Je ne voulais pas ouvrir un nouveau sujet pour la télécommande, pour l'électronique cette fois-ci mais j'ai changé d'avis.
J'ai besoin de 12V pour alimenter mon écran LCD, je pensais prendre une batterie 12V NiMH mais je pense qu'il serait plus judicieux de prendre deux batteries 7,2V, déjà en en mettant une de chaque côté de la télécommande ça l'équilibrera mais aussi parce qu'avec 14,4V et un régulateur 12V (circuit à voir plus tard) même si les batteries ont un peu plus faible j'aurai encore 12V alors qu'avec une seule batterie 12V je pourrais bien avoir des soucis plus rapidement.
Il me faudra aussi un convertisseur 12V/5V mais ça ce n'est pas un soucis, je crois même qu'il y en a un dans la boutique...
Donc pour les commande je vais utiliser ça :

J'en ai 2.
et ça :

J'en ai 1.
J'ai un module comme ça :

ça ne me convient pas pour ici mais je ferai avec.
La carte Elexol avec les interruteurs, poussoirs et LEDs :

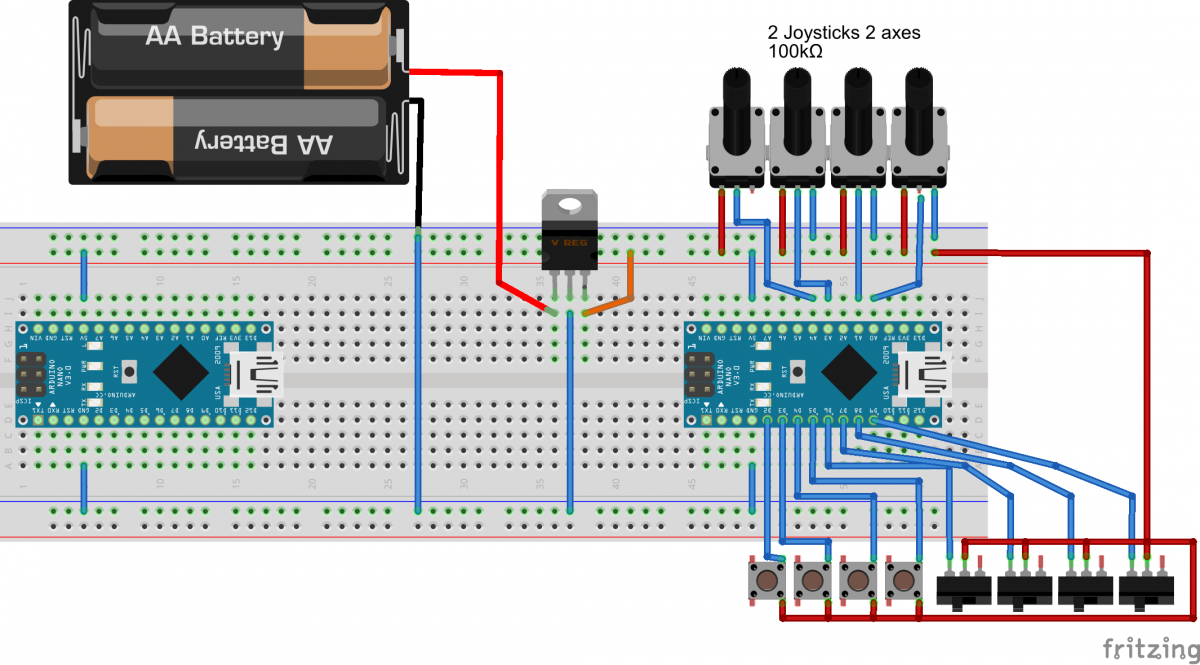
J'ai aussi deux joysticks de télécommande :
(pas de photos  )
)
Je vais utiliser un écran LCD de 7" pour la télémétrie et l'affichage de toutes les infos nécessaires.
Pour contrôler tout ça j'utiliserai un RPI et peut-être une carte d'extension.


 ) donc je peux peut-être en utiliser deux ?
) donc je peux peut-être en utiliser deux ? ) et je les mettrais en slave I2C ou SPI selon ta préférence =) SPI tu auras quelques fils en plus mais c'est plus rapide.. I2C c'est très facile à mettre en place...
) et je les mettrais en slave I2C ou SPI selon ta préférence =) SPI tu auras quelques fils en plus mais c'est plus rapide.. I2C c'est très facile à mettre en place...