les limites du centre de gravité)
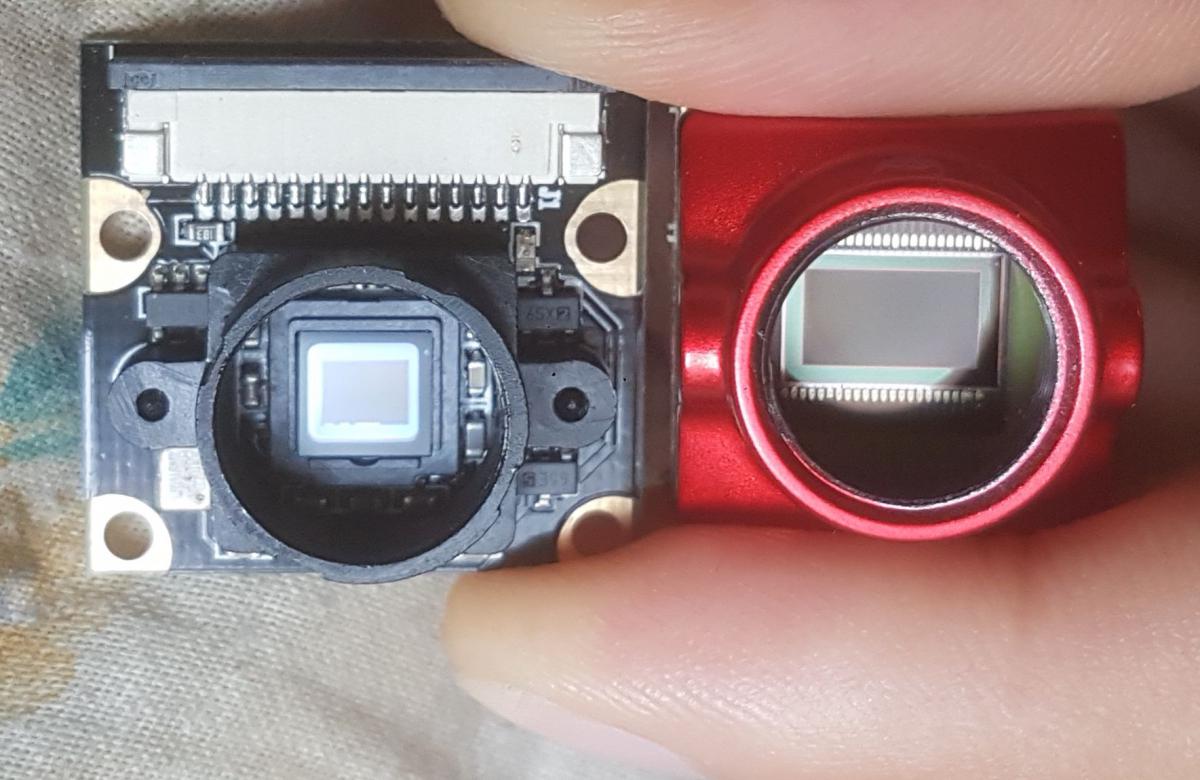
Passage à des tailles de capteurs et ouverture d'objectif plus importantes avec gain d'amplification vidéo incomparable avec la Raspicam :
Taille du capteur- raspicam à gauche lol:
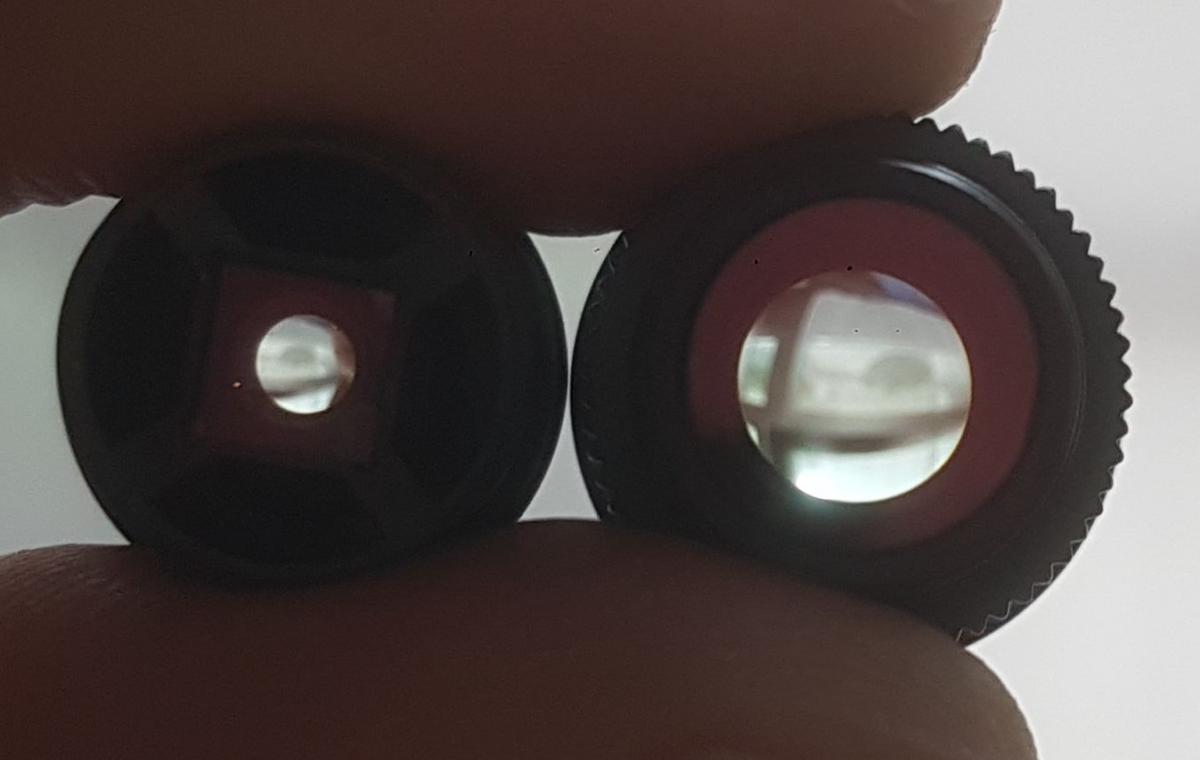
Ouverture d'objectif- raspicam à gauche mdr :
Le robot est enfin utilisable à la lumière tamisée (couleur) et dans le noir complet (caméra type astronomie capteur noir et blanc et sans IR block) :
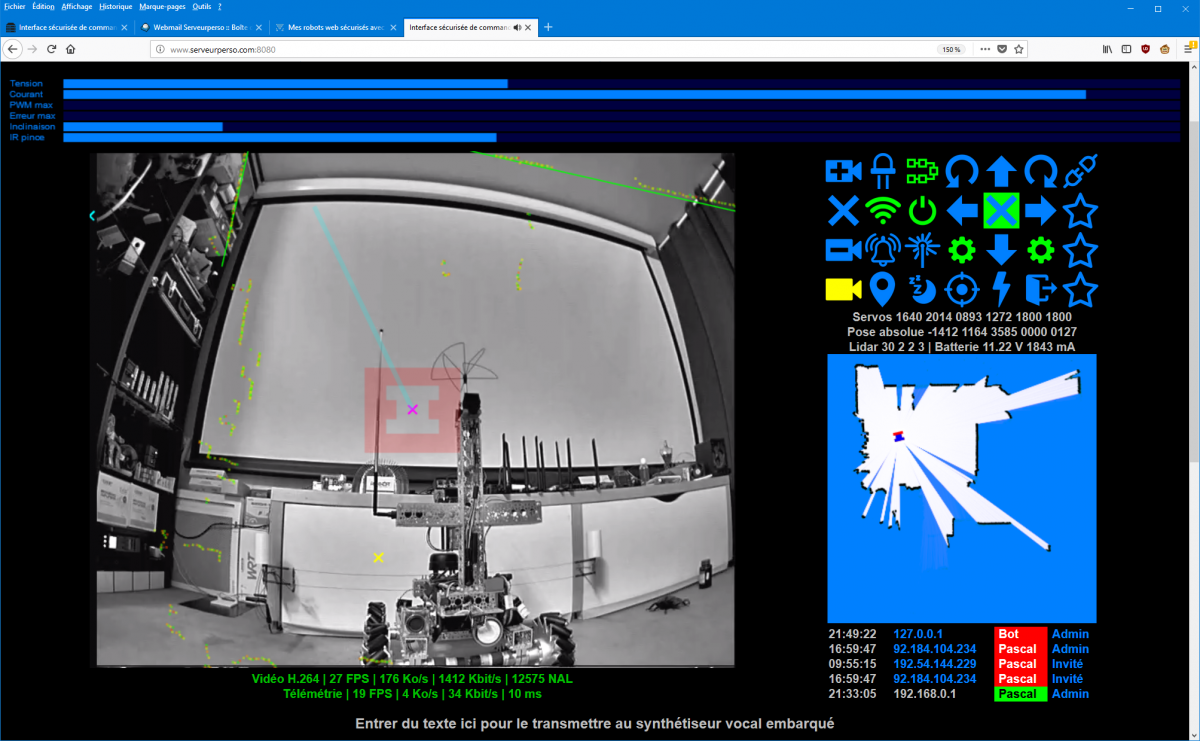
Couleur et avec vrais grand angle 170 degrés :
Une caméra en dessous pour voir la pince :
J'utilise donc des caméras analogiques PAL/NTSC (configurées en PAL car meilleure résolution) et le signal est numérisé par une carte USB qui comporte un dé-entrelaceur matériel ce qui double la résolution par rapport a pas mal (voir la totalité) des vidéo DVR de downlink bruts de drone qu'on vois sur youtube. J'utilise toujours le GPU de la PI pour l'encodage vidéo à faible latence ça pompe a peine plus de CPU qu'avant.
