Je viens de mettre la vidéo de mon mini AT-ST sur ma chaîne yt donc j'ouvre le sujet ici.
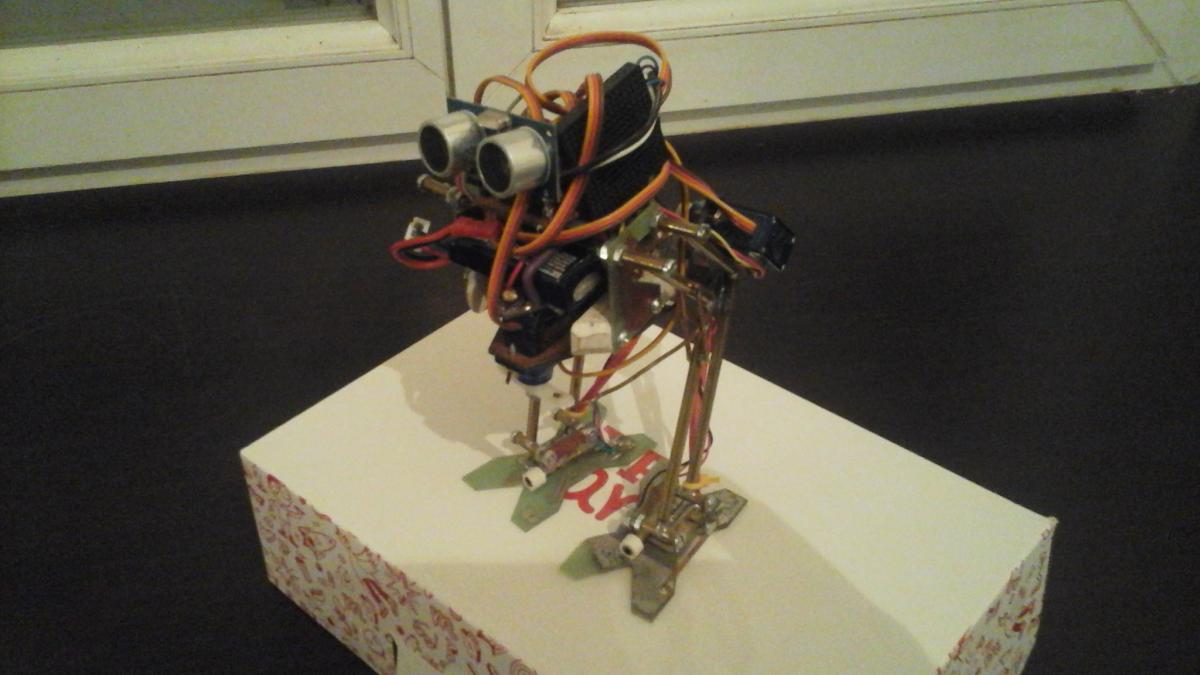
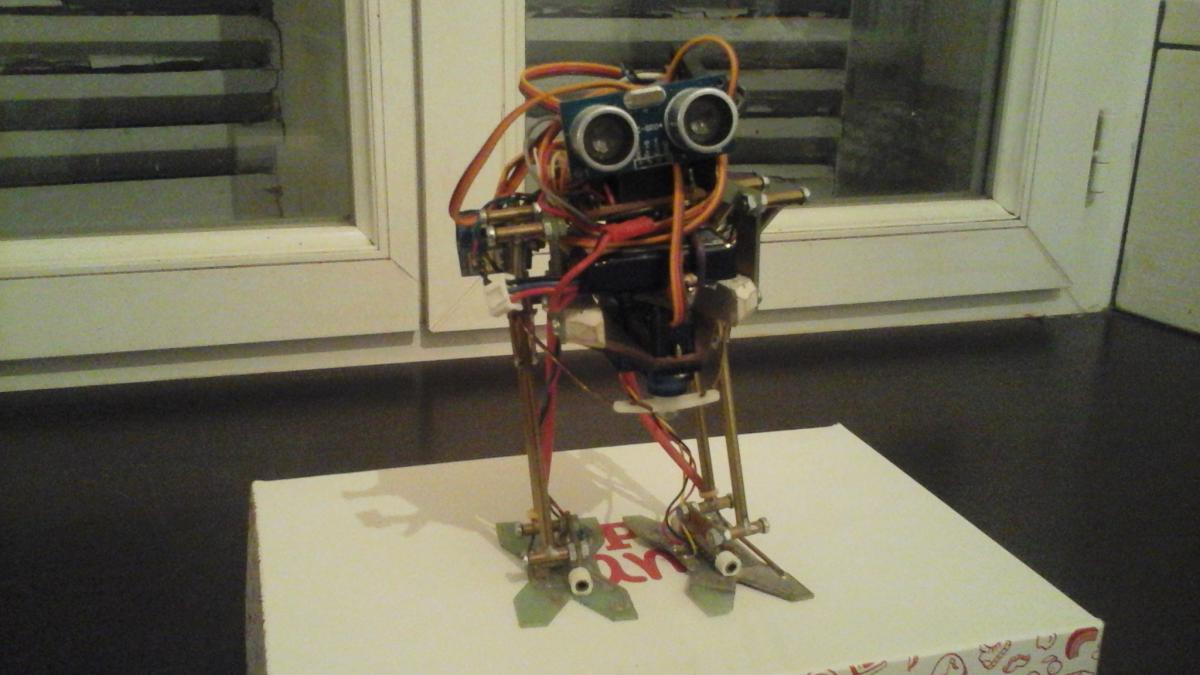
Ce robot à été conçu pour étoffer le décor d'un tournoi de jeux vidéo sur le thème StarWars que nous avons organisé il y a quelques années maintenant avec l'association dont je fait partie. Il est basé sur un arduino nano (chinois bien sure..) 4 servos tower pro 9g (heu.. chinois aussi) et un capteur ultra-sons HC-SR04 (inutile de précisé la provenance je pense..) bref, j'avais pensé au début le barder de capteurs mais finalement je me suis vite rendu compte que la simplicité me permettrais de programmer le tout plus rapidement vu que je débutais a ce moment là dans la "robotique". Il est vrai que malheureusement il tomberait facilement d'une table vu qu'il ne sait pas ou il met les pieds..

c'est après avoir vu la mécanique ingénieuse du mini mechadon de Myke Smith que je me suis lancé. Honnêtement je n'ai fait aucun calcul, seuls quelques légos techniques m'ont permis de visualiser un peu mieux le tout dans ma ptite caboche. Sachant que le tout serait plutôt léger je me suis lancé sans vraiment me soucier des puissances nécessaires. au bout du compte il pèse dans les 300 grammes pour une 20aine de cm et les tower pro sont tout a fait adaptés a ce genre de montage.
