Bonjour à tous,
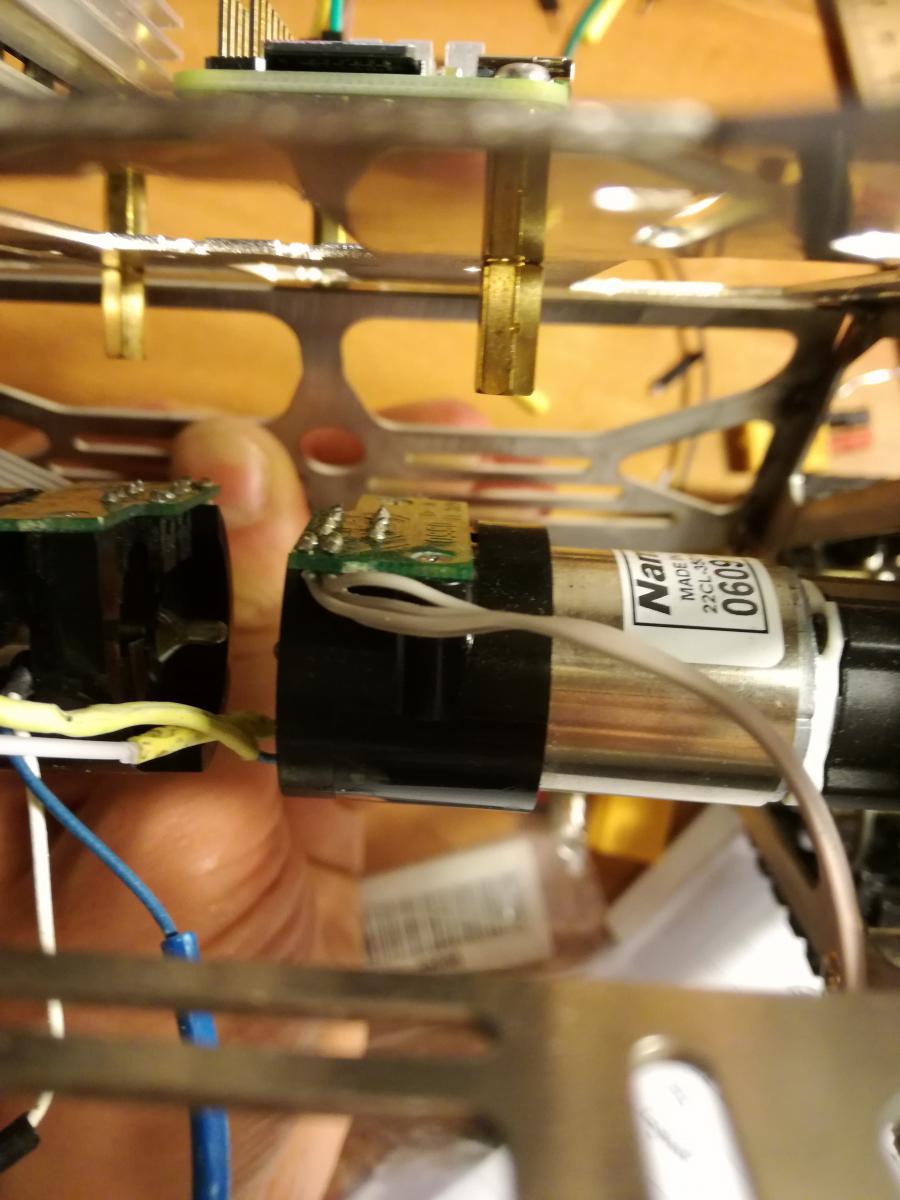
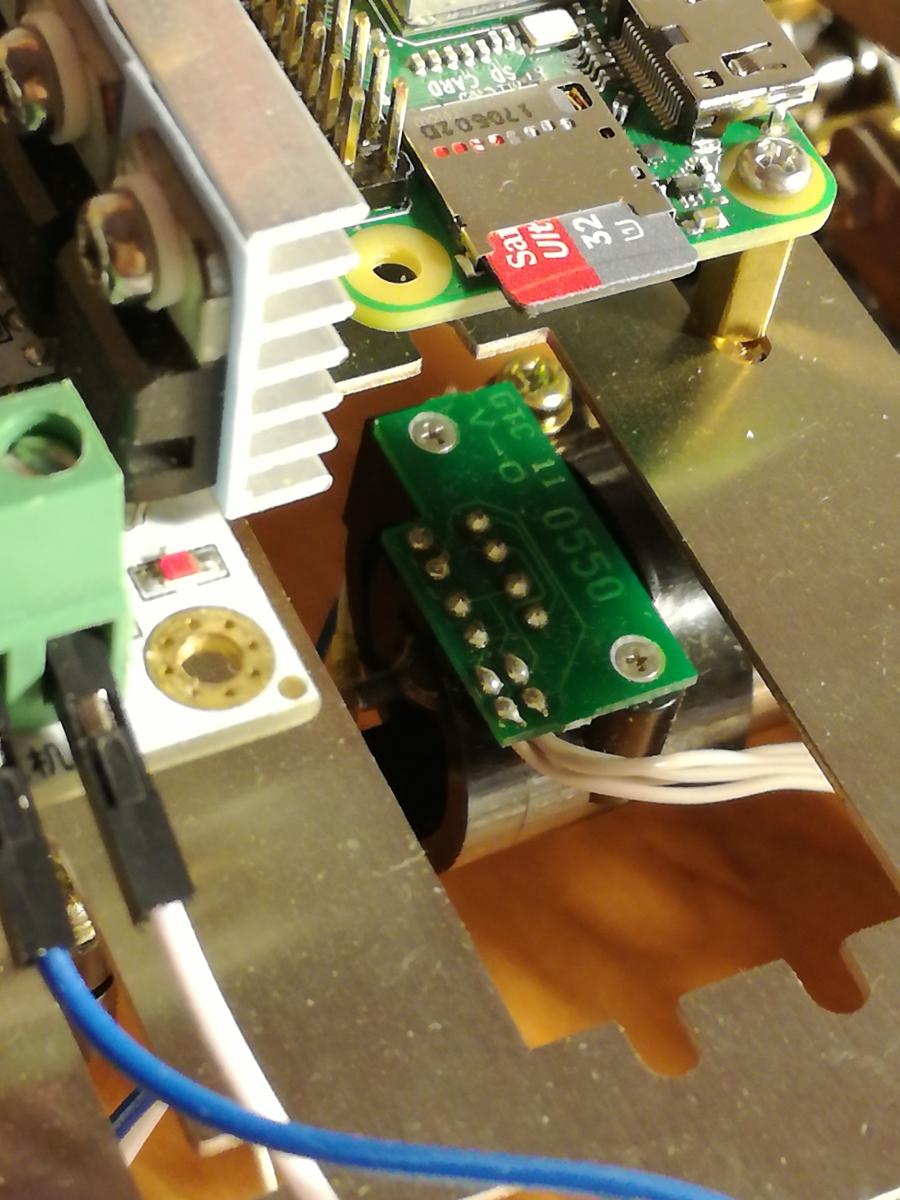
J'ai une question concernant le kit chenilles moteurs encodeurs.
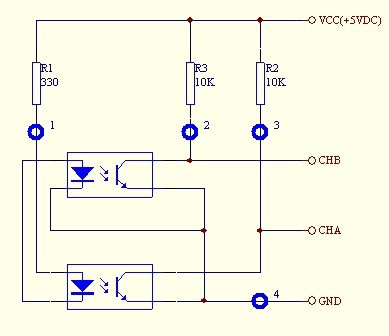
L'image qui explique les connexions des encodeurs a disparu ! Du coup je suis un peu bloqué pour les connecter...
J'imagine qu'elles doivent être assez similaire que sur ce kit là.
Serait-il possible d'avoir les spécifications complètes des moteurs et des encodeurs pour ce kit ?
Merci d'avance pour votre aide!
Nicofarr


 :
: Je pense qu'une fois que je serai certain des connexions, ils seront tout a fait exploitables.
Je pense qu'une fois que je serai certain des connexions, ils seront tout a fait exploitables.