Vu l'utilisation vidéo H.264 Baseline décompressée par du JavaScript sur le client, c'est aussi bon que la raspicam en pleine lumière sauf que le choix de caméras beaucoup plus performantes à basse lumière est enfin possible (CCD Super HAD 2 pour la sensibilité ou grands capteur CMOS pour la plage dynamique...) et surtout, il est facile d'utiliser un simple multiplexeur pour switcher la vidéo sur un nombre "illimité" de caméras:D
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#229
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 29 mai 2018 - 09:22
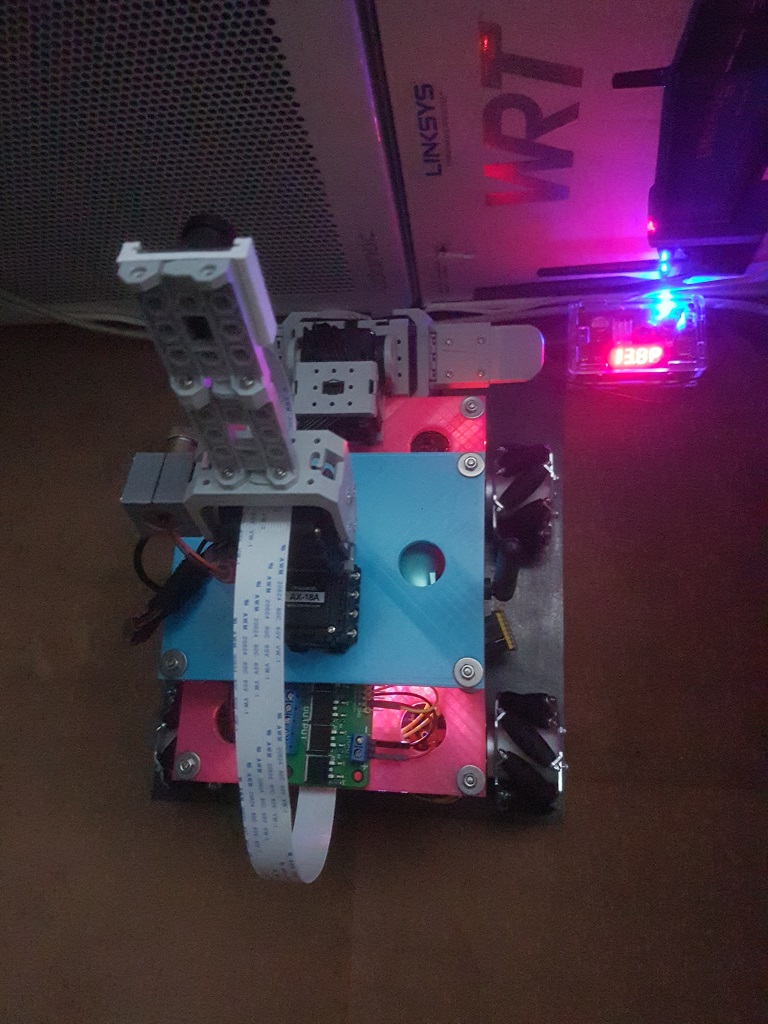
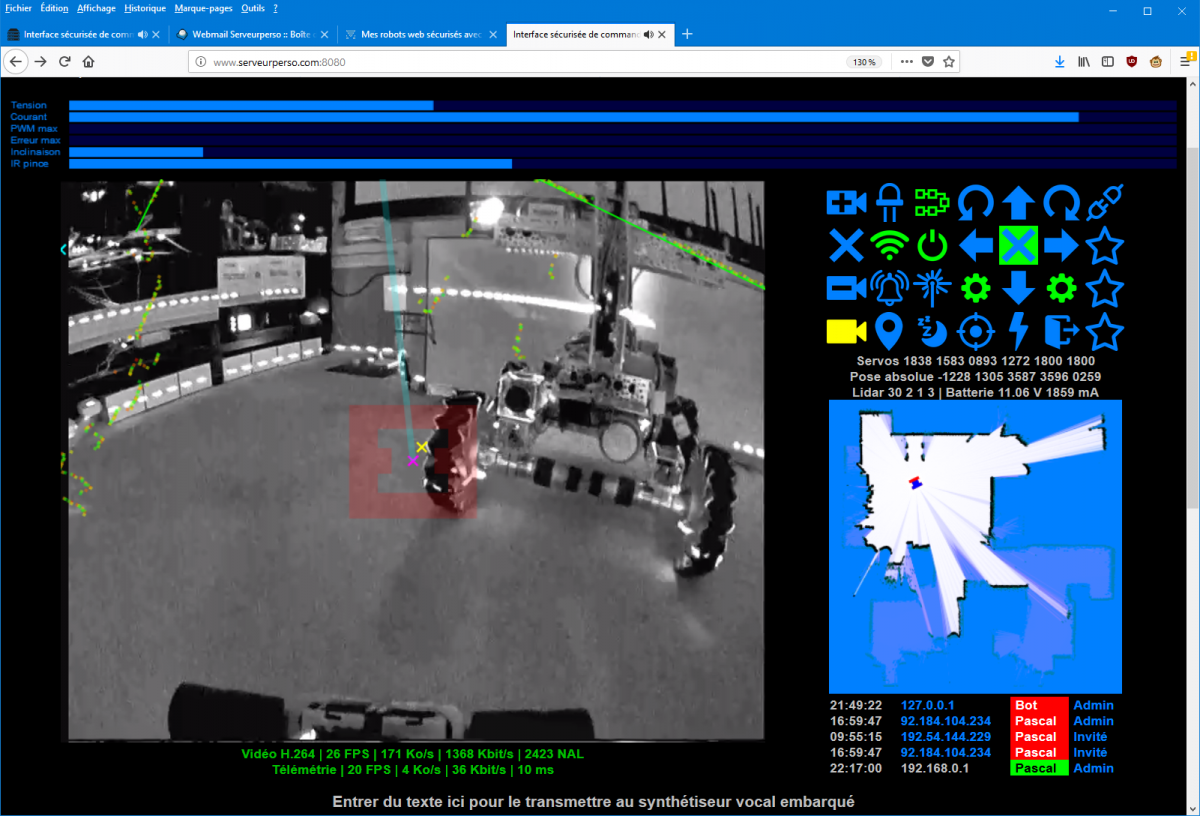
Et voila dans le noir complet, adieu la doublette de LED infrarouge de raspicam qui chauffent à mort pour y voir pas grand chose et avec un angle trop étroit.
Le laser du lidar et les voyants du matos suffisent à éclairer tout une pièce, cette caméra peux voir la lumière des étoiles 

- Oliver17 aime ceci
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#230
Oliver17
-

- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male

#231
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 29 mai 2018 - 10:57
Super
Ça m'intéresse bien ton histoire de caméra...Je ne suis pas encore à la partie vidéo, loin de la même, mais bon, j'aime anticiper
Mais je vois que tu a deux caméras sur ton robot, pour la vision stéréoscopique ?
Pour de la stéréoscopie j'aurais mis exactement les 2 mêmes "avec des numéros de séries qui se suivent"  trop maniaque:D
trop maniaque:D
Comme j'ai écris ya une noir et blanc type astronomie + non IR-bloquée et une couleur.
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#232
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
Posté 30 mai 2018 - 07:39
Ok et tu n'aurais pas pu intégrer ce genre de chose pour passer de la couleur au noir et blanc et ainsi supprimer une caméra ?? :
https://fr.aliexpres....27426c37euEJHJ
Ashira m'avait montré ce système.
