

Mouais par trop convaincu par tes résultats surtout entre le voltage que tu met et la différence entre tes valeurs de ton peson. Faudrai effectivement augmenter ta charge et trouver la fiche technique de ton moteur pour avoir une référence faite par l'industriel avec la tension utiliser et le couple qu'il développe et de voir si ton banc de test est valable ou pas.

122 réponses à ce sujet
#62

Mike118
-

- Administrateur
-

- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 17 janvier 2018 - 01:27
Voici quelques mesures que je viens de faire. C'est très bizarre ! On dirait que le moteur se fiche royalement de la charge (1kg) comme si il tournait à vide. Quelque soit la tension, l'intensité est quasi identique et le peson indique à peu près le même poids. La seule chose qui varie vraiment, c'est la vitesse.
Demain je ferai un autre chariot et je le chargerai de plomb, 2kg.
Voici les mesures pour une charge de 1kg :
6V - 0,13A - 200g
9V - 0,17A - 185g
12V - 0,17A - 200g
Les mesures sont approximatives et je les ai faites de multiple fois pour en extraire des valeurs moyennes, mais je pense être proche de la réalité.
De toute façon, cela ne varie pas beaucoup, 15g et quelques milli ampères.

c'est pas bizarre du tout c'est exactement le résultat théorique que je t'ai indiqué avec mon étude =)
le poids affiché par le peson est directement proportionnel au poids que tu mets comme " tare" =)
Les petites variations observés sont certainement les effets dynamiques / frottements ...
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#63
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 17 janvier 2018 - 07:55
Tu veux dire les 200g ?Les petites variations observés sont certainement les effets dynamiques / frottements ...
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#64
Forthman
-

