Bonjour,
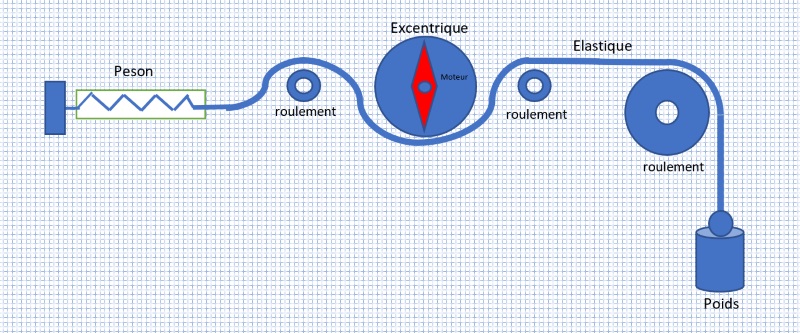
Je rejoins les dires d'Arobasseb, je ne comprends pas vraiment le principe de mesure avec ce montage.
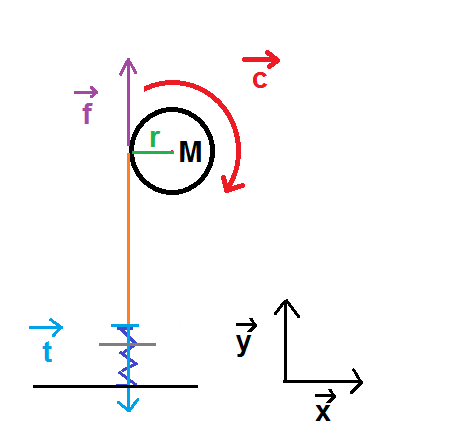
Pour moi dans des lointains très lointains souvenirs, on doit pouvoir mesurer le couple d'un moteur en regardant l'accélération (?) d'une masse sur l'axe du moteur, ou un truc du genre mais j'avoue que je ne suis pas bien sur de moi.
Bref je suis curieux de voir ce que tu vas pouvoir obtenir, si le sytème marche ça sera top et ingénieux!
(D'ailleurs moi qui suis un peu sceptique des fois sur l'utilisation des legos, ici tu montres bien à quel point c'est efficace pour d prototypage)
Pour les jauges de poids, en pont de Wheatstone, le principe est que sans déformation, il n'y a pas de tensions aux bornes de mesures, sur déformation, une tension se créée. Donc noramlement avec une entrées analogique ca peut le faire (bon faut voir l'amplitude de la sortie du capteur quand même).
D'ailleurs sur tes liens d'après, c'est livré avec un bête covertisseur analogique digital, qui fait ce que fait un




 .
.

 ( ou bien moi je verrais ce qui m'échappe
( ou bien moi je verrais ce qui m'échappe