Le cloud, l'autre mec de DustCloud l'as sniffé et décortiquer, oui SSL, et oui tu peux leur envoyé des saltées lol.
Moi, j'ai une connexion de merde, c'est aussi une des raison que je refuse tous cloud chez moi, tout doit être local, et indépendant d'Internet (Je peux contrôle ma maison par SMS ...).
Le SLAM c'est telement nouveau pour moi, que je ne sait pas si c'est du proprio ou du pompage, je dirais quand même du pompage quand je decortique les binaires (car dejas ce truc "player" semble venir de "http://playerstage.sourceforge.net/").
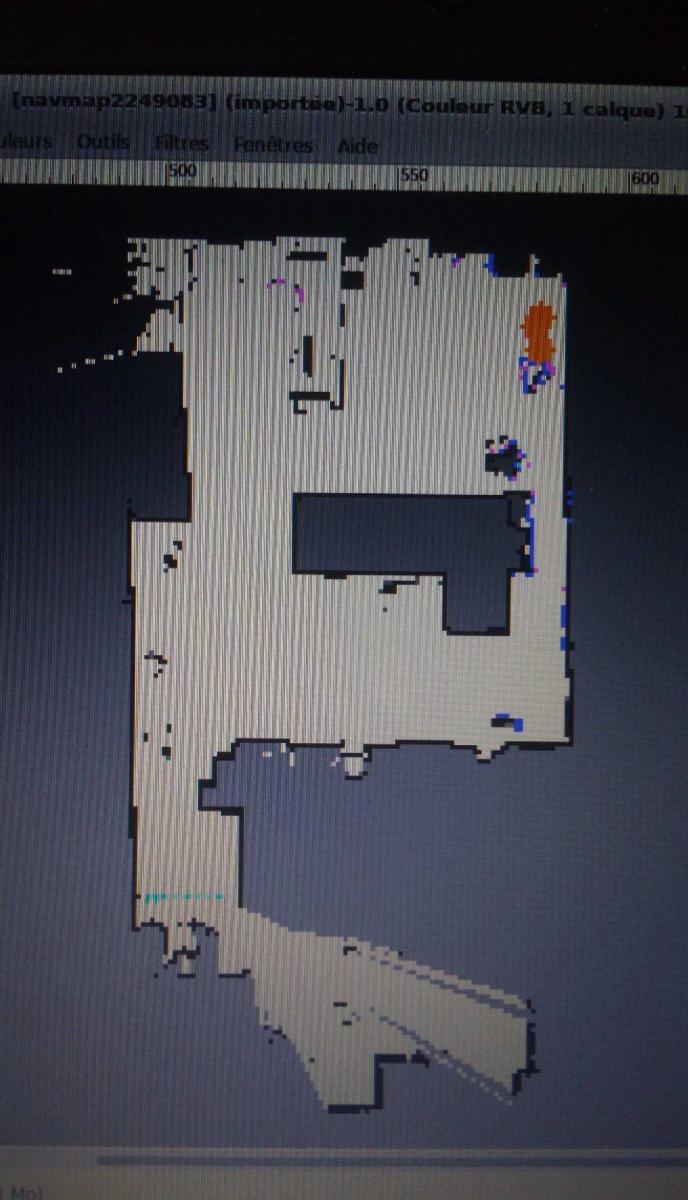
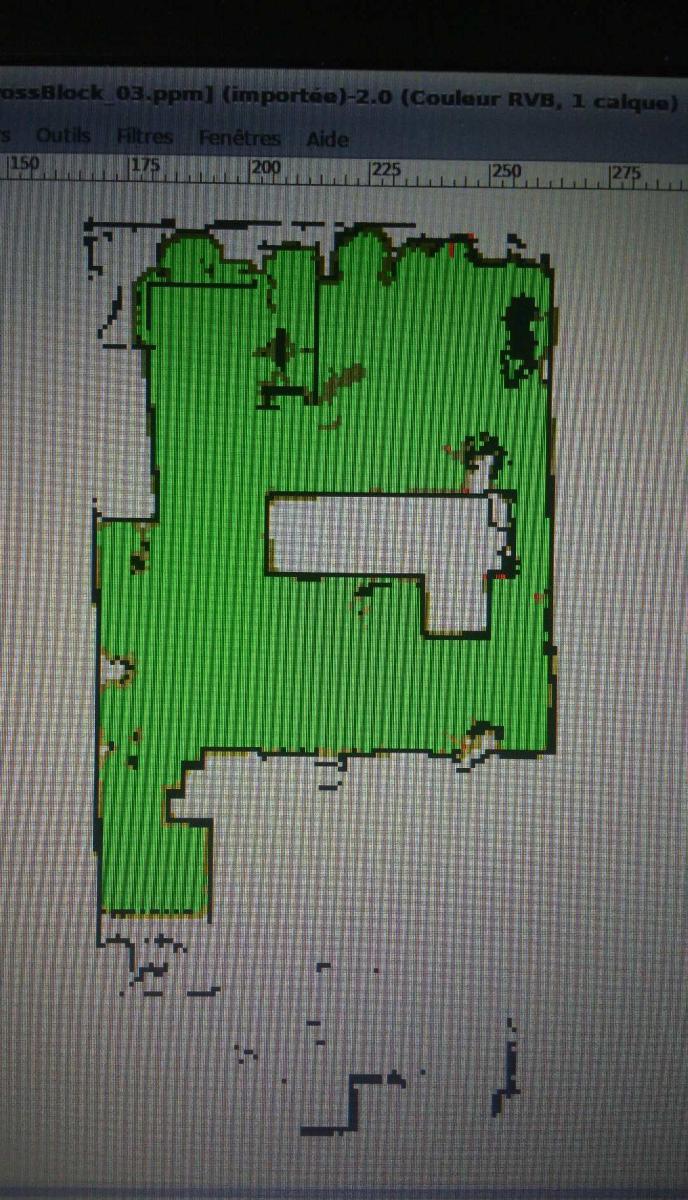
Tien je vous donne des parties de fichiers générer, peut être que le format vas vous parler (je met les 100 premières lignes seulement):
SLAM:
root@rockrobo:/dev/shm# head SLAM_fprintf.log -n 100
11.356 pause
42.874 pause
43.151 pause
43.458 resume
43.689 reset
47.042 estimate 0.000 0.000 0.000
47.262 estimate 0.000 0.000 0.000
47.462 estimate 0.000 0.000 0.000
47.662 estimate 0.000 0.000 0.000
47.882 estimate 0.000 0.000 0.000
48.082 estimate 0.000 0.000 0.000
48.302 estimate 0.000 0.000 0.000
48.522 estimate 0.000 0.000 0.000
48.721 estimate 0.000 0.000 0.000
48.921 estimate 0.000 0.000 0.000
49.121 estimate 0.000 0.000 0.000
49.214 pause
49.483 pause
88.915 pause
89.188 pause
89.472 resume
89.682 reset
92.498 pause
92.768 pause
207.213 pause
207.487 pause
207.771 resume
207.980 reset
210.880 estimate 0.000 0.000 0.000
211.099 estimate 0.000 0.000 0.000
211.321 estimate 0.000 0.000 0.000
211.520 estimate 0.000 0.000 0.000
211.740 estimate 0.000 0.000 0.000
211.941 estimate 0.000 0.000 0.000
212.160 estimate 0.000 0.000 0.000
212.360 estimate 0.000 0.000 0.000
212.558 estimate 0.000 0.000 0.000
212.779 estimate 0.000 0.000 0.000
212.979 estimate 0.000 0.000 0.000
213.199 estimate 0.000 0.000 0.000
213.399 estimate 0.000 0.000 0.000
213.598 estimate 0.000 0.000 0.000
213.799 estimate 0.000 0.000 0.000
213.999 estimate 0.000 0.000 0.000
214.219 estimate 0.000 0.000 0.000
214.411 unlock
214.419 estimate 0.000 0.000 0.000
214.620 estimate 0.000 0.000 0.000
214.820 estimate 0.000 0.000 0.000
215.020 estimate 0.000 0.000 0.000
215.240 estimate 0.001 0.000 0.000
215.440 estimate 0.012 0.000 0.005
215.644 estimate 0.037 0.000 -0.010
215.846 estimate 0.069 -0.003 0.002
216.063 estimate 0.098 0.000 0.002
216.264 estimate 0.102 0.001 0.080
216.465 estimate 0.107 -0.001 0.237
216.683 estimate 0.101 -0.002 0.414
216.886 estimate 0.101 -0.004 0.562
217.105 estimate 0.105 -0.007 0.733
217.304 estimate 0.102 0.001 0.889
217.523 estimate 0.113 0.005 1.058
217.724 estimate 0.103 -0.003 1.202
217.925 estimate 0.102 0.015 1.365
218.126 estimate 0.110 -0.004 1.506
218.345 estimate 0.107 -0.000 1.570
218.543 estimate 0.109 -0.000 1.569
218.566 lock
218.567 reset
218.743 estimate 0.000 0.000 -0.000
218.941 estimate 0.000 0.000 -0.000
218.965 set_pose 0.000 0.000 -0.117
219.143 estimate 0.000 0.000 -0.117
219.346 estimate 0.000 0.000 -0.117
219.465 unlock
219.563 estimate 0.000 0.000 -0.117
219.784 estimate -0.000 0.000 -0.117
220.003 estimate -0.000 -0.000 -0.117
220.225 estimate -0.001 0.000 -0.166
220.444 estimate 0.003 -0.005 -0.339
220.646 estimate 0.023 -0.008 -0.496
220.842 estimate 0.005 -0.001 -0.657
221.043 estimate 0.022 -0.004 -0.812
221.243 estimate 0.014 -0.005 -0.969
221.444 estimate 0.008 -0.005 -1.120
221.643 estimate 0.014 -0.005 -1.275
221.845 estimate 0.009 -0.011 -1.427
222.045 estimate 0.002 -0.008 -1.588
222.268 estimate 0.019 -0.010 -1.756
222.466 estimate 0.021 -0.019 -1.916
222.667 estimate 0.016 -0.014 -2.065
222.867 estimate 0.017 -0.009 -2.220
223.085 estimate 0.017 -0.009 -2.392
223.303 estimate 0.014 -0.011 -2.561
223.506 estimate 0.031 -0.009 -2.718
223.706 estimate 0.033 -0.003 -2.878
223.905 estimate 0.021 -0.019 -3.026
224.125 estimate 0.010 -0.018 3.090
224.320 estimate 0.013 -0.015 2.982
224.539 estimate -0.021 -0.002 2.965
root@rockrobo:/dev/shm#
SLAM2
root@rockrobo:/dev/shm# head -n 100 SLAM_normal.log
2018/02/20 14:58:04.938 SLAM P1545
171502236 T1550 move:166 [debug] 171502.236 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502256 T1550 move:166 [debug] 171502.256 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502276 T1550 move:166 [debug] 171502.276 unstable: 0 [0.061, 0.000, 0.061] / [1.972, 1.728]