- Membres
-
- 1â¯382 messages
Pilier du forum
- Gender:Not Telling
- Location:Montauban (82)
Posté 17 janvier 2018 - 08:42
ça fait un petit moment que j'observe ce post en silence, mais là ça me démange d'ouvrir ma bouche 
question : pourquoi vouloir tester le couple/vitesse/puissance d'un moteur ?
normalement, avec la référence fabricant, tu peux retrouver ces infos, et si c'est pour tester un moteur inconnu,
comment déterminer sa tension d'alimentation, et connaître sa vitesse théorique ?
Je me réponds car je viens d'y penser : être sûr que le moteur n'a pas été maltraité ?... ok 
Sur tes vidéos, je trouve que le moteur tourne bien vite pour que ton peson ait le temps de fournir une valeur correcte.
Ou alors il ne sert qu'à donner la valeur du poids déplacé ?
Enfin, pour finir avec mes questions existentielles, je trouve la valeur très compliquée à obtenir.
Le couple n'est pas régulier à cause de la came, de l'élasticité de la courroie, de l'inertie du motoréducteur...etc...
Ton montage va permettre de comparer deux moteur/motoréducteurs identiques, mais je ne suis pas sûr que tu arrives
à déterminer des données sur le moteur.
Si je devais faire un montage, j'utiliserais un frein (genre frein à disque) accouplé à un peson, plus un capteur de vitesse
sur l'arbre de sortie du moteur.
Mais même en ayant ces valeurs, ça ne nous donne pas vraiment les caractéristiques du moteur, un moteur peut très bien
fournir 30% de plus de couple... et griller au bout d'une heure 
#65
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 17 janvier 2018 - 12:07
Oui, c'est ça ! Il donne la valeur de la tare, plus une petite valeur. Si on fait la somme des 2 valeurs, on a la force, le couple (comme vous voudrez), du moteur.Sur tes vidéos, je trouve que le moteur tourne bien vite pour que ton peson ait le temps de fournir une valeur correcte.
Ou alors il ne sert qu'à donner la valeur du poids déplacé ?
Ce peson a l'air de suivre le rythme, mais c'est vrai que pour bien évaluer la mesure, il faut en faire plusieurs.
A vrai dire, je ne sais pas vraiment ou je vais.
Mais en résumé, je peux voir si mon moteur est capable de soulever un poids de 1kg (comme ici) avec un levier de 2cm (modifiable) et un ampérage d'environ 0,15A.
Je donne un exemple, mes chars montent des escaliers qui ont une pente d'environ 30°. Les barbotins ont un rayon d'environ 2cm. Le poids du char est de 2,5kg.
Avec ce banc de mesure, je peux voir si mes moteurs tiennent la route avant de me lancer dans la construction du char.
Déjà, rien que pour ça, je trouve ce banc de mesure intéressant.
Pas bon, ce que je dis ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#66
Forthman
-
- Membres
-
- 1â¯382 messages
Pilier du forum
- Gender:Not Telling
- Location:Montauban (82)
Posté 17 janvier 2018 - 12:31
Si on fait la somme des 2 valeurs, on a la force, le couple (comme vous voudrez), du moteur.
Pas vraiment, c'est comme quand tu tends une courroie, si sur le tendeur tu appliques 20Kg de tension, tu peux encore
faire bouger la courroie en appuyant dessus sans avoir à fournir beaucoup d'effort.
Donc pour résumer, tu te casses la tête pour faire un banc de test, pour ne pas avoir à te casser la tête par la suite,
à faire des calculs 
#67
Mike118
-
- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 17 janvier 2018 - 01:51
Moi je trouve qu'il se casse la tête pour faire un banc de test " compliqué " où en plus il faut se casser la tête pour faire les calculs ( mon premier schémas est beaucoup plus simple et permet de faire très facilement les calculs ^^
Et le fait d'incliner les système ne facilite pas les calculs x)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#68
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 17 janvier 2018 - 02:02
Pourrais-tu faire bouger la courroie si la force que tu exerces est inférieure à 20kg ?Pas vraiment, c'est comme quand tu tends une courroie, si sur le tendeur tu appliques 20Kg de tension, tu peux encore
