Objectif : 4mois pour réaliser la bête de A à Z.
Mai 2018 : Lecture, prise de note, budget, achat et conception.
Je serai en mesure de vous lister les liens principaux pour les intéressés 
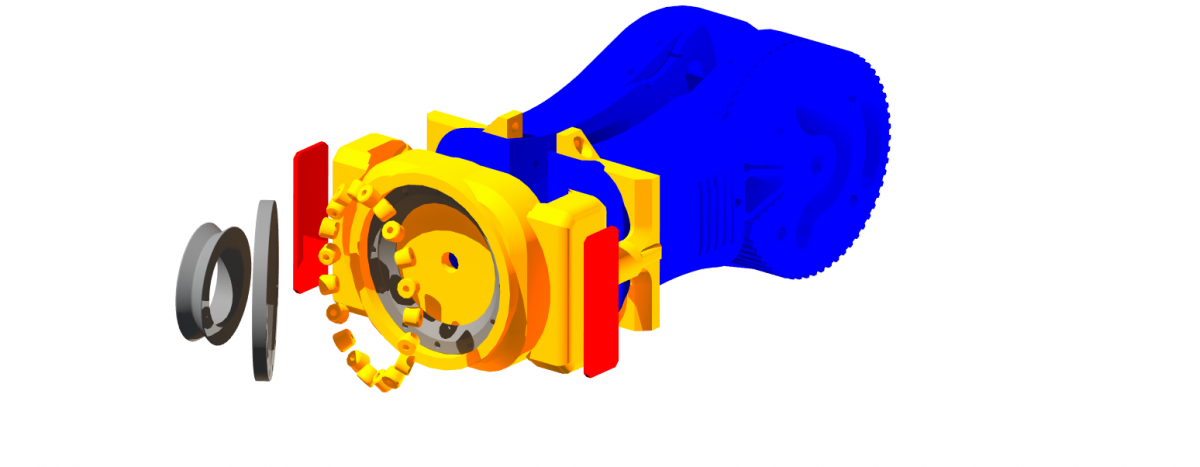
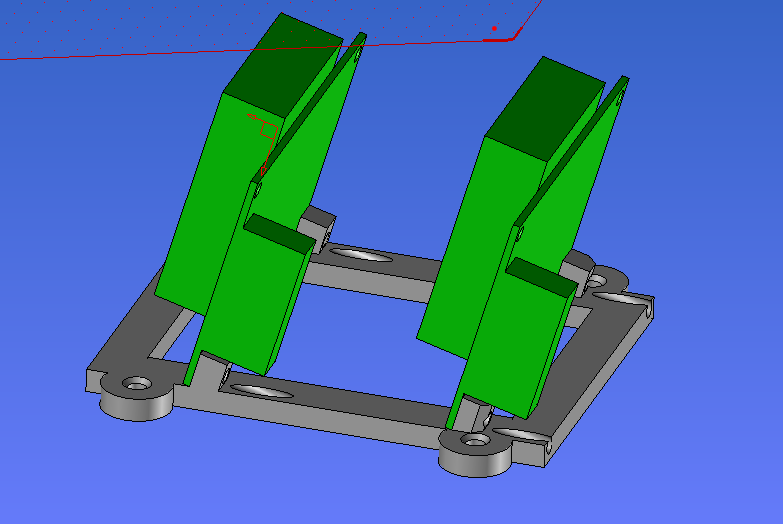
Conception des nouvelles pièces afin de renforcer la structure.