Il avait déjà testé plusieurs caméras, il serait peut être bon à l'occasion d'ouvrir un post sur toutes ces petites caméras et faire une sorte de comparatif, car je me doute bien que ma picam ne m'offrira peut être pas ce que je recherche.
Ceci dis, même si la Raspicam te semble nettement moins performante (et je ne doute pas de tes propos), elle a l'avantage tout de même de posséder ce système jour/nuit par capteur ou manuellement, et pour les I.R. (là je rejoins ton opinion ils ont l'air de faire plus jolie qu'autre chose), il faut placer des dissipateurs de chaleur à l'arrière et ça chauffe beaucoup moins ^^
En tous cas ils sont toujours aussi délirant tes robots 
#233
Mike118
-
- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 30 mai 2018 - 07:48
Robil est limite jaloux !
Sa nouvelle base de recharge c'est pas suffisant pour lui !
Et il veux lui aussi plus de capteur et un laser sur la tête ! ( Oui juste dans la pince ne lui suffit plus x) )
Heureusement les prochains upgrades prévu sont :
Ajout d'une caméra thermique, d'une camera pixy, et d'une camera IR
Ajout de 3 télémètres : 1 sur la tête , 1 sur la pince, 1 à l'avant du robot
Ajout d'un petit pointeur laser sur la tête et d'une led puissante
Le but faire en sorte qu'il puisse capter son environnement et aller tout seul chercher une balle de telle couleur, la ramener à une personne, et plus encore =)
ROBIL va prendre la grosse tête ^^
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#234
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 30 mai 2018 - 08:31
Ok et tu n'aurais pas pu intégrer ce genre de chose pour passer de la couleur au noir et blanc et ainsi supprimer une caméra ?? :
https://fr.aliexpres....27426c37euEJHJ
Ashira m'avait montré ce système.
Il avait déjà testé plusieurs caméras, il serait peut être bon à l'occasion d'ouvrir un post sur toutes ces petites caméras et faire une sorte de comparatif, car je me doute bien que ma picam ne m'offrira peut être pas ce que je recherche.
Ceci dis, même si la Raspicam te semble nettement moins performante (et je ne doute pas de tes propos), elle a l'avantage tout de même de posséder ce système jour/nuit par capteur ou manuellement, et pour les I.R. (là je rejoins ton opinion ils ont l'air de faire plus jolie qu'autre chose), il faut placer des dissipateurs de chaleur à l'arrière et ça chauffe beaucoup moins ^^
En tous cas ils sont toujours aussi délirant tes robots
J'ai plusieurs de ce genre de truc - IR-cut filter amovibles montés sur solénoïdes - cependant ça monte pas sur les caméras aux capteurs plus grands ni les caméras avec des bonnes ouvertures d'objectifs...
Le 1/1.8" CMOS couleur avec son fitlre IR-cut est beaucoup beaucoup plus sensible que la raspicam NO-IR (sans filtre). Et surtout :
- Un capteur CMOS noir et blanc 1/1.8" est beaucoup beaucoup plus sensible qu'un 1/3" CCD Super HAD2 Couleur qui est lui même beaucoup beaucoup plus sensible qu'un capteur CMOS Couleur 1/1.8" (pourtant plus grand que le CCD HAD2) qui est beaucoup beaucoup plus sensible que le capteur rikiki CMOS couleur du genre raspicam.
Quand je dit "beaucoup beaucoup" ya aucune exagération ce sont des ordres de grandeurs de > * 10 ou * 100 lux et c'est le jours et la nuit entre les 4 modèles possibles.
- 0.000005 lux pour la CMOS noir et blanc @ 25FPS
- ? lux le CCD Super HAD 2
- ? lux le Grand CMOS couleur
- 1 lux pour la raspicam et ce certainement pas à 25FPS
En ajoutant les infrarouges à n'importe quel capteurs couleur on n'augmente que légèrement les performances en basse lumières.
C'est utile uniquement avec une source d'illumination infrarouges....
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#235
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
Posté 30 mai 2018 - 09:02
Effectivement, tu a fais beaucoup beaucoup de recherche
C'est super intéressant, j'espère ne pas oublier toutes tes recherches (ouais j'ai une mémoire de poisson rouge).
Le moment venu, j'espère que tu pourras intervenir sur le post de Glenn si je venais à changer de caméra, mais j'expliquerai cela plus en détail sur mes attentes.