171502296 T1550 move:166 [debug] 171502.296 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502312 T1550 move:166 [debug] 171502.312 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502332 T1550 move:166 [debug] 171502.332 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171502356 T1550 move:166 [debug] 171502.356 unstable: 0 [0.061, 0.000, 0.061] / [1.972, 1.728]
171502372 T1550 move:166 [debug] 171502.372 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502395 T1550 move:166 [debug] 171502.395 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502416 T1550 move:166 [debug] 171502.416 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502432 T1550 move:166 [debug] 171502.432 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502456 T1550 move:166 [debug] 171502.456 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171502472 T1550 move:166 [debug] 171502.472 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171502495 T1550 move:166 [debug] 171502.495 unstable: 0 [0.061, 0.000, 0.061] / [1.972, 1.728]
171502516 T1550 move:166 [debug] 171502.516 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171502536 T1550 move:166 [debug] 171502.536 unstable: 0 [0.061, 0.000, 0.061] / [1.972, 1.728]
171502556 T1550 move:166 [debug] 171502.556 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171502572 T1550 move:166 [debug] 171502.572 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502595 T1550 move:166 [debug] 171502.595 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502616 T1550 move:166 [debug] 171502.616 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171502636 T1550 move:166 [debug] 171502.636 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171502656 T1550 move:166 [debug] 171502.656 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171502672 T1550 move:166 [debug] 171502.672 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171502696 T1550 move:166 [debug] 171502.696 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502716 T1550 move:166 [debug] 171502.716 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502732 T1550 move:166 [debug] 171502.732 unstable: 0 [0.061, 0.000, 0.061] / [1.972, 1.728]
171502756 T1550 move:166 [debug] 171502.756 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502772 T1550 move:166 [debug] 171502.772 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502795 T1550 move:166 [debug] 171502.795 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502812 T1550 move:166 [debug] 171502.812 unstable: 0 [0.061, 0.000, 0.061] / [1.972, 1.728]
171502832 T1550 move:166 [debug] 171502.832 unstable: 0 [0.122, 0.000, -0.122] / [1.972, 1.728]
171502856 T1550 move:166 [debug] 171502.856 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502872 T1550 move:166 [debug] 171502.872 unstable: 0 [0.061, 0.000, 0.061] / [1.972, 1.728]
171502896 T1550 move:166 [debug] 171502.896 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171502912 T1550 move:166 [debug] 171502.912 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502932 T1550 move:166 [debug] 171502.932 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171502956 T1550 move:166 [debug] 171502.956 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171502973 T1550 move:166 [debug] 171502.973 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171502996 T1550 move:166 [debug] 171502.996 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503012 T1550 move:166 [debug] 171503.012 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171503032 T1550 move:166 [debug] 171503.032 unstable: 0 [0.122, 0.000, 0.122] / [1.972, 1.728]
171503056 T1550 move:166 [debug] 171503.056 unstable: 0 [0.061, 0.000, 0.061] / [1.972, 1.728]
171503073 T1550 move:166 [debug] 171503.073 unstable: 0 [0.061, 0.000, 0.061] / [1.972, 1.728]
171503092 T1550 move:166 [debug] 171503.092 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503112 T1550 move:166 [debug] 171503.112 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503132 T1550 move:166 [debug] 171503.132 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503156 T1550 move:166 [debug] 171503.156 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503176 T1550 move:166 [debug] 171503.176 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171503196 T1550 move:166 [debug] 171503.196 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503217 T1550 move:166 [debug] 171503.217 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503236 T1550 move:166 [debug] 171503.236 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171503256 T1550 move:166 [debug] 171503.256 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503273 