Conception du support permettant le transport
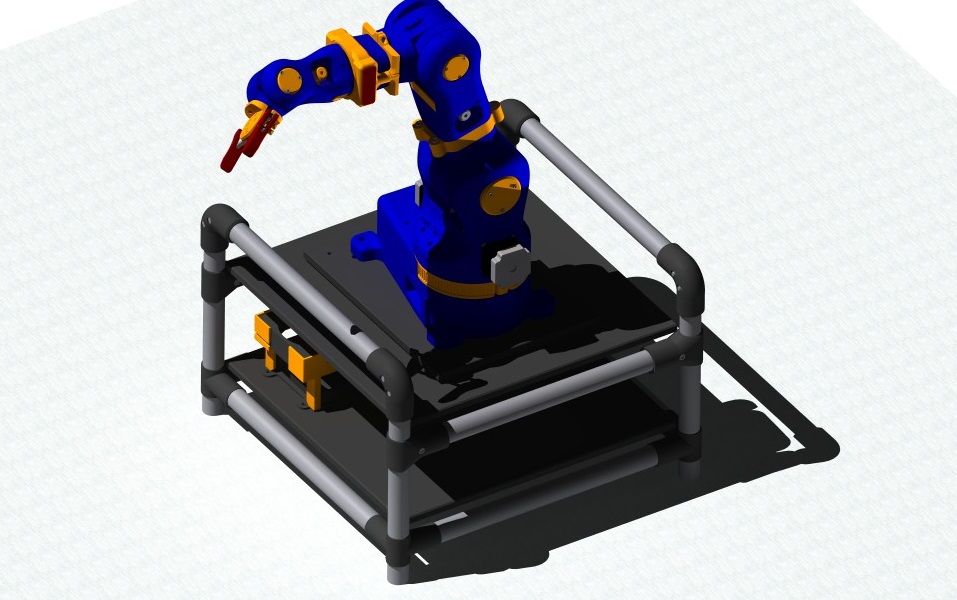
Le système est composé de deux étages. Le premier sert à la partie électronique et le deuxième sert pour le bras robotisé. L’ensemble est pourvu de poignées de transport.
Juin 2018 : Impression 3D, Montage, Câblage.
