La station de charge c'était plus urgent que tout. Maintenant fini le branchement manuel du robot tout les soirs. et j'ai poussé la mise en veille à 4 minutes c'est plus confortable que les 50 secondes d'avant.
En parallèle avec le tangent bug qui est pas mal commencé, j'ai envie de créer une carte PIC32MX voir MZ dédié localisation monte carlos.
Avec en entrée une bascule pour passer du mode exploration (génération de la carte) au mode localisation monte carlos sur cette même carte.
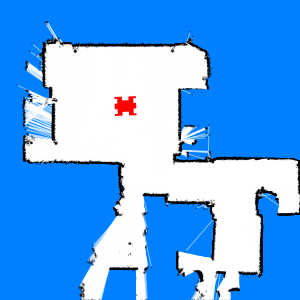
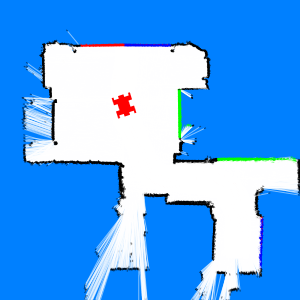
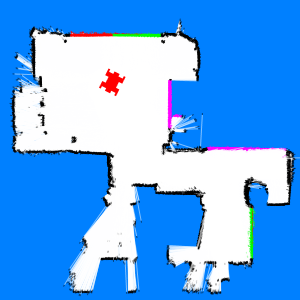
En mode exploration (learning) ça génière une grille d'occupation dans la mémoire du PIC32 à l'aide du positionnement odométrique aproximatif mais très correct sur un aller retour d'appart (on le vois bien sur la petite carte du site qu'il est possible de faire générer très précise des chiottes à la chambre en s'y prenant bien)
En mode localisation monte carlos on récupère les coordonées absolue de cette petite carte.
Du coup on a du positionnement absolu, avec une petite erreur répétable (la carte odométrique initiale)
Du coup il peux revenir en charge
Du coup ça devient encore plus intéressant d'avoir le path planning tangent bug:)
ça fait comme du SLAM mais sans mathématique ultra gourmandes en CPU (EKF ICP et autres)
ça me permet de rester sur du microcontrôleur en C bas niveau ultra fiable bien pépère qui boot en 0 secondes et conso rien