T'as utilisé quel couplage entre servo et le monde lego ?
Et bien, à vrai dire, j'en ai bavé !
Dans le monde Lego, il n'y a aucun problème d'alignement. Tout est fait pour une adaptation instantanée de tout avec tout. Il existe quelque exceptions, mais c'est assez rare.
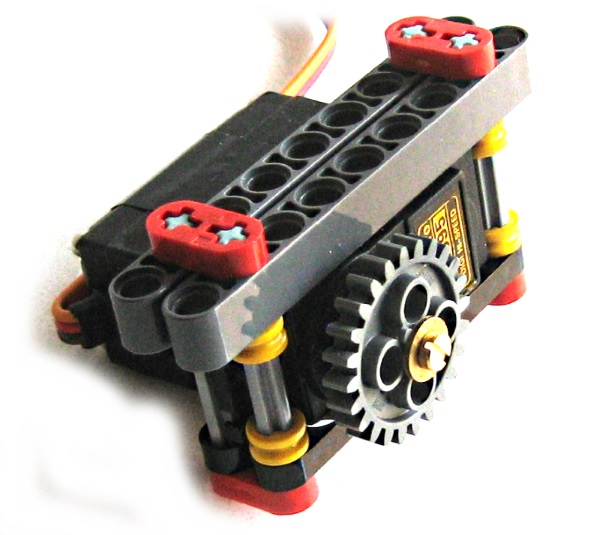
J'ai mis une bonne semaine avant de trouver l'oeuf de Christophe Colomb, la chaine Lego. Grace à cette chaine à maillons détachables, tout devient beaucoup plus simple.
De plus, j'ai percé une roue dentée Lego et je l'ai adaptée par perçage et en force à l'engrenage du servo. Cela fonctionne à merveille. Je n'en reviens pas encore. Si j'avais su, je l'aurais fait depuis longtemps. Mais tout ceci est hautement sacrilège...
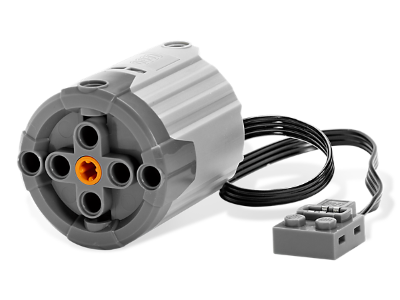
Bien entendu, je vais détailler l'adaptation de ce servo dans une vidéo. Il est là, le tour de force !
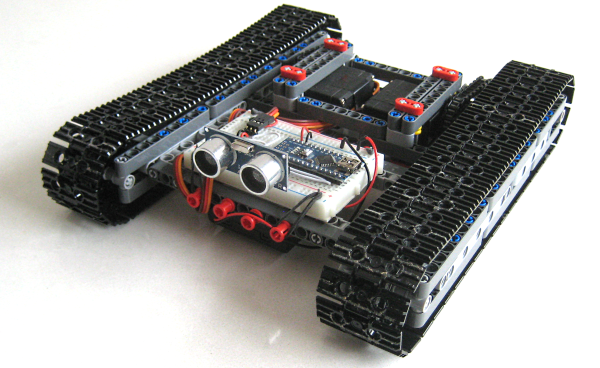
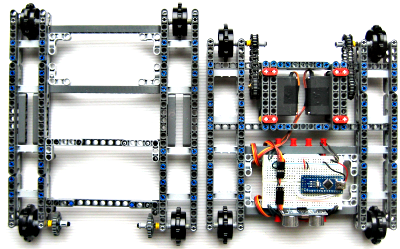
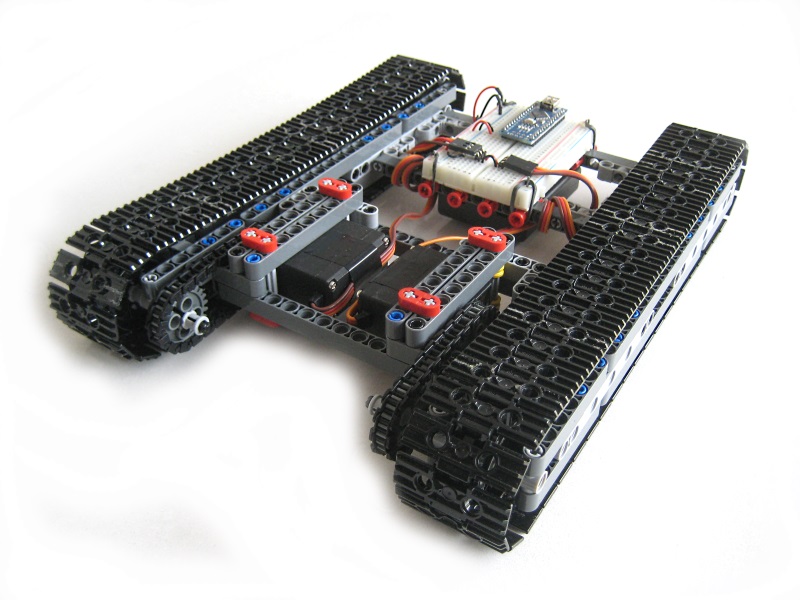
Pour le reste, dans la vidéo, en accéléré, je démontrerai que Mostiko ne prends que quelques minutes pour être monté. Je donnerai également la liste des pièces nécessaires, ainsi que leur prix.
Le seul petit problème, c'est la vitesse. Je ne m'attendais pas à ce que ce servo soit aussi lent. Je vais essayé un rapport de pignons différent, mais les possibilités sont assez limitées.
Voilà, maintenant, quelqu'un qui veut faire un petit robot qui ne se cogne pas contre les murs, aura tout ce qu'il faut pour se faire la main.



 T'as mis des capteurs ? Il se pilote à distance ?
T'as mis des capteurs ? Il se pilote à distance ?