Bonjour,
Je souhaite savoir si un engrenage en sortie du moteur pas à pas peut augmenter le couple de ce dernier.
Si oui, si l'on réduit de moitié la vitesse du moteur par un engrenage, de combien augmente t'on le couple ?
Par avance merci.

Membre
Posté 19 septembre 2017 - 09:02
Bonjour,
Je souhaite savoir si un engrenage en sortie du moteur pas à pas peut augmenter le couple de ce dernier.
Si oui, si l'on réduit de moitié la vitesse du moteur par un engrenage, de combien augmente t'on le couple ?
Par avance merci.
Membre passionné


Posté 19 septembre 2017 - 12:05
Membre passionné

Posté 19 septembre 2017 - 12:51
Membre
Posté 19 septembre 2017 - 08:22
Bonsoir,
Je vous remercie pour vos réponses.
Je suis en train de m'initier (en loisir) à la programmation C++ et je fais de petites expériences pour tenter de maîtriser la mécanique avec des moteurs pas à pas.
Si vous le permettez, je ferai un petit schéma simplifié (je dessine très mal) afin d'avoir un avis sur le meilleur montage.
Encore merci pour vos réponses.
Staff Robot Maker

Posté 19 septembre 2017 - 09:26
Ne pas hésiter à jeter un oeil au fiches de test des produits de la boutique vous trouverez entre autre les tests du moteur pas à pas http://www.robot-maker.com/forum/topic/11199-moteur-pas-a-pas-nema-23-teste-par-ashira/ et du driver de moteur pas à pas de la boutique =)
Tu y trouveras beaucoup d'informations utile ! =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre
Posté 25 septembre 2017 - 04:25
Bonjour,
Je reviens vers vous pour une question qui pourra peut être vous paraître élémentaire.
Je pense avoir compris le calcul des Newton/mètre.
Donc dans mon cas il faudrait (si l'on prend 10 N = environ 1 Kg) un moteur de 70 Nm.
Mais ce ne serait que pour maintenir la charge de 7 Kg et non pas la soulever, et le moteur serait gros et lourd.
Je souhaite avoir votre avis sur le meilleur ensemble engrenage/moteur pas à pas à placer à l'axe pour avoir le couple nécessaire au mouvement de mon bras de 1 mètre avec sa charge de 7 Kg.
Je vous joins un petit dessin (désolé pour le côté simpliste de ce dernier).
Merci pour vos réponses.
Bonne soirée à toute et à tous.
Membre passionné
Posté 25 septembre 2017 - 08:30
7 kg au bout d'un mètre, c'est bien ça, environ 70 Nm. Et encore, c'est sans compter le poids du bras lui-même. Et 70Nm, c'est juste pour maintenir le poids, pas pour le lever. Pour faire bien, il faudrait quelque chose comme 100Nm. C'est juste énorme. Il va te falloir un moteur gros et cher. Et pour les engrenages, il va te falloir un réducteur planétaire de qualité. Un simple engrenage cassera bien trop rapidement (à moins d'avoir des pièces de la taille de celles utilisées dans les boites de vitesses).
Pour te donner une idée, imagines lever un poids de 7kg bras tendu, sans utiliser le dos ni les jambes pour pousser. Tu ne le feras pas bien longtemps..
Il n'y a pas le dessin, selon ce que tu veux faire, le moteur pas à pas n'est peut-être pas le plus adapté. D'ailleurs un bras directement au bout d'un moteur, c'est rarement très bon en mécanique.
PS : Tu devrais aussi passer par la case présentation.
Pilier du forum

Posté 26 septembre 2017 - 05:51
pas forcément un gros moteur, mais une bonne démultiplication.
de plus, si tu utilises des pignons à denture droite (classiques) il te faudra au moins un module 2 pour un pignon acier
ou un module 3 pour du Delrin (plastique blanc utilisé couramment)
edit: je parle du module du pignon de sortie, il faudra augmenter progressivement la taille du module dans le réducteur, à moins d'utiliser un roue et vis
Mais ces questions ne sont plus sur le matériel de la boutique, c'est plutôt un problème mécanique
Pilier du forum