T1550 move:166 [debug] 171503.273 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503292 T1550 move:166 [debug] 171503.292 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171503312 T1550 move:166 [debug] 171503.312 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503332 T1550 move:166 [debug] 171503.332 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503356 T1550 move:166 [debug] 171503.356 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503376 T1550 move:166 [debug] 171503.376 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171503396 T1550 move:166 [debug] 171503.396 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171503416 T1550 move:166 [debug] 171503.416 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503432 T1550 move:166 [debug] 171503.432 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503456 T1550 move:166 [debug] 171503.456 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503476 T1550 move:166 [debug] 171503.476 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171503496 T1550 move:166 [debug] 171503.496 unstable: 0 [0.061, 0.000, 0.061] / [1.972, 1.728]
171503516 T1550 move:166 [debug] 171503.516 unstable: 0 [0.122, 0.000, 0.122] / [1.972, 1.728]
171503536 T1550 move:166 [debug] 171503.536 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503556 T1550 move:166 [debug] 171503.556 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503576 T1550 move:166 [debug] 171503.576 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171503595 T1550 move:166 [debug] 171503.595 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503616 T1550 move:166 [debug] 171503.616 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503636 T1550 move:166 [debug] 171503.636 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503656 T1550 move:166 [debug] 171503.656 unstable: 0 [0.122, 0.000, 0.122] / [1.972, 1.728]
171503676 T1550 move:166 [debug] 171503.676 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503696 T1550 move:166 [debug] 171503.696 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503716 T1550 move:166 [debug] 171503.716 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503736 T1550 move:166 [debug] 171503.736 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503756 T1550 move:166 [debug] 171503.756 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503776 T1550 move:166 [debug] 171503.776 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171503796 T1550 move:166 [debug] 171503.796 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171503816 T1550 move:166 [debug] 171503.816 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503836 T1550 move:166 [debug] 171503.836 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503856 T1550 move:166 [debug] 171503.856 unstable: 0 [0.061, 0.000, 0.061] / [1.972, 1.728]
171503876 T1550 move:166 [debug] 171503.876 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503896 T1550 move:166 [debug] 171503.896 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503916 T1550 move:166 [debug] 171503.916 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503932 T1550 move:166 [debug] 171503.932 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171503956 T1550 move:166 [debug] 171503.956 unstable: 0 [0.061, 0.000, 0.061] / [1.972, 1.728]
171503974 T1550 move:166 [debug] 171503.974 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171503994 T1550 move:166 [debug] 171503.994 unstable: 0 [0.122, 0.000, 0.122] / [1.972, 1.728]
171504012 T1550 move:166 [debug] 171504.012 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171504032 T1550 move:166 [debug] 171504.032 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171504056 T1550 move:166 [debug] 171504.056 unstable: 0 [0.061, 0.000, -0.061] / [1.972, 1.728]
171504076 T1550 move:166 [debug] 171504.076 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171504096 T1550 move:166 [debug] 171504.096 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171504116 T1550 move:166 [debug] 171504.116 unstable: 0 [0.061, 0.000, 0.061] / [1.972, 1.728]
171504136 T1550 move:166 [debug] 171504.136 unstable: 0 [0.061, 0.000, 0.061] / [1.972, 1.728]
171504156 T1550 move:166 [debug] 171504.156 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171504176 T1550 move:166 [debug] 171504.176 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
171504196 T1550 move:166 [debug] 171504.196 unstable: 0 [0.000, 0.000, 0.000] / [1.972, 1.728]
root@rockrobo:/dev/shm#
NAV (normal ?)