faire bouger la courroie en appuyant dessus sans avoir à fournir beaucoup d'effort.
On peut effectivement voir ça comme ça !Donc pour résumer, tu te casses la tête pour faire un banc de test, pour ne pas avoir à te casser la tête par la suite,
à faire des calculs
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#69
Forthman
-
- Membres
-
- 1â¯382 messages
Pilier du forum
- Gender:Not Telling
- Location:Montauban (82)
Posté 17 janvier 2018 - 03:17
Pourrais-tu faire bouger la courroie si la force que tu exerces est inférieure à 20kg ?
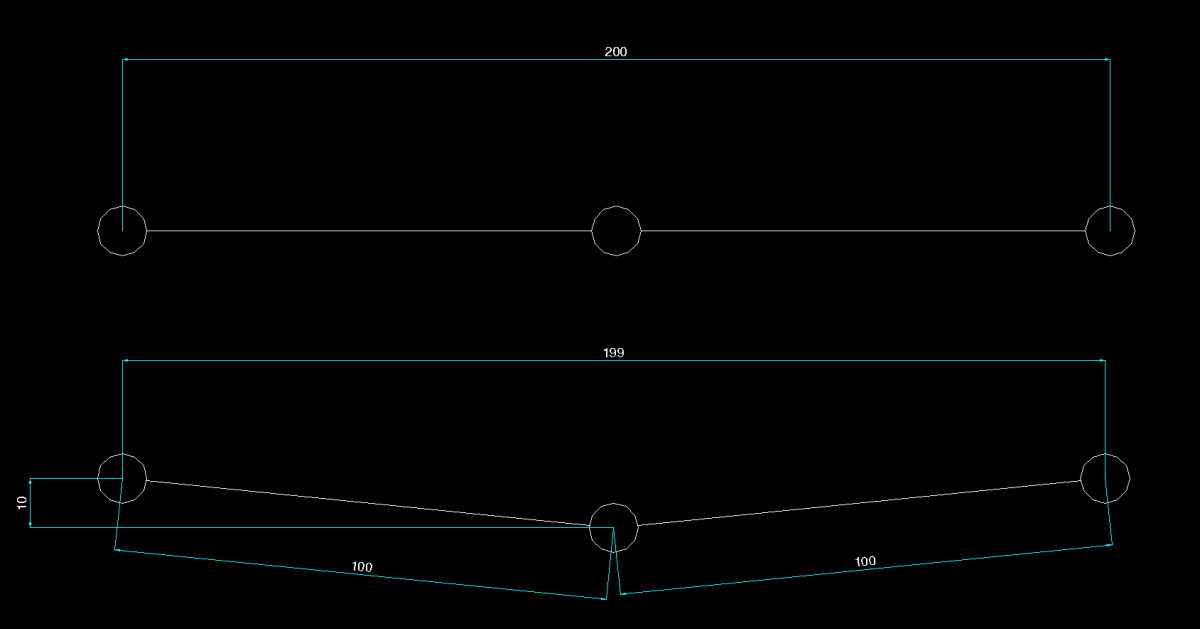
petit exemple : Si j'ignore l'élasticité de la courroie, elle se comporte comme 2 bielles
sur mon petit dessin, on voit que un déplacement de 10mm au milieu réduit la longueur de 1mm
donc l'effort sera divisé par 10.
Cet effort va varier en fonction du déplacement de l’appuie (c'est du Pythagore, il faut imaginer deux triangles rectangles dos à dos)
Dans ton cas, au fur et à mesure que ta came appuie sur la courroie, ton moteur a besoin de moins en moins de couple puisque la direction de
l'effort se rapproche de l'axe du moteur.
Ensuite il faut tenir compte du frottement, qui à l'inverse est négligeable au début, puis devient plus fort quand la came appuie au maximum sur la courroie
Oui... c'est pas simple
Image(s) jointe(s)
#70
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 17 janvier 2018 - 07:50
Aujourd'hui, je pense avoir fait ma dernière vidéo sur ce banc de test.
Au delà de vos excellentes démonstrations, mes tests ne sont pas concluants. Donc, ce n'est pas bon !
Voici les derniers résultats avec une charge de 1,5kg. J'ai refait le chariot dans lequel j'ai mis du plomb :
6V - 0,22A - 440g
9V - 0,20A - 400g
12V - 0,22A - 395g
En résumé, quelque soit la tension, l'intensité et la force/couple sont toujours identiques. Seul, la vitesse change. Cette égalité de l'intensité m'intrigue beaucoup.
Au delà de la théorie, je vous invite quand même à expérimenter par vous même. Si Ashira fait quelque chose, je suivrai cela de très près.
En marge de ce test, je pense que c'est la première fois que j'utilise des Lego en dehors du cadre strict du modèle Lego. Après quelques tâtonnement, j'ai moi-même été surpris par l'efficacité et la rapidité de la mise en oeuvre.
J'espère que vous avez apprécié.
Au delà de vos excellentes démonstrations, mes tests ne sont pas concluants. Donc, ce n'est pas bon !
Voici les derniers résultats avec une charge de 1,5kg. J'ai refait le chariot dans lequel j'ai mis du plomb :
6V - 0,22A - 440g
9V - 0,20A - 400g
12V - 0,22A - 395g
En résumé, quelque soit la tension, l'intensité et la force/couple sont toujours identiques. Seul, la vitesse change. Cette égalité de l'intensité m'intrigue beaucoup.
Au delà de la théorie, je vous invite quand même à expérimenter par vous même. Si Ashira fait quelque chose, je suivrai cela de très près.
En marge de ce test, je pense que c'est la première fois que j'utilise des Lego en dehors du cadre strict du modèle Lego. Après quelques tâtonnement, j'ai moi-même été surpris par l'efficacité et la rapidité de la mise en oeuvre.
J'espère que vous avez apprécié.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#71
Mike118
-
- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 17 janvier 2018 - 10:27
je te propose d'enrouler ton élastique autour d'une poulie pour qu'il tire sur le peson =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#72
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 18 janvier 2018 - 08:21
Cela, c'est ce que je faisais dans la première version, http://www.robot-maker.com/forum/topic/11846-un-banc-de-test-de-couple-moteurservo/?p=91428je te propose d'enrouler ton élastique autour d'une poulie pour qu'il tire sur le peson =)
Mais au final, ce n'était pas vraiment pratique de bloquer la poulie.