Les éléments ont été imprimés en 3D ( PLA Noir) , le processus finition est le suivant :
1- Ponçage au grain 180
2-Ponçage au grain 320
3-Enduit carrossier
4-Ponçage grain 320
5-Couche d'accroche x3
6-Couche de peinture acrylique bleu x2

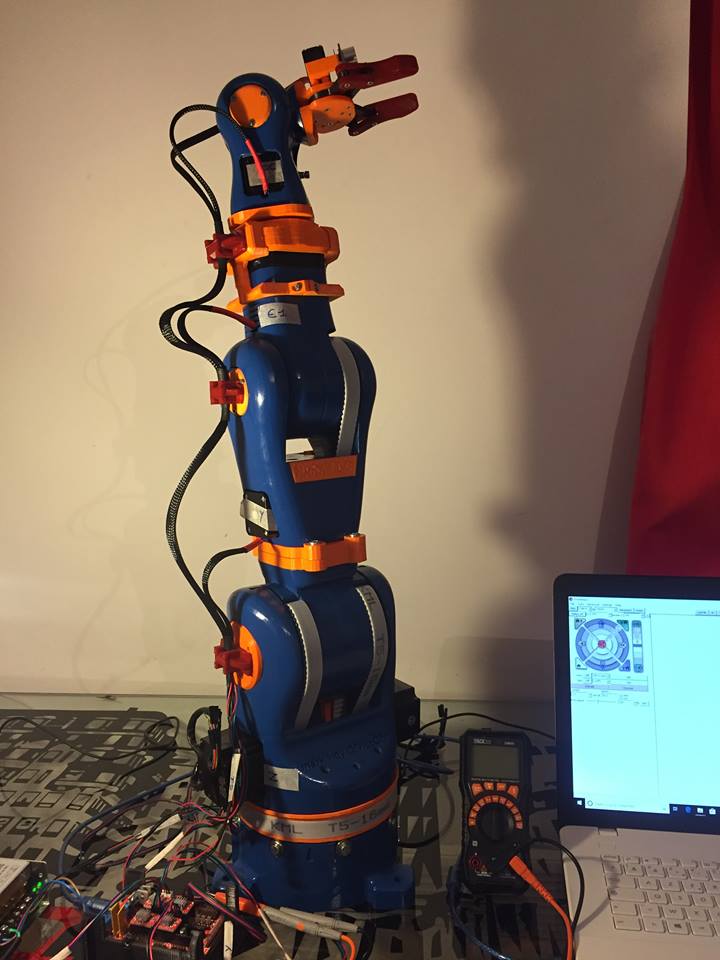
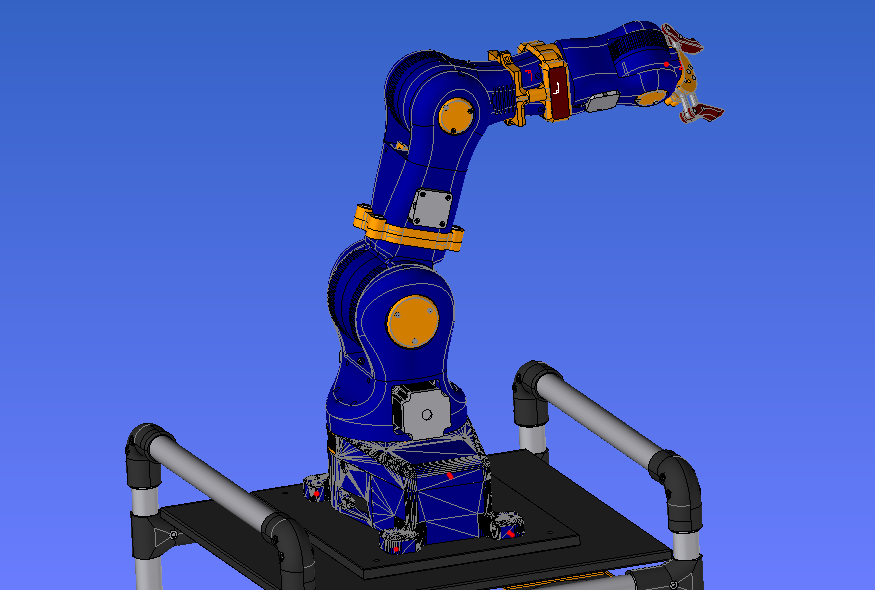
Assemblage des éléments