root@rockrobo:/dev/shm# head NAV_normal.log -n 100
111492170 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
112286200 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
112286660 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
113051530 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
113051630 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
113051690 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
113051890 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
113051990 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
113052130 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
113052290 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
113052550 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
113052990 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
113672050 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 10ms
113672650 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 10ms
113673750 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 10ms
113676650 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 10ms
113783000 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
113783060 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
114491530 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 6ms
114504210 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
114504410 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
114504490 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
115112370 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 10ms
115223380 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
115223780 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
115224080 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
115934530 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
115939430 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
115939490 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
115939690 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
115940030 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
115940050 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
116643500 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 7ms
117319130 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
117369130 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
117369430 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
117369730 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
118082480 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
118082560 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
118082580 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
118082700 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
118083240 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
118795570 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
118795850 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
119399450 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 10ms
119399550 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 10ms
119399850 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 10ms
119464650 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 10ms
120218810 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
120219530 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
120219570 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
120219730 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
120820050 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 10ms
120928980 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
120929400 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
120929580 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
120929680 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
120930080 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
121640250 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
122243750 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 10ms
122349560 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
122354160 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
123003870 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 6ms
123059210 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
123059310 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
123059410 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
123059890 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
123769600 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
123769700 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
123770960 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
124478990 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
124479090 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
125084770 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 10ms
125112890 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 10ms
125161980 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 6ms
125896410 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
125896530 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
125897070 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
126480050 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
126605300 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
126605380 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