Pour le fun et pour tester la fonction tone() de la librairie arduino je l'ai doté d'un hp de pc portable directement sur une GPIO, je pense que j'aurais du interfacer avec un transistor vu que le volume est très faible et que cela doit un peu tirer sur la sortie. D'ailleurs si quelqu'un saurait m'expliquer l'influence de limpédance du hp sur la GPIO je suis preneur car j'aurais peut être bien pu cramer la sortie sans même m'en rendre compte vu qu'on a par précaution, l'habitude de mettre une diode de roue libre lorsqu'on commande une bobine de relais par exemple.
Pour ce qui est du programme il est assez simple, j'ai d'abord définie les limites de chaque servo puis écris un par un les mouvements, ça a été assez fastidieux, (marche avant, marche arrière, tourner, et quelques mouvements supplémentaires comme danser ou faire des "pointes") chaque mouvement est inscrit dans un cycle qui se répète, par exemple avancer se résume a lever une patte, l'avancer, la poser, faire pareil avec l'autre puis recommencer le cycle. chaque changement de mouvement fait repasser les actionneurs par leur position initiale. Tout ceci est séparé en fonctions, avancer() ou tourner() par exemple puis toutes les 10 secondes un random décide ce que le robot va faire pour les 10 prochaines secondes, il peut aussi simplement ne rien faire.