Merci ^^
- Serveurperso aime ceci
#236
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 19 août 2018 - 10:06
Et la je suis sur une remise en question de la Raspberry PI (3 / 3+) que je vais garder exclusivement pour usage avec RaspiCam et pas pour faire de l'acquisition en RAW sur port USB car je suis a la limite au niveau perf et impossible d'obtenir l'audio USB correctement avec la vidéo YUV qui tire à plus de 100Mo/sec.
Un mini robot est en construction sans lidar, sans PID roues, 100% Raspberry PI, avec un pan&tilt à la tête !
Du coup j'ai commandé une ODROID XU4Q - la version fanless de la XU4 dont la partie aluminimum est bien trop faiblarde, je prefère ajouter un ventilo lent sur ma XU4Q car ça chauffe pas mal! mais c'est une petite bombe en performance elle sera dédiée au robots avec plus d'une seule caméra avec les mêmes performance et faible latence que le gros robot initial.
Conf logicielle validée & montage in progress sur "Ptibot", celui avec la pince et les 3 caméras.
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#237
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
Posté 19 août 2018 - 10:58
A l'occasion (normalement il doit y avoir un post sur les nanoPC), si tu veux nous en dire plus donc sur ce nanoPC, du moins ton ressentit comparer à d'autres (un peu comme tu l'a fais avec la pi), ce serait cool
Car nous sommes nombreux à utiliser le même matériel (Pi, arduino...), souvent du à une communauté importante sur ces cartes, mais il existe mieux j'en suis sur qu'une Pi ou Arduino (genre ESP32 en remplacement d'arduino : https://projetsdiy.f...ts-connectes/).
Donc merci d'avance
#238
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 19 août 2018 - 12:07
C'est toujours la même chose avec plus ou moins de puissance et plus ou moins de périphérique et I/O et plus ou moins de communauté donc de support technique. Les gens ont peur de changer mais Linux reste Linux et un microcontrôleur reste un microcontrôleur.
En vrac :
Avec la ODROID adieu le Wi-Fi intégré, adieu le DAC (sortie son, ya un port I2S inutilisé), un port USB de moins mais :
Bonjour l'USB3 et le Gigabit Ethernet (pas utile sur mon projet)
Bonjour la puissance supplémentaire, facteur entre 5 et 10 versus une PI3
La XU4Q dispose d'un port microSD avec un interrupteur qui permet de passer sur un port eMMC, une petite carte avec une puce flash pour avoir de meilleurs perfs en I/O système de fichier... j'ai pris une 16Go ça coute dans les 40 euros je crois, plus cher qu'une microSD mais conçu pour être plus solide dans le temps.
Les connectique sont sur les 2 longs côté donc c'est chiant par rapport à la PI qui sort en ligne mais c'est un détail suffit de réorganiser l'espace sur le robot...
Niveau logiciel j'utilise que des distribs minimalistes du genre Debian Netinstall, et ce partout, aussi bien sur PC que sur mes cartes headless (sans écrans)
J'ai claqué la distrib ARMBIAN sur la puce eMMC à l'aide d'un adaptateur compatible microSD vendu sur le site de hardkernel et d'autres.
ça boot, le service SSH est déjà prêt suffit de brancher sur le réseau et retrouver l'IP DHCP.
Direct je fait mon git init dans /etc (git et build-essencial sont déjà préinstallés) pour suivre et avoir l'historique de commits en commits des moindres modifications de confs par moi ou les MAJ de paquets.
apt-get update/upgrade, un seul paquet à MAJ c'est bien maintenu ! la commande armbian-setup permet de configurer les params régionaux (locales) et le réseau en 2 secondes.
J'ai claqué nodejs et c'est partit, le tout en moins d'une heure
- Oliver17 aime ceci
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#239
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
#240
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 19 août 2018 - 01:13
Voila c'est fini
https://www.serveurp...com/?page=robot
Cliquer sur "Ptibot" et bouger la caméra pour le voir fonctionner.
En quelques heures j'ai refait l'OS et porté l'application PI -> ODROID
L'audio est maintenant nickel, et la vidéo top fluide (car la PI avais vraiment du mal à tenir le 100Mo/sec sur l'USB) et latence au niveau d'une raspberry+PIcam
Sauf que la j'encode le H.264 logiciellement -> futur évolution voir si je peux utiliser le GPU pour encore réduire la conso.
En parlant de conso je ne visualise pas d'augmentation par rapport a la PI
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : Robot, Node.js, Serveur, Web, UHF, Faible latence, Radioamateur, PIC32, HTML5, H.264




0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




