Voilà un UBEC qui me parait assez sympa. Il a 2 tensions de sorties sélectionnables, avec 10A disponibles et un courant de pointe à 20A.
https://fr.aliexpres...#3468#15618#930
Le seul petit problème, c'est qu'il ne dispose de 12V en sortie . . . Mais je pense que c'est une bonne base de recherche.
Si je trouve quelque chose, je te fais signe.
Sinon, peut-être que cela pourrait te suffire, Convertisseur de tension réglable (robot-maker.com)
Je me doutais bien qu'il allait falloir ce genre de carte. Ce n'est pas aussi simple que je le pensais  Il me semble que la cartes Phidgets que j'utilise pour les servos a ce genre de système : c'est 12V en entrée mais je peux choisir de façon programmatique entre 3 tensions de sortie pour envoyer aux servos.
Il me semble que la cartes Phidgets que j'utilise pour les servos a ce genre de système : c'est 12V en entrée mais je peux choisir de façon programmatique entre 3 tensions de sortie pour envoyer aux servos.
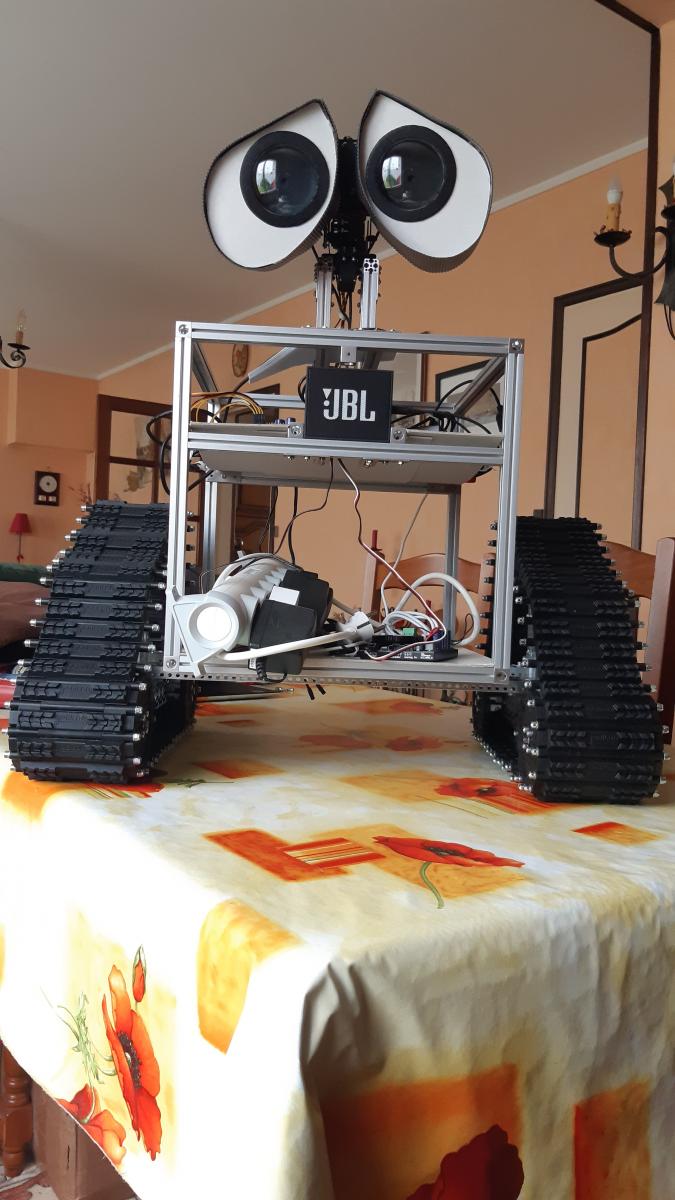
Pour Sandro : il se peut que je rajoute 2 ou 4 servos pour les bras (il n'en a toujours pas  ) et éventuellement une webcam supplémentaire qui est déjà en place mais non branchée pour peut-être gérer la vision stéréo ...
) et éventuellement une webcam supplémentaire qui est déjà en place mais non branchée pour peut-être gérer la vision stéréo ...
Voici les liens vers les spécifications des différents composants :
- Contrôleur Moteur DC Phidgets (onglet spécifications) x 2
- Contrôleur Servo Phidgets (onglet spécifications)
- VINT Hub Phidgets pour centraliser les contrôleurs Phidgets (onglet Spécifications)
- Moteur goBilda 84RPM x 2
- Servo Hitec HS-645MG x4 (voire x8)
- Microphone Array ReSpeaker (alimenté par le hub USB)
- Webcam Hercules HD Twist (alimenté par le hub USB) : je ne trouve rien concernant l'alimentation / consommation
- Enceinte JBL Go (auto-alimentée par batterie) (dans Caractéristiques générales)
- Hub USB 7 port Belkin alimenté : je ne trouve rien concernant l'alimentation / consommation, je prendrai en photo l'adapteur car il doit y avoir quelques infos
Je pense avoir fait le tour. J'espère qu'il ne va pas y avoir de grosses surprises!