Faire un banc de test de couple moteur/servo, l'idée m'a trottée dans la tête depuis longtemps.
J'avais commencé par faire un système vertical avec un peson accroché au plafond de ma cave. Catastrophique ! Parfois j'ai de drôles d'idée...
Puis j'ai imaginé un système horizontal, puis...puis... j'ai laissé tomber, comme beaucoup de mes projets.
C'est Ashira qui m'a remis sur les rails avec son dernier test, http://www.robot-maker.com/forum/topic/11794-test-du-nema-17hs1352-teste-pas-ashira/
A vrai dire, je ne sais pas vraiment où je vais. Je compte beaucoup sur vous pour m'aider car mes compétences en physique et en électronique sont très limitées.
Mon idée, c'est de tendre un élastique, l'axe du moteur ou du servo étant équipé d'un palonnier ou d'un excentrique qui appuiera ou soulèvera l'élastique, comme on veut. Ainsi, une tension sera exercée sur le peson.
Là, il s'agit d'un peson pour peser des valises. Vous en trouverez ici :
https://www.ebay.fr/...vvFF-YFWsUs1NMg
https://www.ebay.fr/...D4AAOSw1cNaCClc
http://www.ebay.fr/itm/PESON-ELECTRONIQUE-BALANCE-POISSON-PECHE-VELO-VTT-BAGAGES-GIBIER-5g-40kg-PESE/302085079251?hash=item4655ac80d3:g:thAAAOSwNRdX5lyZ
Ashira et moi-même, nous avons celui du premier lien. Simple coincidence. Les autres sont peut-être bien également.
Ces pesons mémorisent la mesure lorsqu'elle est stable. Cela peut être considérer comme un avantage ou comme un inconvénient, il faudra voir avec la pratique.
J'ai commandé un gros élastique de mercerie 3cm de large et 1m de long que j'ai replié en 4. https://www.ebay.fr/...=item60290aa66c
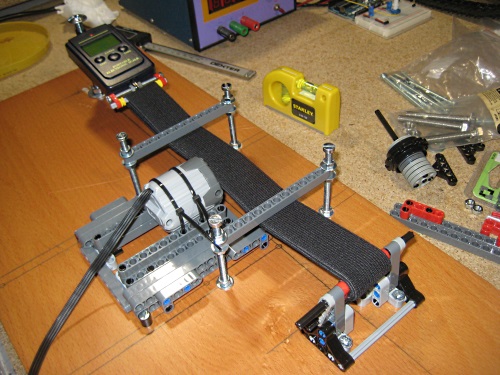
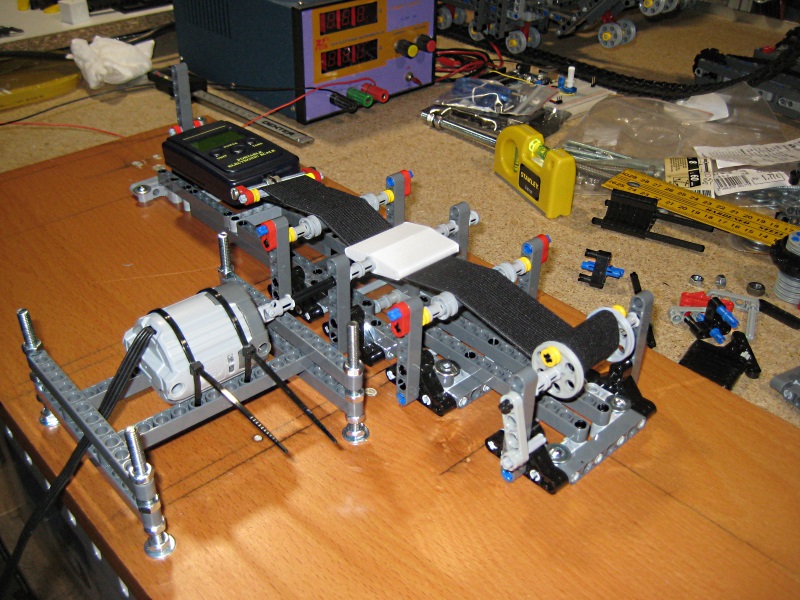
Voici 2 photos qui montre le banc de mesure.
Sur la gauche, le support du peson est réglable en hauteur. C'est un peu compliqué, j'ai déjà une autre idée en tête. Sur la droite un mécanisme d'enroulement permet de tendre l'élastique.
J'ai utilisé des pièces Lego vissées sur une planche. Pour la conception, c'est très pratique, on peut faire et défaire à volonté. Pour la partie électronique, je compte utiliser mon alimentation qui possède un voltmètre et un ampèremètre, on la voit sur les photos.
Voilà, j'en suis là. Mais les choses devraient évoluer et je vous monterai chaque étape au fur et à mesure.