Cablage


Structure complète à 93% 
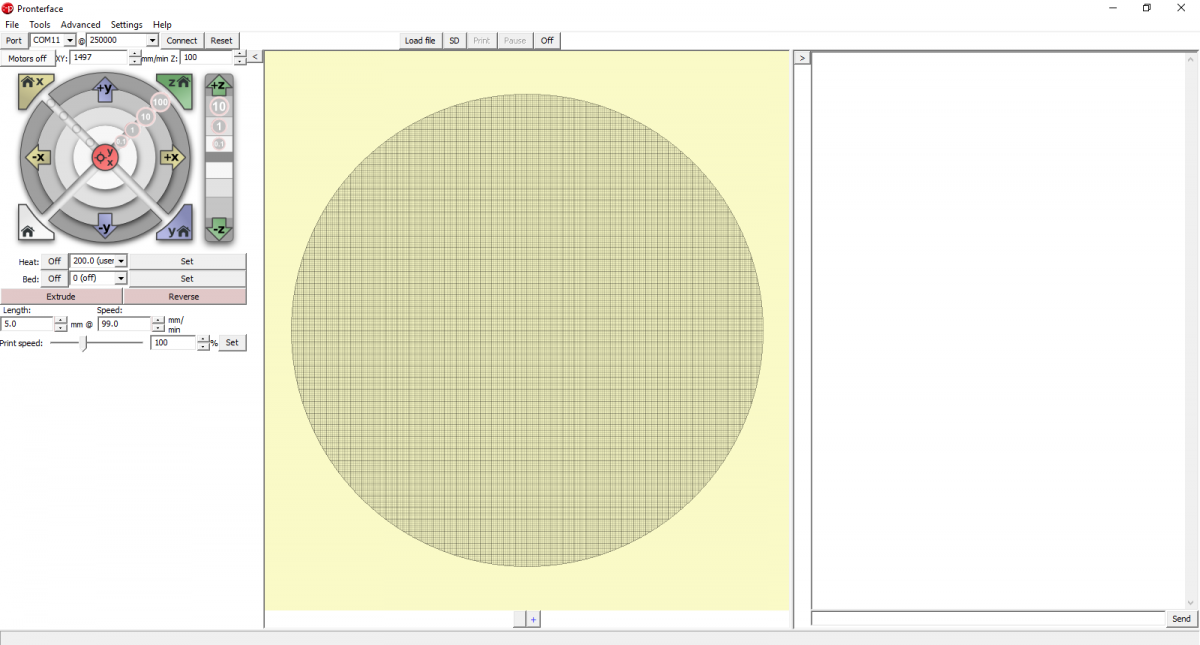
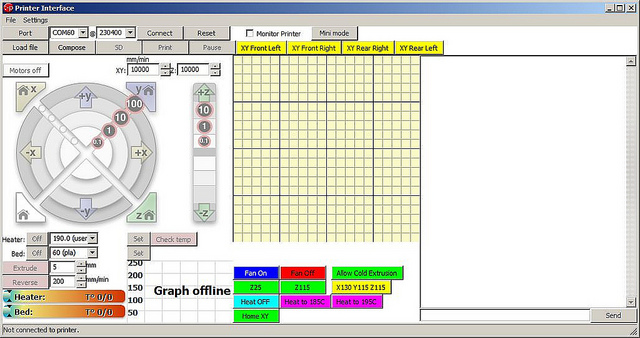
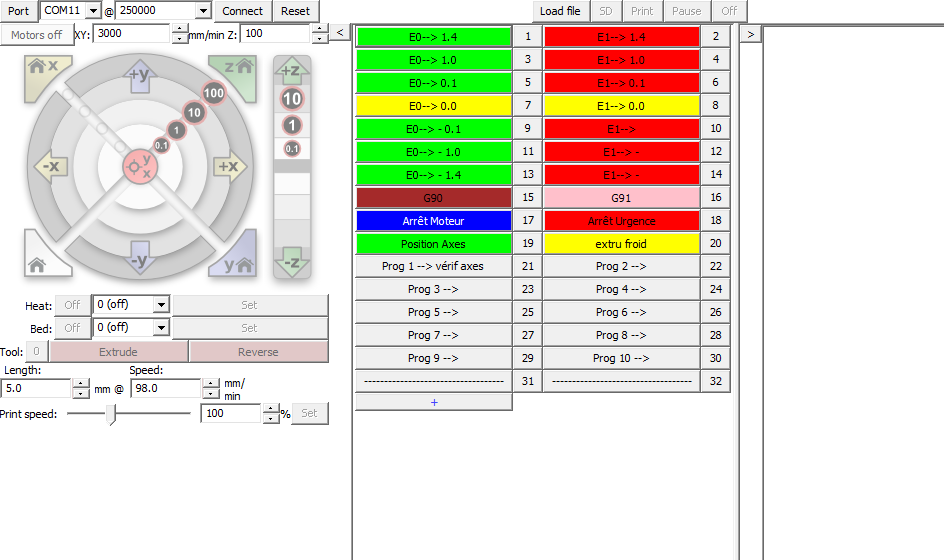
Juillet 2018 : Electronique, Commande via pronterface.
Et là on arrive au gros du problème... hardware et software 

Comment tout connecter sans tout casser ???