126605500 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
126605680 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
126605780 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
126606000 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
126610410 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 10ms
127259590 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 6ms
127313730 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
127313870 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
127313930 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
127314070 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
127314530 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
127314990 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
127315590 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
127315690 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
128008880 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
128021960 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
128022380 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
128023740 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 8ms
128711010 T1562 RobotDevice::TriggerCallbacks:470 [warn] Sensor[Gyro:0] callback too long: 6ms
root@rockrobo:/dev/shm#
NAV_TRAP
root@rockrobo:/dev/shm# head -n 100 NAV_TRAP_normal.log
2018/02/19 21:26:05.375 NAV_TRAP P1545
108382672 T1562 OnCurrentData:1155 [info] RAW T:0.30,-0.00 a:2.9/-0.02/0.00 p:0.003 YD:0.02(0) 0.47(408.80) OC:106.0/1(0)/37680,147.0/1(0)/80517 OM[4476,-299,2.87] R[4492,-279]
108382752 T1562 OnCurrentData:1155 [info] RAW T:0.30,-0.00 a:2.9/-0.01/0.18 p:0.005 YD:0.19(0) 0.69(420.00) OC:96.0/1(0)/37707,115.0/1(0)/80545 OM[4454,-293,2.87] R[4469,-272]
108382832 T1562 OnCurrentData:1155 [info] RAW T:0.30,-0.00 a:2.9/0.00/0.00 p:0.004 YD:-0.00(0) 0.55(420.00) OC:121.0/1(0)/37735,114.0/1(0)/80572 OM[4431,-286,2.87] R[4446,-266]
108382912 T1562 OnCurrentData:1155 [info] RAW T:0.30,-0.00 a:2.9/-0.01/0.00 p:0.005 YD:0.01(0) 0.55(420.00) OC:96.0/1(0)/37763,87.0/1(0)/80600 OM[4408,-280,2.87] R[4423,-259]
108382992 T1562 OnCurrentData:1155 [info] RAW T:0.30,-0.00 a:2.9/0.01/0.00 p:0.006 YD:-0.01(0) 0.60(420.00) OC:97.0/1(0)/37790,134.0/1(0)/80627 OM[4385,-274,2.87] R[4401,-253]
108383072 T1562 OnCurrentData:1155 [info] RAW T:0.30,-0.00 a:2.9/-0.01/0.00 p:0.007 YD:0.01(0) 0.65(420.00) OC:94.0/1(0)/37818,138.0/1(0)/80655 OM[4362,-267,2.87] R[4377,-247]
108383152 T1562 OnCurrentData:1155 [info] RAW T:0.30,-0.00 a:2.9/0.02/0.00 p:0.008 YD:-0.02(0) 0.60(420.00) OC:111.0/1(0)/37846,104.0/1(0)/80683 OM[4339,-261,2.87] R[4354,-240]
108383232 T1562 OnCurrentData:1155 [info] RAW T:0.22,-0.00 a:2.9/0.02/0.00 p:0.008 YD:-0.02(0) 0.54(386.40) OC:30.0/1(0)/37872,20.0/1(0)/80709 OM[4317,-255,2.87] R[4333,-234]
108383312 T1562 OnCurrentData:1155 [info] RAW T:0.22,-0.00 a:2.9/-0.01/0.18 p:0.011 YD:0.19(0) 0.33(341.60) OC:39.0/1(0)/37895,59.0/1(0)/80732 OM[4298,-249,2.87] R[4314,-229]
108383392 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/-0.01/-0.18 p:0.008 YD:-0.17(0) 0.46(302.40) OC:56.0/1(0)/37914,95.0/1(0)/80751 OM[4283,-245,2.87] R[4298,-225]
108383473 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/0.04/0.00 p:0.010 YD:-0.04(0) 0.35(294.00) OC:143.0/1(0)/37933,106.0/1(0)/80770 OM[4267,-241,2.87] R[4282,-220]
108383552 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/-0.03/-0.18 p:0.009 YD:-0.15(0) 0.46(282.80) OC:134.0/1(0)/37951,109.0/1(0)/80788 OM[4252,-237,2.87] R[4267,-216]
108383632 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/0.02/0.00 p:0.010 YD:-0.02(0) 0.49(280.00) OC:130.0/1(0)/37969,106.0/1(0)/80807 OM[4237,-232,2.87] R[4252,-212]
108383712 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/0.01/0.18 p:0.011 YD:0.17(0) 0.45(280.00) OC:124.0/1(0)/37987,121.0/1(0)/80826 OM[4221,-228,2.87] R[4237,-208]
108383793 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/-0.01/0.18 p:0.011 YD:0.19(0) 0.64(280.00) OC:120.0/1(0)/38005,93.0/1(0)/80844 OM[4206,-224,2.88] R[4222,-204]
108383872 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/0.01/-0.18 p:0.011 YD:-0.19(0) 0.44(280.00) OC:134.0/1(0)/38024,115.0/1(0)/80862 OM[4191,-220,2.87] R[4206,-199]
108383952 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/-0.01/0.18 p:0.011 YD:0.19(0) 0.64(280.00) OC:111.0/1(0)/38042,121.0/1(0)/80881 OM[4176,-216,2.88] R[4191,-195]
108384032 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/0.01/-0.18 p:0.014 YD:-0.19(0) 0.66(280.00) OC:111.0/1(0)/38061,109.0/1(0)/80899 OM[4160,-211,2.87] R[4176,-191]
108384112 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/-0.00/0.18 p:0.012 YD:0.18(0) 0.44(280.00) OC:119.0/1(0)/38079,132.0/1(0)/80918 OM[4145,-207,2.88] R[4160,-187]
108384193 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/0.00/0.00 p:0.015 YD:-0.00(0) 0.42(280.00) OC:95.0/1(0)/38098,85.0/1(0)/80936 OM[4130,-203,2.88] R[4145,-183]
108384272 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/0.01/-0.18 p:0.014 YD:-0.19(0) 0.45(280.00) OC:103.0/1(0)/38116,126.0/1(0)/80954 OM[4115,-199,2.87] R[4130,-179]
108384352 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/-0.01/0.00 p:0.014 YD:0.01(0) 0.45(280.00) OC:121.0/1(0)/38134,135.0/1(0)/80972 OM[4100,-195,2.87] R[4115,-175]