Posté 26 septembre 2017 - 09:12
Ou alors envisager une autre réduction si c'est possible, vis écrou par exemple, entre le bras et le moto réducteur. Ça verrouille la position du bras sans effort.
Tous les drivers que j'ai vu n'envoie qu'une partie du courant pour le maintient de la position, ça réduit le couple de maintient s'il ne bouge pas.
Pilier du forum
Posté 26 septembre 2017 - 09:43
oui, mais même dans le cas d'un roue et vis il faudra que la vis sans fin soit d'un module 2 voire même 3 car tout le poids repose sur une seule dent 
Membre
Posté 27 septembre 2017 - 10:55
Bonsoir à tous,
Un grand merci pour toutes ces pistes et explications que vous m'avez fourni.
Je vais commencer à bricoler des petits prototypes afin de tester les résistances de différents montages et apprendre par la même occasion.
J'ai récupéré plusieurs moteurs mais je souhaiterai savoir où me procurer différents petits engrenages. Avez-vous une adresse à me communiquer ?
D'avance merci.
Membre chevronné

Posté 01 octobre 2017 - 10:10
Si tu as la possibilité d'avoir une imprimante 3D, tu peux imprimer des réducteurs sur mesure pour les moteurs pas à pas.
J'ai testé celui-ci pour Nema 17:
https://www.thingiverse.com/thing:8460
C'est un réducteur 5:1
et la je vais tester ça variante, un double réducteur 5:1, ce qui va faire un 25:1 soit 25 fois plus de couple :
https://www.thingive...m/thing:1743732
C'est pour le monter sur mon bras robot : http://www.robot-maker.com/forum/topic/11216-bras-robot-bcn3d-moveo/
Membre
Posté 04 octobre 2017 - 10:52
Bonjour,
N'ayant pas accès à une imprimante 3D, je cherche sur internet des trains d'engrenages en kit à monter suivant la réduction que l'on souhaite.
Après des heures de recherche, je suis très surprise de constater que seuls des kits très bas de gamme (et très peu cher) provenant de Chine sont dispo.
Rien d'un peu plus qualitatif.
Peut-être que personne n'en a besoin ....
Est ce que quelqu'un sait comment on peut se procurer des petites boites à engrenage pour pouvoir bricoler différents rapports entrée/sortie ?
Merci
Cordialement
Pilier du forum
Posté 04 octobre 2017 - 11:44
Tu ne vas pas trouver de kit tout prêts mais devoir acheter des pignons à la demande.
Par contre, je suis désolé d'insister, mais vouloir tenir 7Kg à 1m demande un pignon de sortie en acier et en module 2 minimum
Un lien vers un PDF qui va bien pour calculer ce dont tu auras besoin : http://www.hpceurope.com/docFichesTechniques/EngrenagesDroit_CalculDuCouple.pdf
HPC a une bonne gamme de pignons et autres choses, leur site : https://www.hpceurope.com/fr/
Je ne sais pas dans quel coin tu habite, mais dans le Sud-Ouest nous avons "la CIR" qui possède
un comptoir et vend au particuliers. ( http://www.cir.fr/votre-agence/ )
Membre
Posté 04 octobre 2017 - 02:48
Effectivement, après réflexion, je suis consciente que 7 Kg au bout d'1 mètre, demandera beaucoup d'efforts.
Je souhaitais donc m’entraîner sur des choses beaucoup plus raisonnables et tester les points de ruptures.
Pour se faire, j'ai récupéré deux moteurs pas a pas (de 5 Nm) et je souhaitais monter des petits engrenages pour apprendre et faire varier la vitesse et le couple.
D'où ma recherche de petits engrenages modulables en kit. Mais tout de même assez costaud pour caler le moteur et non casser les pignons.
Merci.
Membre chevronné
Membre
Posté 09 octobre 2017 - 08:54
Bonsoir,
Je reviens vers vous après quelques essais sur un petit montage.
Correction sur mon moteur, c'est un néma 17 (donc bien moins puissant).
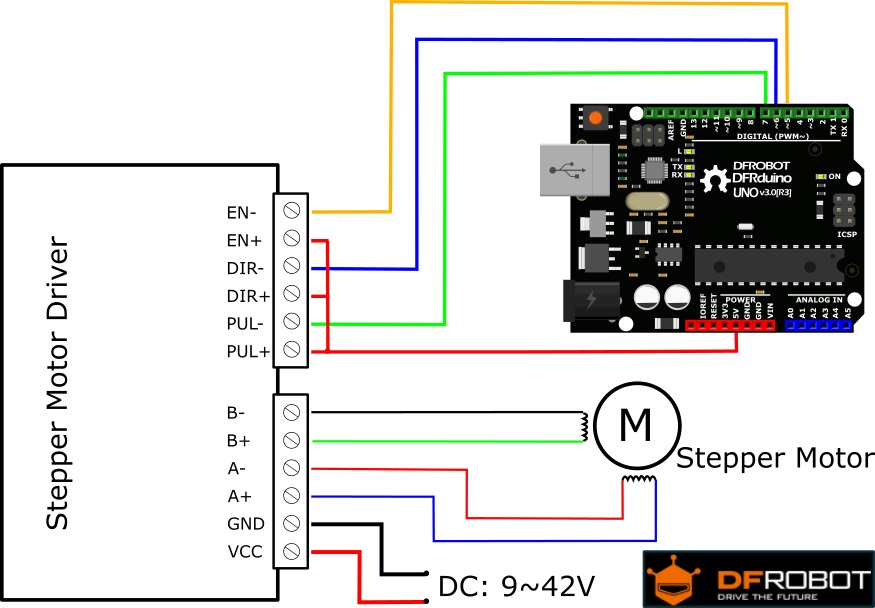
J'ai fais le montage suivant la photo jointe.
Membre
Posté 09 octobre 2017 - 09:18
Oups mauvaise manip !
Bonsoir,
Je reviens vers vous après quelques essais sur un petit montage.
Correction sur mon moteur, c'est un néma 17 (donc bien moins puissant).
J'ai fais le montage suivant la photo jointe.
J'ai trouvé le programme suivant: (existe t'il un programme encore plus simple pour aller simplement dans un sens puis revenir en faisant varier la vitesse ?)
int PUL=7; //define Pulse pin
int DIR=6; //define Direction pin
int ENA=5; //define Enable Pin
void setup() {
pinMode (PUL, OUTPUT);
pinMode (DIR, OUTPUT);
pinMode (ENA, OUTPUT);
}
void loop() {
for (int i=0; i<6400; i++) //Forward 5000 steps
{
digitalWrite(DIR,LOW);
digitalWrite(ENA,HIGH);
digitalWrite(PUL,HIGH);
delayMicroseconds(50);
digitalWrite(PUL,LOW);
delayMicroseconds(50);
}
for (int i=0; i<6400; i++) //Backward 5000 steps
{
digitalWrite(DIR,HIGH);
digitalWrite(ENA,HIGH);
digitalWrite(PUL,HIGH);
delayMicroseconds(50);
digitalWrite(PUL,LOW);
delayMicroseconds(50);
}
}
J'ai donc branché ce petit moteur sur 12 V (batterie voiture).
Ma question est la suivante:
Avec ce matériel ci, quel est le réglage et les branchements optimums pour obtenir le meilleur couple de ce moteur ?
D'avance merci