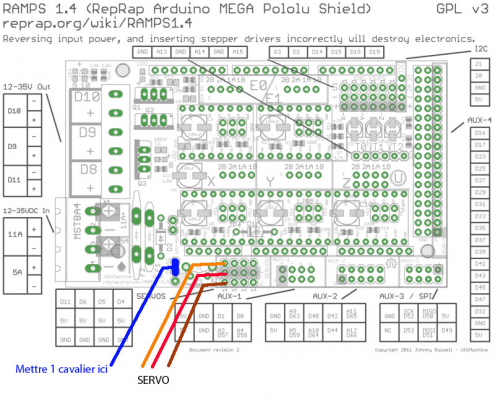
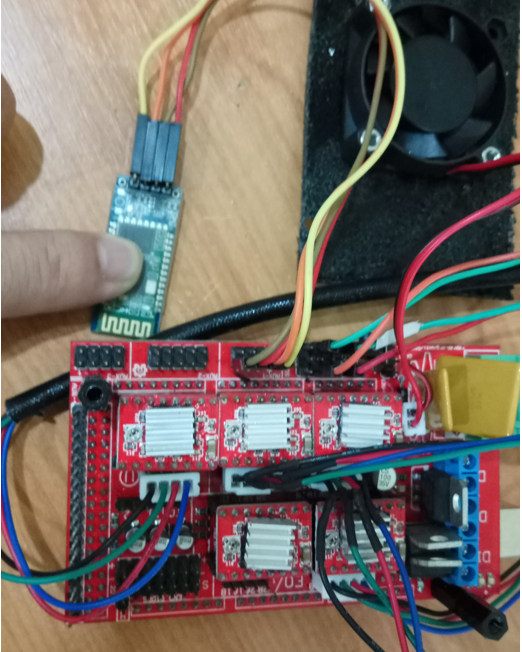
Concrètement je branche l'ensemble de mes moteurs sur une ramps 1.4. on à donc
1 servo moteur --> ramps 1.4 -->arduino--> Marlin --> Printerface
1 nema 14 --> driver a4988 --> ramps 1.4 --> arduino--> Marlin --> Printerface
3 nema 17 --> driver a4988 --> ramps 1.4 --> arduino--> Marlin --> Printerface
2 nema 23 --> driver tb6560--> ramps 1.4 --> arduino--> Marlin --> Printerface
A partir de ce moment il va me falloir de l'aide et malheureusement mes recherches ne donnent rien
Problème :
Comment connecter mon nema 14 à ma ramps ?
Le ( ou la, je ne sais pas) data sheet du moteur indique cela :
7.4v 0.28 a/phase
Or ma ramps est alimentée en 12V 5A donc je ne risque pas de faire chauffer mon moteur ? Je ne souhaite pas faire brûler mes bobines...

Reste à faire :
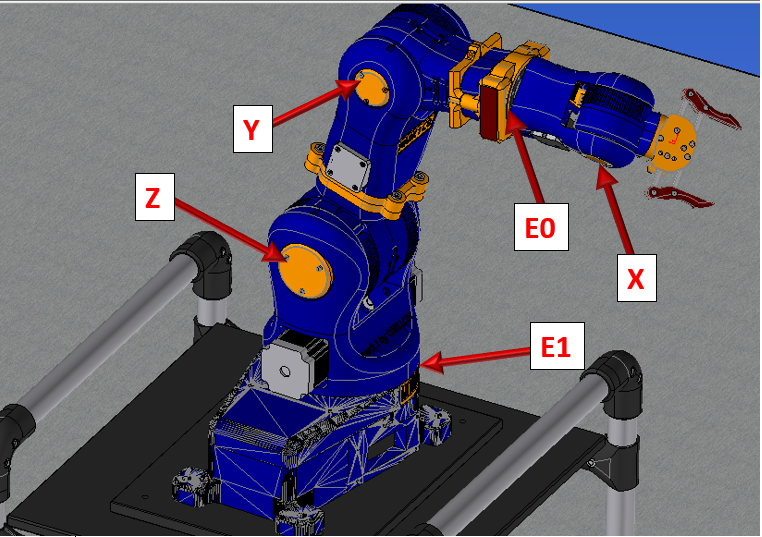
1-Connecter le servo moteur
2-Connecter les nema 17
3-Connecter les nema 23
4-s'amuser un peut.
Donc voilà, si quelqu'un à la réponse à ma question il aura toute ma gratitude.