108384432 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/0.00/0.00 p:0.017 YD:-0.00(0) 0.49(280.00) OC:85.0/1(0)/38153,108.0/1(0)/80991 OM[4084,-191,2.87] R[4099,-170]
108384512 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/0.01/-0.18 p:0.016 YD:-0.19(0) 0.49(280.00) OC:63.0/1(0)/38172,75.0/1(0)/81009 OM[4069,-186,2.87] R[4084,-166]
108384593 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/-0.02/0.00 p:0.017 YD:0.02(0) 0.54(280.00) OC:131.0/1(0)/38190,131.0/1(0)/81028 OM[4053,-182,2.87] R[4069,-162]
108384673 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/0.02/0.00 p:0.015 YD:-0.02(0) 0.57(280.00) OC:79.0/1(0)/38208,132.0/1(0)/81046 OM[4038,-178,2.87] R[4054,-158]
108384753 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/-0.02/0.00 p:0.013 YD:0.02(0) 0.60(280.00) OC:97.0/1(0)/38227,94.0/1(0)/81065 OM[4023,-174,2.87] R[4038,-153]
108384832 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/0.01/0.00 p:0.015 YD:-0.01(0) 0.66(280.00) OC:104.0/1(0)/38245,132.0/1(0)/81083 OM[4008,-170,2.87] R[4023,-149]
108384912 T1562 OnCurrentData:1155 [info] RAW T:0.20,-0.00 a:2.9/-0.01/0.00 p:0.012 YD:0.01(0) 0.63(280.00) OC:83.0/1(0)/38263,92.0/1(0)/81101 OM[3993,-166,2.87] R[4008,-145]
108384991 T1562 OnCurrentData:1155 [info] RAW T:0.16,0.79 a:2.9/0.01/0.00 p:0.014 YD:-0.01(0) 0.70(280.00) OC:36.0/1(0)/38282,55.0/1(0)/81120 OM[3977,-161,2.87] R[3993,-141]
108385072 T1562 OnCurrentData:1155 [info] RAW T:0.16,0.79 a:2.9/0.04/0.00 p:0.012 YD:-0.04(0) 0.80(252.00) OC:18.0/1(0)/38297,192.0/1(0)/81138 OM[3964,-157,2.88] R[3979,-137]
108385152 T1562 OnCurrentData:1155 [info] RAW T:0.16,0.79 a:2.9/0.35/0.54 p:0.011 YD:0.19(0) 0.78(229.60) OC:11.0/1(0)/38308,197.0/1(0)/81159 OM[3950,-154,2.90] R[3966,-134]
108385232 T1562 OnCurrentData:1155 [info] RAW T:0.16,0.79 a:2.9/0.71/0.90 p:0.012 YD:0.19(0) 0.53(224.00) OC:11.0/1(0)/38315,126.0/1(0)/81183 OM[3937,-151,2.95] R[3953,-131]
108385312 T1562 OnCurrentData:1155 [info] RAW T:0.16,0.79 a:3.0/0.88/0.90 p:0.012 YD:0.02(0) 0.75(224.00) OC:21.0/1(0)/38320,119.0/1(0)/81207 OM[3925,-149,3.02] R[3940,-129]
108385393 T1562 OnCurrentData:1155 [info] RAW T:0.16,0.79 a:3.1/0.98/1.08 p:0.015 YD:0.10(0) 0.74(224.00) OC:130.0/1(0)/38323,110.0/1(0)/81231 OM[3913,-148,3.10] R[3929,-128]
108385472 T1562 OnCurrentData:1155 [info] RAW T:0.16,0.79 a:3.2/0.92/1.08 p:0.016 YD:0.15(0) 0.74(224.00) OC:178.0/1(0)/38326,103.0/1(0)/81255 OM[3902,-148,-3.11] R[3917,-128]
108385552 T1562 OnCurrentData:1155 [info] RAW T:0.16,0.79 a:3.2/0.82/0.90 p:0.015 YD:0.08(0) 0.74(224.00) OC:146.0/1(0)/38331,124.0/1(0)/81279 OM[3889,-149,-3.05] R[3905,-129]
108385632 T1562 OnCurrentData:1155 [info] RAW T:0.20,0.52 a:3.3/0.76/0.72 p:0.015 YD:-0.04(0) 0.91(240.80) OC:200.0/1(0)/38338,175.0/1(0)/81303 OM[3876,-151,-2.99] R[3891,-131]
108385712 T1562 OnCurrentData:1155 [info] RAW T:0.20,0.52 a:3.3/0.59/0.54 p:0.016 YD:-0.05(0) 1.06(263.20) OC:88.0/1(0)/38348,100.0/1(0)/81328 OM[3861,-154,-2.93] R[3877,-134]
108385793 T1562 OnCurrentData:1155 [info] RAW T:0.20,0.52 a:3.4/0.55/0.54 p:0.017 YD:-0.01(0) 1.08(280.00) OC:128.0/1(0)/38359,154.0/1(0)/81353 OM[3846,-158,-2.89] R[3862,-137]
108385872 T1562 OnCurrentData:1155 [info] RAW T:0.20,0.35 a:3.4/0.53/0.54 p:0.019 YD:0.01(0) 0.94(280.00) OC:181.0/1(0)/38372,86.0/1(0)/81377 OM[3831,-162,-2.85] R[3846,-142]
108385952 T1562 OnCurrentData:1155 [info] RAW T:0.20,0.35 a:3.5/0.42/0.36 p:0.019 YD:-0.06(0) 0.97(280.00) OC:143.0/1(0)/38385,103.0/1(0)/81400 OM[3816,-167,-2.82] R[3832,-146]
108386032 T1562 OnCurrentData:1155 [info] RAW T:0.16,0.44 a:3.5/0.36/0.54 p:0.019 YD:0.18(0) 1.11(274.40) OC:106.0/1(0)/38399,106.0/1(0)/81423 OM[3801,-172,-2.79] R[3817,-152]
108386112 T1562 OnCurrentData:1155 [info] RAW T:0.16,0.44 a:3.5/0.34/0.36 p:0.020 YD:0.02(0) 1.22(252.00) OC:42.0/1(0)/38412,121.0/1(0)/81444 OM[3788,-177,-2.76] R[3803,-157]
108386192 T1562 OnCurrentData:1155 [info] RAW T:0.16,0.44 a:3.5/0.39/0.36 p:0.022 YD:-0.03(0) 1.24(235.20) OC:73.0/1(0)/38423,147.0/1(0)/81463 OM[3776,-182,-2.73] R[3791,-162]
108386272 T1562 OnCurrentData:1155 [info] RAW T:0.16,0.17 a:3.6/0.43/0.18 p:0.021 YD:-0.25(0) 1.62(224.00) OC:163.0/1(0)/38433,117.0/1(0)/81482 OM[3765,-188,-2.70] R[3780,-167]
108386352 T1562 OnCurrentData:1155 [info] RAW T:0.15,0.09 a:3.6/0.31/0.36 p:0.024 YD:0.05(0) 1.04(223.05) OC:109.0/1(0)/38444,72.0/1(0)/81501 OM[3753,-193,-2.67] R[3768,-173]
108386431 T1562 OnCurrentData:1155 [info] RAW T:0.15,0.09 a:3.6/0.23/0.18 p:0.021 YD:-0.05(0) 0.98(219.26) OC:112.0/1(0)/38455,76.0/1(0)/81517 OM[3743,-199,-2.65] R[3758,-178]
108386512 T1562 OnCurrentData:1155 [info] RAW T:0.15,0.09 a:3.6/0.07/0.18 p:0.022 YD:0.11(0) 0.92(209.56) OC:123.0/1(0)/38468,99.0/1(0)/81533 OM[3732,-205,-2.64] R[3747,-184]
108386594 T1562 OnCurrentData:1155 [info] RAW T:0.14,0.00 a:3.6/0.06/0.18 p:0.024 YD:0.12(0) 1.00(199.79) OC:110.0/1(0)/38480,83.0/1(0)/81547 OM[3722,-210,-2.63] R[3737,-190]
108386672 T1562 OnCurrentData:1155 [info] RAW T:0.13,0.00 a:3.7/0.02/0.00 p:0.024 YD:-0.02(0) 0.83(189.23) OC:72.0/1(0)/38492,82.0/1(0)/81560 OM[3713,-216,-2.63] R[3728,-195]
108386752 T1562 OnCurrentData:1155 [info] RAW T:0.12,0.00 a:3.7/0.03/0.00 p:0.024 YD:-0.03(0) 1.03(181.38) OC:80.0/1(0)/38503,100.0/1(0)/81573 OM[3704,-221,-2.62] R[3719,-200]
