Bonjour à tous, je suis face à une énigme, vous saurez peut-être m'en dépêtrer.
Le robot fonctionne aujourd'hui avec une batterie Lipo de 11,1v. Cette batterie alimente l'arduino nano et le driver L293 des deux moteurs DC (12v).
Un arduino nano peut recevoir les 11,1v via la pin Vin.
L'arduino est connecté a deux LEDs RGB, un buzzer, un servo moteur, un module Bluetooth HC-05.
Lorsque j'allume le robot, le code de l'arduino ne démarre pas, l'arduino clignote très rapidement, rien ne fonctionne.
Si j'allume le robot en débranchant le module Bluetooth HC-05, tout fonctionne, l'arduino démarre normalement excepté le Bluetooth débranché.
Si j'alimente le robot via l'usb de mon ordinateur directement à l'arduino, sans utiliser la batterie Lipo, tout fonctionne (le module Bluetooth marche) excepté mes moteurs qui ne sont plus alimentés en 12v.
J'en déduis qu'il y a une incompatibilité entre l'alimentation de 12v et le module Bluetooth HC-05. L'arduino sert d'interface entre les deux, que j'alimente l'arduino en 11,1v ou en 5v via l'usb ça ne devrait rien changer pour le module bluetooth...
J'ai réalisé un premier circuit imprimé qui comportait des erreurs, je n'avais pas encore compris que l'entrée Rx du module Bluetooth fonctionne en 3,3v plutôt qu'en 5v et que mes LEDs doivent recevoir un signal de 5v et renvoyer chaque couleur vers le ground plutôt que l'inverse.
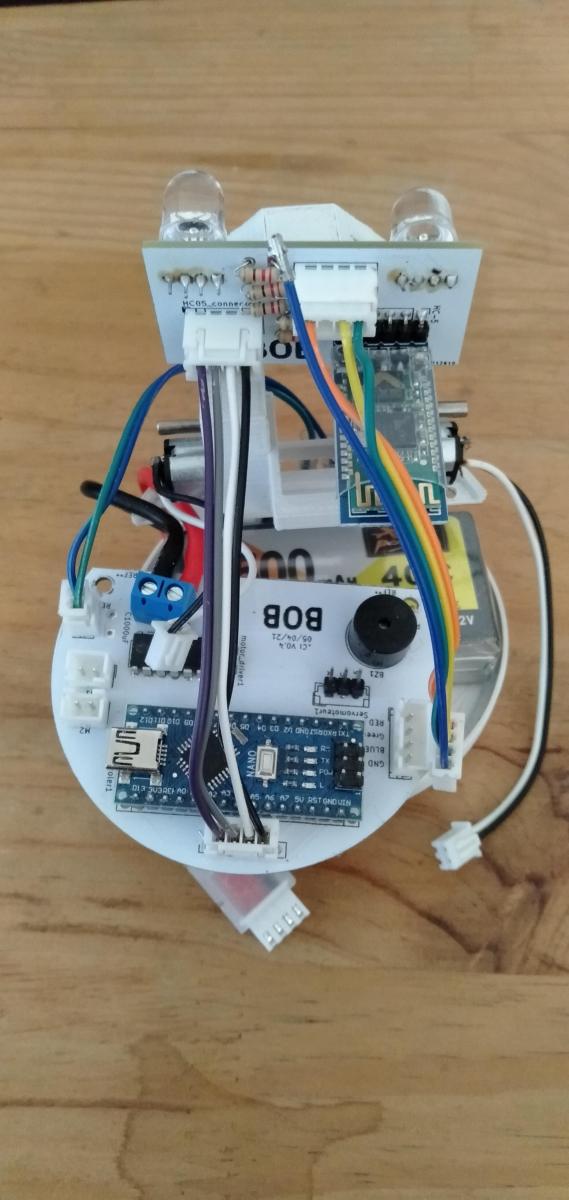
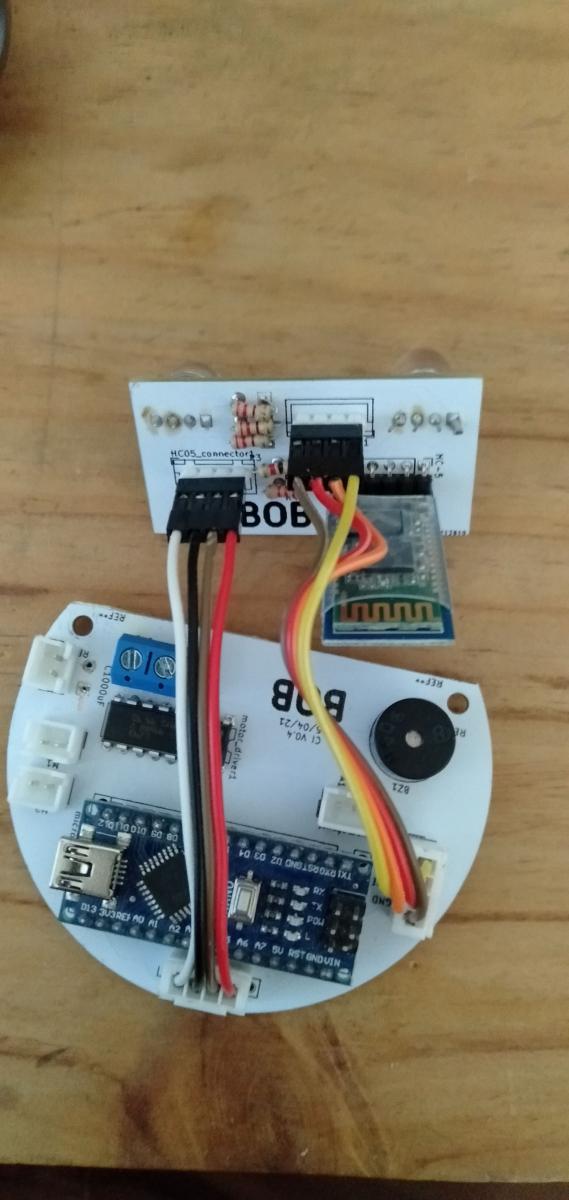
Du coup j'ai fait faire un autre petit circuit imprimé pour résoudre ces deux problèmes en même temps. Je réalise un pont diviseur pour l'entrée Rx du module Bluetooth et passe ainsi de 5v à 3,3v. Je vous joins mes deux schémas de circuit imprimé ainsi qu'une photo de mon installation.
Je suis au courant qu'il y a un gros problème de sécurité, je draine la batterie Lipo sans protection ce qui peut mener à sa destruction. Je dois ajouter une protection dans mon prochain circuit imprimé. Mais je ne veux pas faire un nouveau circuit imprimé sans comprendre les erreurs des circuits précédents.
Pour des raisons pratiques, je n'utilise pas le condensateur prévu au niveau de l'alimentation. Il est trop gros pour rentrer, il rentre en conflit avec les moteurs.
Je n'utilise pas non plus le sevo-moteur qui n'a pour le moment aucune utilité.




 Et maintenant vu l'expérience que tu as su acquérir sur ton projet tu peux même sans problèmes aider les débutants ! =)
Et maintenant vu l'expérience que tu as su acquérir sur ton projet tu peux même sans problèmes aider les débutants ! =)