Oracid a tout dit , mais je vais en rajouter un peu
Brushless : sans balais donc, ces moteurs doivent êtres pilotés, ils ont au moins 3 fils, et il faut faire "tourner" le courant/tension dans le bon sens
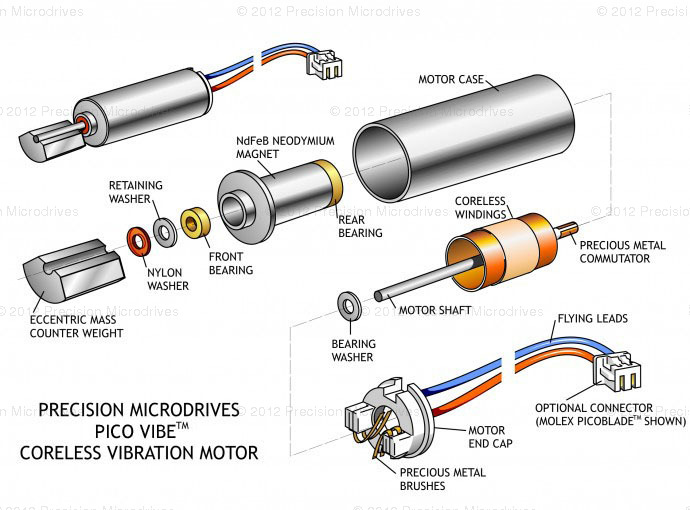
Coreless : c'est comme un petit moteur classique, sauf qu'au lieu d'avoir le bobinage sur un moyeu en acier, le bobinage est creux (il est collé sur lui-même)
et les aimants sont au centre. cette disposition permet d'avoir plus de puissance pour une dimension identique à un moteur à balais classique puisque le
bras de levier est plus important