108386832 T1562 OnCurrentData:1155 [info] RAW T:0.11,0.00 a:3.7/0.06/0.00 p:0.025 YD:-0.06(0) 0.79(169.44) OC:141.0/1(0)/38514,108.0/1(0)/81584 OM[3695,-225,-2.62] R[3711,-205]
108386913 T1562 OnCurrentData:1155 [info] RAW T:0.11,0.00 a:3.7/0.04/0.18 p:0.024 YD:0.14(0) 0.88(160.73) OC:121.0/1(0)/38524,90.0/1(0)/81595 OM[3688,-230,-2.62] R[3703,-209]
108386992 T1562 OnCurrentData:1155 [info] RAW T:0.10,0.00 a:3.7/0.03/0.00 p:0.024 YD:-0.03(0) 0.80(155.38) OC:101.0/1(0)/38534,100.0/1(0)/81605 OM[3680,-234,-2.62] R[3696,-214]
108387072 T1562 OnCurrentData:1155 [info] RAW T:0.10,0.00 a:3.7/0.02/0.00 p:0.024 YD:-0.02(0) 0.91(147.66) OC:84.0/1(0)/38543,77.0/1(0)/81615 OM[3673,-238,-2.62] R[3689,-218]
108387152 T1562 OnCurrentData:1155 [info] RAW T:0.09,0.00 a:3.7/-0.01/0.00 p:0.025 YD:0.01(0) 0.85(138.94) OC:120.0/1(0)/38552,89.0/1(0)/81624 OM[3666,-242,-2.62] R[3682,-222]
108387232 T1562 OnCurrentData:1155 [info] RAW T:0.09,0.00 a:3.7/0.00/0.18 p:0.024 YD:0.18(0) 0.65(131.28) OC:126.0/1(0)/38561,79.0/1(0)/81633 OM[3660,-246,-2.62] R[3675,-226]
108387312 T1562 OnCurrentData:1155 [info] RAW T:0.08,0.00 a:3.7/0.01/0.00 p:0.024 YD:-0.01(0) 0.74(124.22) OC:76.0/1(0)/38569,83.0/1(0)/81640 OM[3654,-249,-2.62] R[3670,-229]
108387392 T1562 OnCurrentData:1155 [info] RAW T:0.08,0.00 a:3.7/-0.04/0.00 p:0.025 YD:0.04(0) 0.51(117.75) OC:130.0/1(0)/38577,95.0/1(0)/81648 OM[3648,-253,-2.62] R[3664,-232]
108387472 T1562 OnCurrentData:1155 [info] RAW T:0.07,0.00 a:3.7/-0.00/0.00 p:0.024 YD:0.00(0) 0.45(111.81) OC:119.0/1(0)/38584,68.0/1(0)/81655 OM[3643,-256,-2.62] R[3658,-235]
108387552 T1562 OnCurrentData:1155 [info] RAW T:0.07,0.00 a:3.7/-0.01/0.18 p:0.025 YD:0.19(0) -0.33(106.26) OC:107.0/1(0)/38591,112.0/1(0)/81662 OM[3638,-259,-2.62] R[3653,-238]
108387632 T1562 OnCurrentData:1155 [info] RAW T:0.07,0.00 a:3.7/0.00/-0.18 p:0.024 YD:-0.18(0) 0.31(99.00) OC:63.0/1(0)/38598,87.0/1(0)/81668 OM[3633,-261,-2.62] R[3648,-241]
108387712 T1562 OnCurrentData:1155 [info] RAW T:0.06,0.00 a:3.7/-0.00/0.00 p:0.025 YD:0.00(0) 0.38(95.04) OC:116.0/1(0)/38604,160.0/1(0)/81674 OM[3628,-264,-2.62] R[3644,-244]
108387792 T1562 OnCurrentData:1155 [info] RAW T:0.06,0.00 a:3.7/-0.01/0.00 p:0.025 YD:0.01(0) 0.07(90.03) OC:63.0/1(0)/38610,59.0/1(0)/81680 OM[3624,-267,-2.62] R[3639,-246]
108387872 T1562 OnCurrentData:1155 [info] RAW T:0.06,0.00 a:3.7/-0.02/0.00 p:0.025 YD:0.02(0) 0.18(85.28) OC:85.0/1(0)/38616,145.0/1(0)/81686 OM[3620,-269,-2.62] R[3635,-249]
108387951 T1562 OnCurrentData:1155 [info] RAW T:0.05,0.00 a:3.7/-0.00/0.00 p:0.025 YD:0.00(0) 0.25(79.47) OC:57.0/1(0)/38621,62.0/1(0)/81691 OM[3616,-271,-2.62] R[3631,-251]
108388032 T1562 OnCurrentData:1155 [info] RAW T:0.05,0.00 a:3.7/0.00/0.00 p:0.025 YD:-0.00(0) 0.38(75.25) OC:77.0/1(0)/38626,120.0/1(0)/81696 OM[3612,-273,-2.62] R[3627,-253]
108388113 T1562 OnCurrentData:1155 [info] RAW T:0.00,0.00 a:3.7/-0.00/-0.18 p:0.025 YD:-0.18(0) 0.38(75.25) OC:48.0/1(0)/38630,44.0/1(0)/81699 OM[3609,-275,-2.62] R[3625,-254]
108388192 T1562 OnCurrentData:1155 [info] RAW T:0.00,0.00 a:3.7/-0.00/0.00 p:0.026 YD:0.00(0) 0.38(75.25) OC:54.0/1(0)/38631,110.0/1(0)/81700 OM[3609,-275,-2.62] R[3624,-255]
108388271 T1562 OnCurrentData:1155 [info] RAW T:0.00,0.00 a:3.7/0.03/0.00 p:0.030 YD:-0.03(0) 0.38(75.25) OC:137.0/1(0)/38631,106.0/1(0)/81701 OM[3608,-275,-2.62] R[3624,-255]
108388352 T1562 OnCurrentData:1155 [info] RAW T:0.00,0.00 a:3.7/0.00/0.00 p:0.030 YD:-0.00(0) 0.38(75.25) OC:0.0/1(0)/38631,0.0/1(0)/81701 OM[3608,-275,-2.62] R[3624,-255]
108388454 T1562 OnCurrentData:1155 [info] RAW T:0.00,0.00 a:3.7/0.01/0.00 p:0.030 YD:-0.01(0) 0.38(75.25) OC:0.0/1(0)/38631,0.0/1(0)/81701 OM[3608,-275,-2.62] R[3624,-255]
108388512 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:3.7/-0.00/0.00 p:0.030 YD:0.00(0) 0.15(75.25) OC:44.0/1(0)/38631,36.0/1(0)/81701 OM[3608,-275,-2.62] R[3624,-255]
108388592 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:3.7/-0.03/-0.36 p:0.031 YD:-0.33(0) 0.12(75.25) OC:244.0/1(0)/38633,307.0/1(0)/81699 OM[3608,-275,-2.62] R[3624,-255]
108388672 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:3.6/-1.07/-1.26 p:0.030 YD:-0.19(0) -0.43(75.25) OC:235.0/1(0)/38644,193.0/1(0)/81688 OM[3608,-275,-2.69] R[3624,-255]
108388752 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:3.5/-1.50/-1.62 p:0.027 YD:-0.12(0) -0.48(75.25) OC:147.0/1(0)/38661,143.0/1(0)/81672 OM[3608,-276,-2.80] R[3623,-255]
108388832 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:3.4/-1.60/-1.80 p:0.026 YD:-0.19(0) -0.83(75.25) OC:71.0/1(0)/38680,185.0/1(0)/81654 OM[3608,-276,-2.93] R[3623,-255]
108388912 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:3.3/-1.63/-1.44 p:0.021 YD:0.20(0) -0.67(75.25) OC:62.0/1(0)/38698,103.0/1(0)/81636 OM[3608,-276,-3.06] R[3623,-255]
108388993 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:3.1/-1.59/-1.62 p:0.018 YD:-0.02(0) -0.55(75.25) OC:119.0/1(0)/38717,110.0/1(0)/81618 OM[3607,-276,3.10] R[3623,-255]
108389072 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:3.0/-1.59/-1.80 p:0.013 YD:-0.21(0) -0.24(75.25) OC:101.0/1(0)/38735,154.0/1(0)/81599 OM[3608,-276,2.97] R[3623,-255]
108389153 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:2.9/-1.53/-1.80 p:0.008 YD:-0.27(0) -0.42(75.25) OC:84.0/1(0)/38753,181.0/1(0)/81581 OM[3608,-276,2.86] R[3625,-256]
