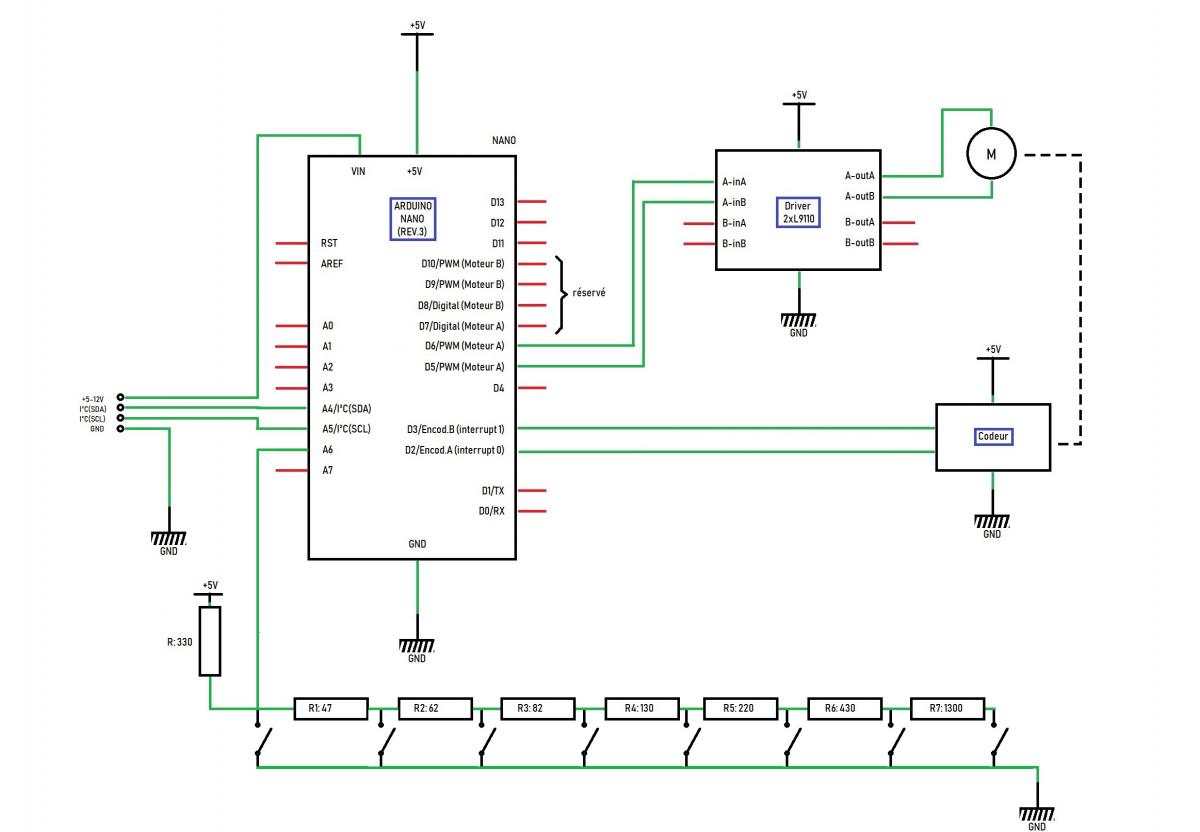
Donc pour câbler en dur les 7 bits d'adressage de la norme I²C ainsi que l'état (Maître ou Esclave), j'ai pensé qu'un diviseur de tension pourrait permettre de n'utiliser qu'une entrée pour vérifier l'état des 8 boutons d'un contacteur DIP8...
au niveau du schéma je pense que ça pourrait donner ça (une fois de plus je ne me suis pas cassé la tête, j'ai tout repiqué ici, et comme dans notre cas c'est des interrupteurs je peux même passer sur tout ce qui concerne la gestion des "transitoires") :
Vous pensez que c'est une bonne solution ?
PS:
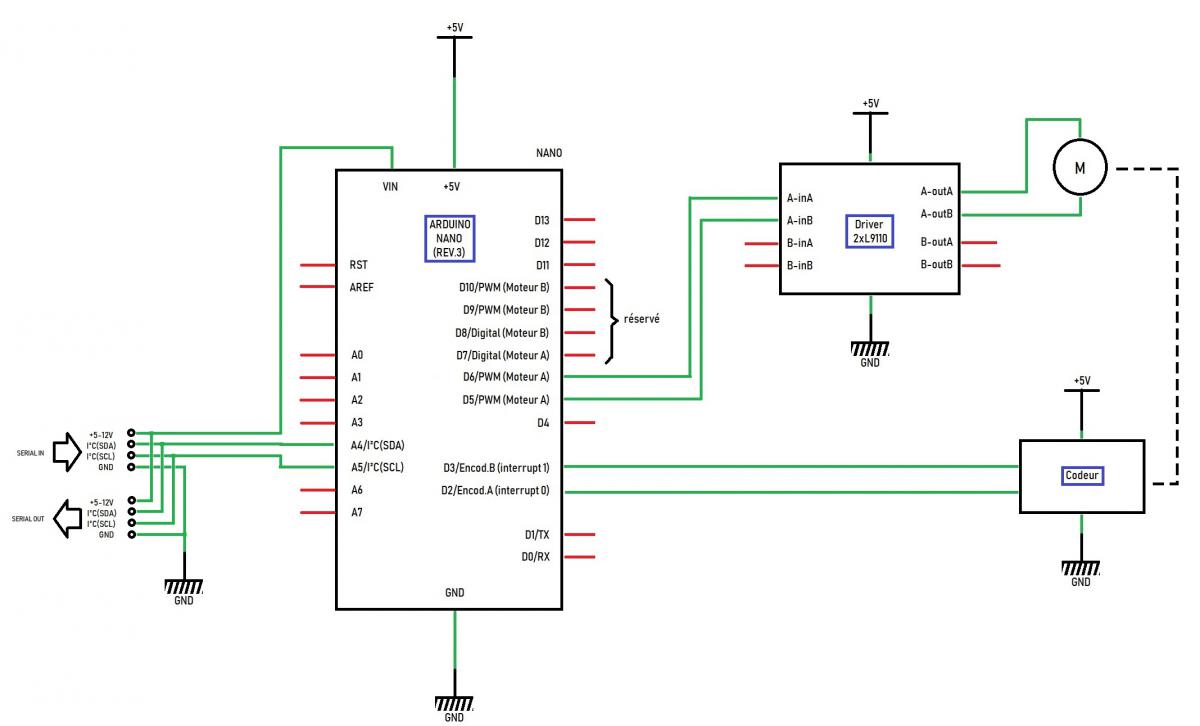
En regardant mon schéma, je me demande si je n'aurai pas dû connecter le VCC du Driver au Vin du nano (ou plus précisément au VCC du connecteur I²C) plutôt qu'au +5V du nano...
re-PS:
ha ben non ! avec cette méthode on ne peux pas détecter deux inters fermés en même temps..
re-re-PS:
je suis repassé par l'excellent site d'openclassrooms pour voir comment on fait une matrice d'interrupteurs et j'en ai conclu que dans notre cas, le mieux serait d'utiliser un DIP6, comme l'ID en I²C se code sur 7 bits, je pense que c'est un bon compromis de considérer le bit de poids fort comme toujours à 1 et de n'intervenir que sur les 6 bits restants.. (ce qui permet encore de placer plus de 50 moteurs par projet).
Le montage nécessite 6 diodes, 2 résistances et une barre d'interrupteurs DIP6... il occupe 3 sorties et 2 entrées sur le nano..
Je vais mettre le schéma au propre.. pour le moment j'ai griffonné ça :