Pour le son j'ai écris une sorte de lecteur midi. Le fichier midi est en fait un tableau 2d ou est écris la partition, chaque note est définie par une fréquence, un octave et une durée, et une fonction millis() se charge de définir le BPM pour pouvoir laisser le processeur libre le temps de la lecture de la partition complète.
Bon il y a des bugs car de temps en temps on entend les servos grogner alors que le robot ne bouge pas, je pense que le programme reste dans une sorte de boucle infinie et fait changer la valeur des positions de servo de façon très rapide et certainement incohérentes. Heureusement la fonction random calée toutes les 10 secondes se charger de régler le problème en proposant un nouveau mouvement.
Voila c'est à peu près tout, si vous voulez les sources demandez-moi notament pour le petit "lecteur audio" je pense qu'il est simple et assez facile a utiliser.
Ma chaîne yt:https://www.youtube....WZkGUj_C-LfIuWQ
Le site de Myke Smith: http://home.ctlnet.com/~minimechadon/minimechadon.htm
et 2-3 tofs..
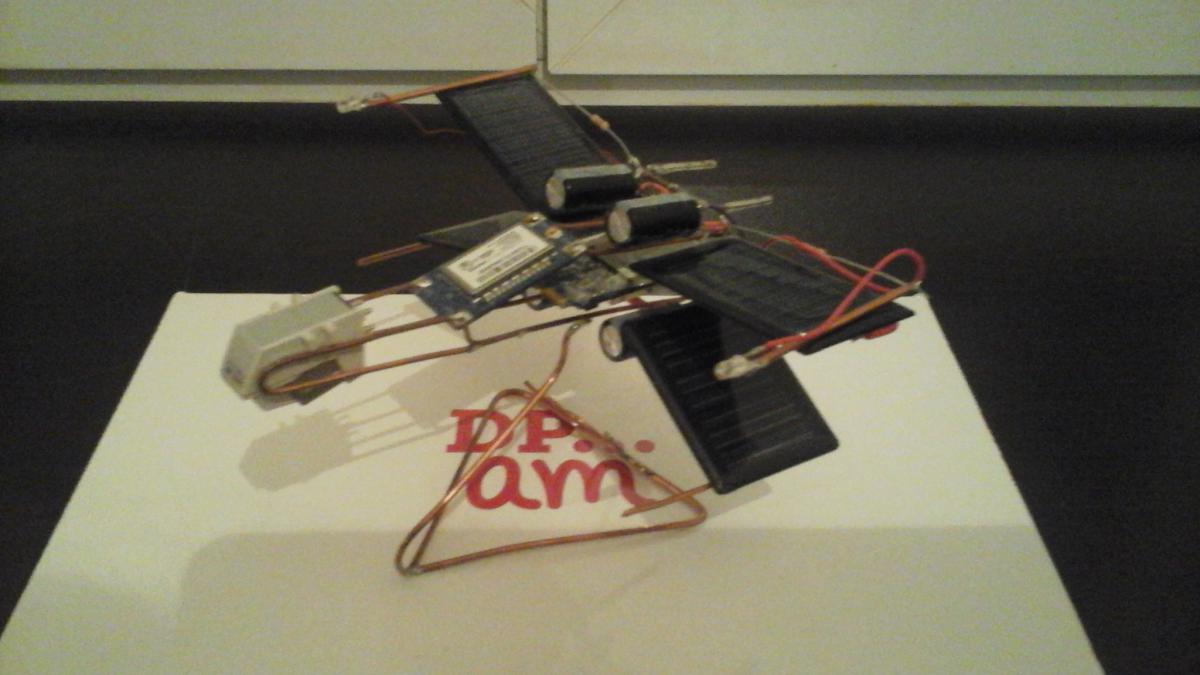
Et ça c'est la réplique d'un X-Wing que j'avais fait pour la même occasion, c juste des cellules solaires, chinoises bien evidement:), qui alimentent simplement 2 leds clignotantes récupérées sur un ptit copter qui a malencontreusement chuté une dernière fois..