De plus, aujourd'hui ce n'est plus un élastique, mais une courroie, http://www.robot-maker.com/forum/topic/11846-un-banc-de-test-de-couple-moteurservo/?p=91530
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#73
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 29 janvier 2018 - 09:13
Et ça. Vous en pensez quoi ?
- Forthman aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#74
Mike118
-
- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 29 janvier 2018 - 09:28
J'ai d'abord été très impressionné par le résultat : 100 Kg avec des légo ... Waou !
Ensuite j'ai encore mieux compris pourquoi j'ai été aussi impressionné ...
Beau boulot pour la répartition des efforts ... En effet ça montre que beaucoup de choses sont réalisable avec des lego si on se donne la peine de chercher les solutions.
Cependant en regardant une deuxième fois la vidéo, sans en retirer " la prouesse technique " que la réalisation représente, ainsi que les astuces mise en oeuvre, je me dit qu'il peut être bien dommageable parfois de se " borner à du lego " ... En dehors de l'aspect "prouesse" que cela représente de le faire avec du lego, si le but est de lever 100 Kg avec un moteur cela se fait beaucoup plus facilement en prenant du matériel adéquate ... =)
- Forthman aime ceci
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#75
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 30 janvier 2018 - 07:12
Cela, je le savais déjà !En effet ça montre que beaucoup de choses sont réalisable avec des lego...
En fait, je voulais votre avis sur le banc de mesure.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#76
Mike118
-
- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 30 janvier 2018 - 07:21
Il faudrait faire exactement la même chose avec une " simple poulie " et pas de rapports de réduction.
Pas besoin de faire compliqué =)
on en revient au schémas que je proposais.
- Forthman aime ceci
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#78
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 30 janvier 2018 - 07:55
Ce schéma de base, je le connaissais. C'est ce que fait Philo sur son site, http://www.philohome.com/motors/motorcomp.htm
Mon banc de mesure est inclinée au lieu d'être à la verticale, mais cela uniquement pour des raisons pratique.
Le peson est en haut, là il est en bas, mais ma charge est bien en bas.
La seule différence à mes yeux, c'est que lui tire en continu, alors que moi je tire de manière discontinu.
Merci.
Mon banc de mesure est inclinée au lieu d'être à la verticale, mais cela uniquement pour des raisons pratique.
Le peson est en haut, là il est en bas, mais ma charge est bien en bas.
La seule différence à mes yeux, c'est que lui tire en continu, alors que moi je tire de manière discontinu.
Merci.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#79
Mike118
-
- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 30 janvier 2018 - 08:10
Non la différence que tu ne vois pas c'est comment s'exercent les efforts ...
Je ne vois pas comment te le montrer différemment / mieux que ce que j'ai déjà fait ...
Même si tu ne vois pas encore la différence, tu ne veux pas essayer de faire le deuxième banc de test à côté et de faire les essais sur les deux bancs de tests pour comparer ce qui se passe ?
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#80
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 30 janvier 2018 - 02:09
Oui, peut-être qu'un jour je reviendrai sur ce sujet.Même si tu ne vois pas encore la différence, tu ne veux pas essayer de faire le deuxième banc de test à côté et de faire les essais sur les deux bancs de tests pour comparer ce qui se passe ?
Mais ma démarche, mon plaisir, c'est d'innover, améliorer, trouver quelque chose.
Quand ça marche, je suis très content. Et quand ça ne marche pas, et bien tant pis, je passe à autre chose.
- Melmet aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




