Oui, j'y ai bien pensé, d'autant qu'il existe peut-être une solution avec une poulie Lego.Pour un test de servo tu peux faire simple, les palonniers rond existent, il suffit de lui rajouter une gorge et d'attacher un morceau de fil non extensible.
Ce même fil qui est rattaché à ton peson/elastique/ressort. après ya plus qu'à aligner horizontalement le haut du palonnier avec le point d'encrage du peson, et tout restera a 90°.
Oui, j'ai tout aligné sur le haut du palonnier.
Intéressant ! Mais bon, là, j'ai tout fait pour bloquer le peson, mais je note ça dans un coin de ma tête.Tu peux aussi faire la manip inverse: dire au servo de maintenir 90° et tirer sur le peson. Quand le palonier change de position c'est que tu as passé son couple de maintien.
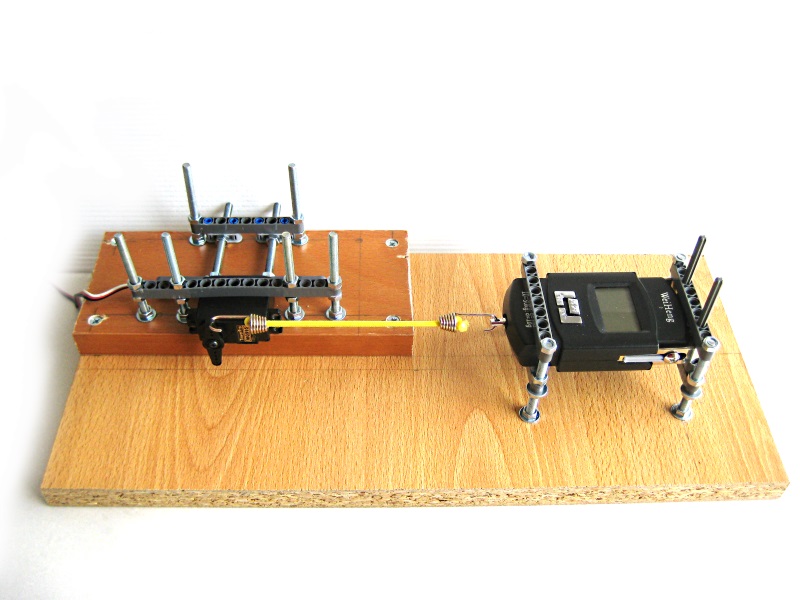
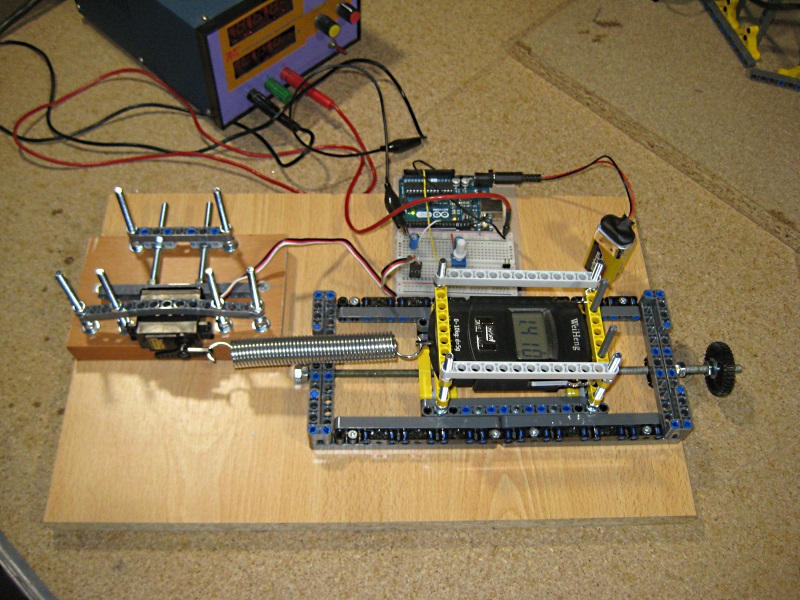
Je viens de faire mon premier test. Pas terrible, difficile de bien fixer le servo. J'ai utilisé un mini tendeur, c'est pas mal.
Demain, j'essaye de faire quelques photos, voir une vidéo.