108389232 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:2.8/-1.59/-1.80 p:0.005 YD:-0.21(0) -0.17(75.25) OC:84.0/1(0)/38771,114.0/1(0)/81563 OM[3608,-276,2.74] R[3625,-256]
108389312 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:2.6/-1.57/-1.62 p:-0.000 YD:-0.05(0) -0.35(75.25) OC:86.0/1(0)/38789,160.0/1(0)/81545 OM[3608,-276,2.61] R[3625,-256]
108389392 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:2.5/-1.60/-1.80 p:-0.003 YD:-0.19(0) -0.10(75.25) OC:88.0/1(0)/38807,121.0/1(0)/81526 OM[3608,-276,2.49] R[3625,-256]
108389472 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:2.4/-1.55/-1.62 p:-0.007 YD:-0.07(0) -0.38(75.25) OC:127.0/1(0)/38825,121.0/1(0)/81508 OM[3608,-276,2.36] R[3625,-256]
108389553 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:2.3/-1.59/-1.62 p:-0.011 YD:-0.03(0) -0.20(75.25) OC:128.0/1(0)/38843,150.0/1(0)/81490 OM[3608,-276,2.23] R[3625,-256]
108389632 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:2.1/-1.58/-1.44 p:-0.013 YD:0.14(0) -0.03(75.25) OC:146.0/1(0)/38861,110.0/1(0)/81472 OM[3608,-276,2.11] R[3625,-256]
108389712 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:2.0/-1.55/-1.44 p:-0.017 YD:0.11(0) -0.14(75.25) OC:110.0/1(0)/38879,149.0/1(0)/81454 OM[3608,-276,1.98] R[3625,-256]
108389792 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:1.9/-1.60/-1.44 p:-0.017 YD:0.16(0) -0.12(75.25) OC:156.0/1(0)/38897,77.0/1(0)/81436 OM[3608,-276,1.86] R[3625,-256]
108389871 T1562 OnCurrentData:1155 [info] RAW T:0.00,-1.57 a:1.8/-1.52/-1.44 p:-0.017 YD:0.09(0) -0.08(75.25) OC:114.0/1(0)/38915,130.0/1(0)/81418 OM[3608,-276,1.73] R[3625,-256]
108389952 T1562 OnCurrentData:1155 [info] RAW T:0.00,0.00 a:1.6/-1.59/-1.62 p:-0.018 YD:-0.03(0) -0.08(75.25) OC:142.0/1(0)/38933,98.0/1(0)/81400 OM[3608,-276,1.61] R[3625,-256]
108390032 T1562 OnCurrentData:1155 [info] RAW T:0.00,0.00 a:1.5/-1.57/-1.44 p:-0.016 YD:0.13(0) -0.08(75.25) OC:107.0/1(0)/38950,101.0/1(0)/81382 OM[3608,-276,1.50] R[3625,-258]
108390112 T1562 OnCurrentData:1155 [info] RAW T:0.00,0.00 a:1.4/-1.39/-1.08 p:-0.015 YD:0.31(0) -0.08(75.25) OC:32.0/1(0)/38965,27.0/1(0)/81367 OM[3608,-276,1.38] R[3625,-258]
108390192 T1562 OnCurrentData:1155 [info] RAW T:0.00,0.00 a:1.3/-0.84/-0.72 p:-0.014 YD:0.12(0) -0.08(75.25) OC:28.0/1(0)/38975,31.0/1(0)/81357 OM[3608,-276,1.30] R[3625,-258]
108390272 T1562 OnCurrentData:1155 [info] RAW T:0.00,0.00 a:1.3/-0.45/-0.18 p:-0.013 YD:0.27(0) -0.08(75.25) OC:0.0/1(0)/38980,0.0/1(0)/81351 OM[3608,-277,1.26] R[3625,-258]
108390352 T1562 OnCurrentData:1155 [info] RAW T:0.04,0.09 a:1.3/0.09/0.00 p:-0.013 YD:-0.09(0) -0.10(73.06) OC:0.0/1(0)/38981,0.0/1(0)/81351 OM[3608,-276,1.26] R[3625,-258]
108390432 T1562 OnCurrentData:1155 [info] RAW T:0.08,0.09 a:1.3/0.08/0.18 p:-0.013 YD:0.10(0) -0.37(79.44) OC:202.0/1(0)/38981,165.0/1(0)/81353 OM[3608,-276,1.27] R[3625,-257]
108390512 T1562 OnCurrentData:1155 [info] RAW T:0.08,0.09 a:1.3/0.10/0.18 p:-0.014 YD:0.08(0) -0.14(95.20) OC:210.0/1(0)/38985,144.0/1(0)/81358 OM[3609,-272,1.27] R[3626,-253]
root@rockrobo:/dev/shm#
Et player
root@rockrobo:/dev/shm# tail PLAYER_*
==> PLAYER_SERVER_fprintf.log <==
Listening on ports: 6665 Player_quit to true.
Player Quitting.Listening on ports: 6665 Player_quit to true.
Player Quitting.
==> PLAYER_SERVER_normal.log <==
172084340 T1566 PublishSpeed:2983 [debug] Player : Publish speed 0.000000:0.000000 force: 0
172084390 T1566 PublishSpeed:2983 [debug] Player : Publish speed 0.000000:0.000000 force: 0
172084441 T1566 PublishSpeed:2983 [debug] Player : Publish speed 0.000000:0.000000 force: 0
172084491 T1566 PublishSpeed:2983 [debug] Player : Publish speed 0.000000:0.000000 force: 0
172084541 T1566 PublishSpeed:2983 [debug] Player : Publish speed 0.000000:0.000000 force: 0
172084591 T1566 PublishSpeed:2983 [debug] Player : Publish speed 0.000000:0.000000 force: 0
172084641 T1566 PublishSpeed:2983 [debug] Player : Publish speed 0.000000:0.000000 force: 0
172084692 T1566 PublishSpeed:2983 [debug] Player : Publish speed 0.000000:0.000000 force: 0
172084742 T1566 PublishSpeed:2983 [debug] Player : Publish speed 0.000000:0.000000 force: 0
172084792 T1566 PublishSpeed:2983 [debug] Player : Publish speed 0.000000:0.000000 force: 0
==> PLAYER_fprintf.log <==
0000110653.701 0 6665 sonar 00 001 001 1 65.534
0000110653.701 0 6665 position2d 01 001 001 +00.007 -00.001 -3.047 +13.758 +01.160 -02.490 0
0000110653.721 0 6665 position3d 04 001 001 +13.7585 +1.1601 -2.4968 +0.4664 -0.0027 -0.3635 +0.4321 -0.8528 +0.3450 -0.8246 +0.0000 +0.0000 0
0000110653.721 0 6665 position3d 00 001 001 +13.7585 +1.1601 -2.4968 -0.0380 +0.0219 +0.3450 -0.3442 -0.6273 +9.7061 +72549.0000 +133014.0000 -0.3635 0
0000110653.721 0 6665 position3d 01 001 001 +13.7585 +1.1601 -2.4968 -0.0380 +0.0219 +0.3450 -0.3442 -0.6273 +9.7061 +72549.0000 +133014.0000 -0.3635 0
0000110653.721 0 6665 ir 00 001 001 1 0.055
0000110653.721 0 6665 sonar 00 001 001 1 65.534
0000110653.721 0 6665 position2d 01 001 001 +00.007 -00.001 -3.054 +13.758 +01.160 -02.497 0
0000110653.741 0 6665 position3d 04 001 001 +13.7585 +1.1601 -2.5040 +0.4664 -0.0089 -0.4093 +0.4321 -0.8528 +0.3370 -0.8246 +0.0000 +0.0000 0
0000110653.741 0 6665 position3d 00 001 00
root@rockrobo:/dev/shm#
Là l'Aspi est Charging (je précise, car ca bouge encore dans les log, mais moins que quand il est en Cleaning).