Staff Robot Maker
Posté 09 octobre 2017 - 09:37
tu as une librairie qui s'appel accelStepper =)
Regarde la fiche de test faite par ashira pour un driver de moteur pas à pas du Shop  tu as pas exactement le même driver mais le câblage est similaire =)
tu as pas exactement le même driver mais le câblage est similaire =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre
Posté 09 octobre 2017 - 10:28
Merci pour ta réponse mais j'avais déjà vu et téléchargé sa fiche.
Malheureusement, je suis loin d'avoir le niveau pour tout comprendre et transposer.
D'où ma demande pour savoir si quelqu'un a un bout de code et l'expérience pour optimiser mon montage.
Il me faudrait trop de temps pour atteindre le niveau requis pour créer moi-même mes programmes et en connaître suffisamment sur les moteurs.
Je souhaite simplement faire un joli bras robot pour m'amuser et apprendre en m'amusant.
Je n'ai pas le niveau pour toute cette partie moteur, réducteur et programmation. Mais je me débrouille pas mal en tôlerie et je pense pouvoir faire un truc pas mal et de belle taille.
Donc je pensais que quelqu'un pour qui mon problème serait pour lui de la rigolade me donnerait des réponses concrètes et applicables.
Si ce n'est pas possible, ce n'est pas grave et je vous remercie d'avoir déjà répondu à une partie de mes interrogations.
Bien cordialement








0 members, 0 guests, 0 anonymous users




