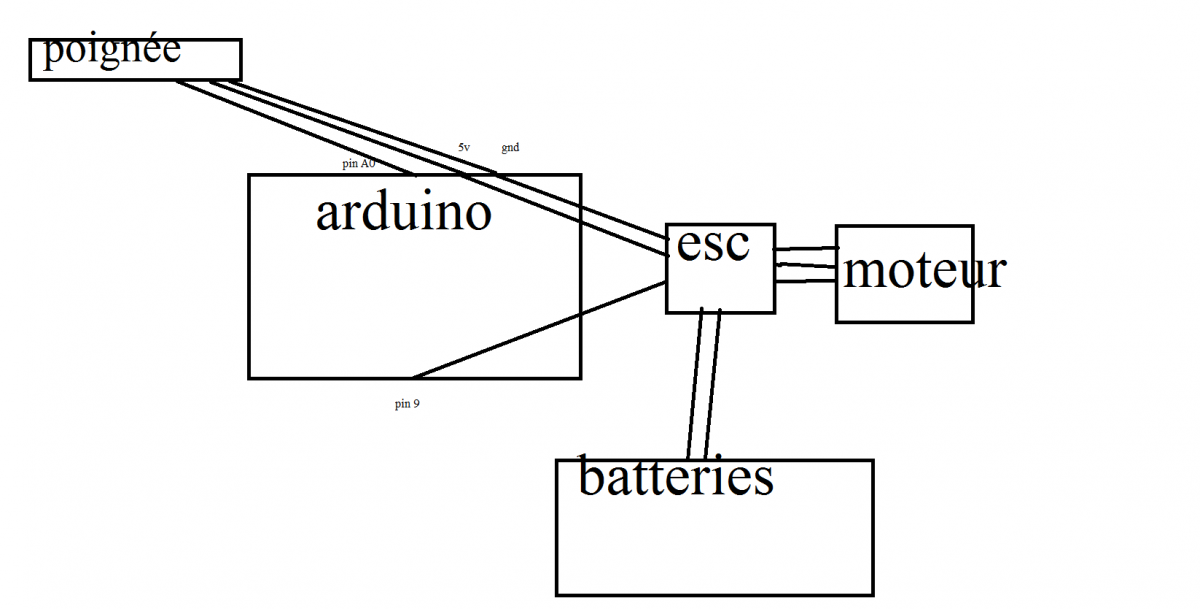
petit schéma fait à l'arrache


Conception d'un vélo électrique
Débuté par nekfury, août 27 2017 12:14
vélo électrique arduino code
33 réponses à ce sujet
#25

ashira
-

- Modérateur
-

- 1â¯333 messages
Pilier du forum
- Gender:Male
Posté 31 août 2017 - 04:39
Ok pour le schéma.
Il démarre et s’arrête à intervalle de temps régulier ou uniquement quand tu changes la position de la commande ?
Et si tu maintiens la position de la commande au moment où le moteur démarre, il s’arrête aussi ?
Si tu peux fait un scan ou photo de la notice.
#26
nekfury
-
- Membres
- 15 messages
Membre
Posté 31 août 2017 - 07:18
le temps avant qu'il s'arrête varie en fonction de la vitesse de rotation: plus il tourne vite, moins il tourne longtemps et inversement. je peux pas changer la vitesse de rotation : il tourne à la vitesse donnée par le premier "ordre" de la poignée puis garde la même vitesse.
donc même si je reste au même endroit avec la poignée, il s'arrête inévitablement après quelques tours.
ci joint la notice en pdf.
Fichier(s) joint(s)
-
 notice esc.pdf 1,27 Mo
238 téléchargement(s)
notice esc.pdf 1,27 Mo
238 téléchargement(s)
#28
maximusk
-

- Membres
-
- 304 messages
Membre passionné
- Gender:Male
- Location:Le Mans
Posté 31 août 2017 - 08:11
Tu peux peut-être essayer ça, je ne suis pas sur mais je crois comprendre qu'il faut maintenir l'accélération à 0 au démarrage. Pour des trucs aussi compliqués que des ESC, ils pourraient au moins fournir un manuel digne de ce nom...
#include <Servo.h>
Servo esc;
int throttlePin = 0;
void setup()
{
esc.attach(9,1000,2000);
esc.write(0)
delay(3000);
}
void loop()
{
int throttle = analogRead(throttlePin);
throttle = map(throttle, 0, 1023, 0, 179);
esc.write(throttle);
}
#29
cocothebo
-

- Membres
-
- 341 messages
Membre passionné
- Gender:Male
Posté 31 août 2017 - 08:18
Bonjour
D'habitude sur les ESC il ya une procédure de calibration qui est full gaz, attendre que ca "bip", gaz 0, attendre aussi que ca bip et hop c'est calibré.
Après normalement, il y a juste besoin de maintenir le 0 à chaque démarrage jusqu'à ce que ça bip pour pouvoir démarrer (sécurité pour éviter qu'une héllice démarre à la mise sous tension par exemple)
#30
nekfury
-
- Membres
- 15 messages
Membre
Posté 01 septembre 2017 - 01:57
ashira : 2 batteries lipo 4S 8000 mAh en série (pas 100% chargées, elles sont à env. 15v chacune)
maximusk : je vais essayer cette manipulation, d'ailleurs je suis complétement d'accord avec toi à propos de la notice très incomplète.
merci pour ton code, je vais l'essayer immédiatement.
cocothebo : à chacune des manipulations, j'attendais le bip avant de faire quoi que ce soit (j'ai un peu d'expérience avec l'aéromodélisme mais les manipulations sont plus simples avec un émetteur) et je vais essayer le technique du plein gaz.
#32
Centuri
-

