Fais pareil avec le PQ, on ne sait jamais ^^

 5 note(s)
5 note(s)
Mes robots web sécurisés avec accès publique !
Débuté par Serveurperso, avril 08 2017 02:43
Robot Node.js Serveur Web UHF Faible latence Radioamateur PIC32 HTML5 H.264
245 réponses à ce sujet

#162

Serveurperso
-
- Membres
-

- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 27 septembre 2017 - 12:40
Le PQ c'est super léger pour le robot, mais la réserve est a portée de main du trône chez moi:)
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)


#164
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 30 septembre 2017 - 08:24
Fini ! Enfin techniquement je n'ai plus de développement PIC32 à faire pour qu'il me rapporte de la bouffe ou des boissons et retourne porter le déchet à la poubelle:)
La couche d'algo metaaction est terminée. Une metaaction est composée de plusieurs actions elles mêmes composées plusieurs mouvements.
Metaaction = mission en gros:)
- Mike118, ashira, macerobotics et 3 autres aiment ceci
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#165
ashira
-

- Modérateur
-
- 1â¯333 messages
Pilier du forum
- Gender:Male
Posté 30 septembre 2017 - 09:01
Beau travail! Il y a plus qu'à aller à la coupe de France^^
- Serveurperso aime ceci
#166
Budet
-

- Membres
-
- 366 messages
Membre passionné
- Gender:Male
- Location:69
#167
Oliver17
-

- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
#168
Ulysse
-

- Membres
-
- 486 messages
Membre passionné
- Gender:Not Telling
Posté 30 septembre 2017 - 10:20
Pardon de ne pas comprendre tous les termes utilisés. Si je déplace le tube d'aspirine un peu sur la gauche avant qu'il ne soit saisi ...
- l'objet est recherché par vision ?
- la pince ne détecte pas l'objet et la mission est abordée ?
- le mobile s'en va et continue la mission à vide ?
- l'objet est recherché par vision ?
- la pince ne détecte pas l'objet et la mission est abordée ?
- le mobile s'en va et continue la mission à vide ?
#169
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 30 septembre 2017 - 10:40
Le mobile s'en va et continue la mission à vide :
C'est juste un automate qui fait bouger la pince
C'est un PIC32 80MHz seul qui gère le robot, donc pas de computer vision.
Par contre je vais ajouter un ou des capteurs qui permettent des contrôles et automatismes de préhension au niveau de la pince
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#170
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 30 septembre 2017 - 10:43
Après avec une jevois il est possible de chercher des objets par vision mais le capteur et l'optique sont tellement pourri que c'est le noir absolu même tuné au mieux et lumières allumées. Idem pour une PI cam même et tunée et améliorée (grande optique CS) c'est carrément limite.
- ashira aime ceci
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)

 Félicitations !!
Félicitations !!
#172
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 01 octobre 2017 - 12:32
Et la fonction de tracé vectoriel au laser sur panneau photoluminescent.
Reste à coder la partie police vectorielle ou décodage de gcode ou n'importe quel autre format de dessin vectoriel léger
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#173
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 01 octobre 2017 - 12:35
J'ai refait la vidéo du post ci dessus avec une fonction propre de tracé d'équation paramétrique:)
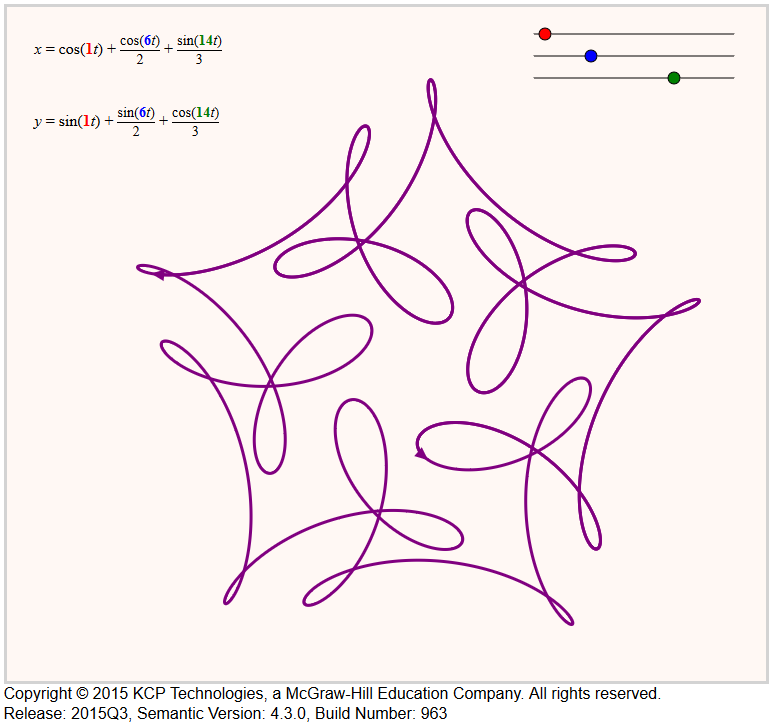
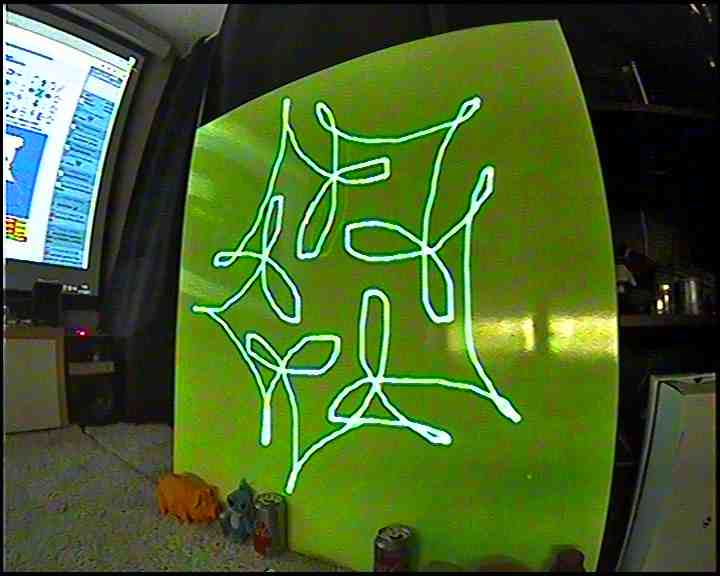
Il s'agit de l’équation avec les valeurs par défaut du site http://www.sineofthetimes.org/the-art-of-parametric-equations-2/
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#175
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 01 octobre 2017 - 04:54
Piloter comment ça ? l'alimentation -> une source de courant constant ou le mouvement -> la tourelle
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#177
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 01 octobre 2017 - 05:08
Ben le séquenceur de mouvement peux piloter n'importe quel organe du robot... donc les 2 servos X-Y de la tourelle... et le laser est fixé dessus avec les 3 caméras couleur et la caméra infrarouge...
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#179
Serveurperso
-
- Membres
-
- 417 messages
Membre passionné
- Gender:Male
- Location:Paris
Posté 01 octobre 2017 - 05:17
c'est incomparable en performances avec un vrais galvos closed loop de projecteur laser ILDA mais c'est rigolo.
ce sont les Dynamixel AX-18A
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#180
zavatha
-

- Membres
-
- 233 messages
Habitué
- Gender:Male
Posté 05 octobre 2017 - 07:09
Punaise je ne comprends pas tout quand tu parles mais il est clair que tu es une sacrée source d inspiration pour moi 🙌
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : Robot, Node.js, Serveur, Web, UHF, Faible latence, Radioamateur, PIC32, HTML5, H.264





0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