- Membres
- 6 messages
Nouveau membre
- Gender:Male
- Location:Corsica
Posté 15 novembre 2017 - 02:10
Bonjour,
Bien que le protagoniste de ce post n'ai plus l'air de se manifester, je voudrais apporter ma petite contribution.
Je réalise le même projet et j'ai un peu avancé. La partie mécanique est opérationnelle, mon moteur est un Brusless disponible dans mon stock mais peut-être pas bien adapté car c'est un 620kv et il faudrait moins... Pour les premiers essai ça ira. Testé individuellement la partie mécanique semble bien fonctionner.
J'ai monté rapidement une carte UNO qui est censée commander mon ESC et mon moteur pour test.
La commande Utilisée est un levier qui se fixe sur le guidon et qui se comporte comme un potentiomètre. Il est alimenté en +5V et sort une tension comprise entre 0.85V et 4,28V (mesuré).
Ce système n'est pas un potentiomètre comme on pourrait le penser au premier abord, mais sûrement un capteur à effet Hall.
Le scketch Arduino est le suivant, et ça fonctionne parfaitement.
Il faudra peut-être affiner certaines valeurs dans la pratique.
Pour l'utilisation finale, je vais utiliser un Arduino Nano pour miniaturiser un peu.
Bien que le protagoniste de ce post n'ai plus l'air de se manifester, je voudrais apporter ma petite contribution.
Je réalise le même projet et j'ai un peu avancé. La partie mécanique est opérationnelle, mon moteur est un Brusless disponible dans mon stock mais peut-être pas bien adapté car c'est un 620kv et il faudrait moins... Pour les premiers essai ça ira. Testé individuellement la partie mécanique semble bien fonctionner.
J'ai monté rapidement une carte UNO qui est censée commander mon ESC et mon moteur pour test.
La commande Utilisée est un levier qui se fixe sur le guidon et qui se comporte comme un potentiomètre. Il est alimenté en +5V et sort une tension comprise entre 0.85V et 4,28V (mesuré).
Ce système n'est pas un potentiomètre comme on pourrait le penser au premier abord, mais sûrement un capteur à effet Hall.
Le scketch Arduino est le suivant, et ça fonctionne parfaitement.
#include <Servo.h>
Servo esc; //création objet servo pour controler le variateur
int pot = 0; //broche analogique utilisée pour le potentiomètre
int val; // variable utilisée pour lire la valeur de la broche analogique
void setup()
{
esc.attach (9); // le contrôleur est relié à la broche 9
}
void loop()
{
val = analogRead(pot); // lecture de la valeur analogique
val = map(val, 0, 1023, 0, 179); // suivant la lecture de la tension issue du pot.(entre 0,85V et 4.28V dans ce cas) sortie de 0 à 179
esc.write(val); // la consigne de vitesse est donnée par la valeur de 0 à 179
delay(15);
}
Il faudra peut-être affiner certaines valeurs dans la pratique.
Pour l'utilisation finale, je vais utiliser un Arduino Nano pour miniaturiser un peu.
Modifié par R1D1, 15 novembre 2017 - 02:36 .
Ajout dres balises [code]
#34
Centuri
-
- Membres
- 6 messages
Nouveau membre
- Gender:Male
- Location:Corsica
Posté 17 novembre 2017 - 04:22
Bonjour,
En premier lieu, merci à R1D1 pour l'ajout des balises que j'avais oubliés.
Pour NEKFURY.
C'est très simple, tu relie le fil noir du contrôleur (ESC) sur GND de la carte UNO (ou autre). Le fil jaune (ou orange) du contrôleur sur la broche D9.
Pour la poignée, le fil rouge sur le +5V, le noir sur GND et le fil vert (chez moi) sur la broche A0.
Tu télécharge le code, tu alimente ta carte Arduino par le port USB ou par un 12V extérieur (au choix). Tu alimente ton ESC en 3S ou 4S ou ce que tu as prévu en fonction de ton moteur.
Pour initialiser le contrôleur, tu met ta poignée à fond, tu branche ton accu, lorsque ça BIPE, tu met ta poignée à Zéro et tu aura le nombre de BIP correspondant au nombre de cellules de ta batterie et c'est tout, tu peux faire fonctionner ton moteur.
Chez moi ça fonctionne très bien, je regrette seulement de pas avoir un moteur avec un kv plus faible, mais pour essayer ça ira.
Voilà, si tu as d'autres questions....
- Mike118 aime ceci
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : vélo électrique, arduino, code




0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




