Je vous expose mon petit projet " un robot quadropods " la 2éme version de celui la ( que j'ai réalisé y a 1 ans ), j'ai déjas commencé il y a 2 mois
http://www.dailymotion.com/user/neorobotane/video/x3wx8f_hexapods-by-neo_creation

maintenant, vous dit surement: il appelle ça un robot ??
et oui je sais avec 3 relai et ni micro-contrôleur ni de servo-moteur c'est plus un jouet !
beh...comme je l'est dit sur mon blog, j'ai juste pas les moyens (je suis un étudient algérien qui vas a la fac parce qu’il a du temps à perdre !
 )
) ici trouver un micro-contrôleur c'est comme trouver un trésors! (et de tout façon à cette époque je ne savais pas encore programmer) et pour les servo-moteur ça existe pas ce truc ici !!!
depuis un ans j'ai progressé (maintenant je sais un peu programmer) *merci bigonoff* .
mon but dans ce nouveau projet et de réalisé un robot digne de ce noms, programmable! avec un micro-contrôleur j'ai réussi a trouver un 16f84 (rien d extraordinaire)
et pour les servo-moteurs voila ce que j'ai fait !
j'ai acheter 8 jouets "made in china" les voila !

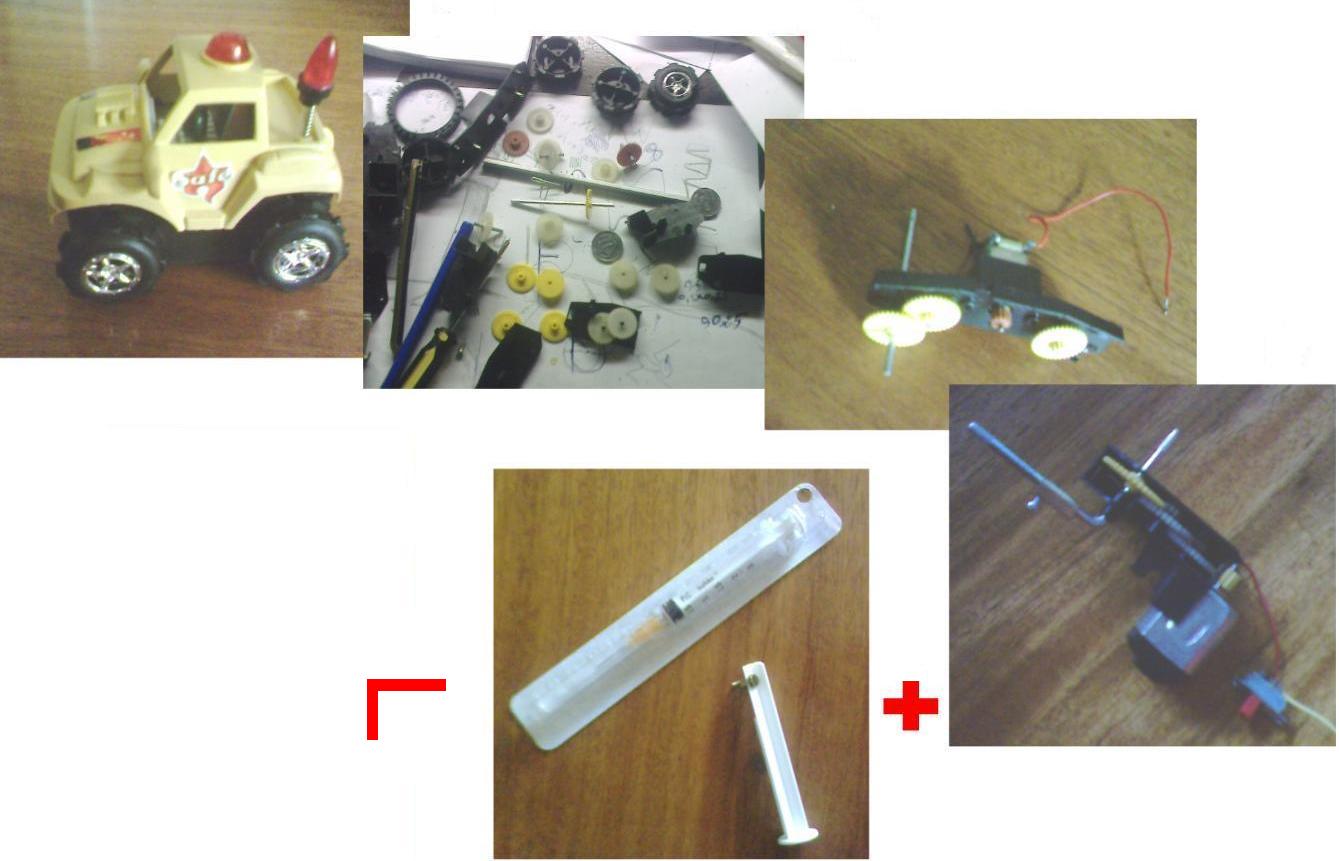
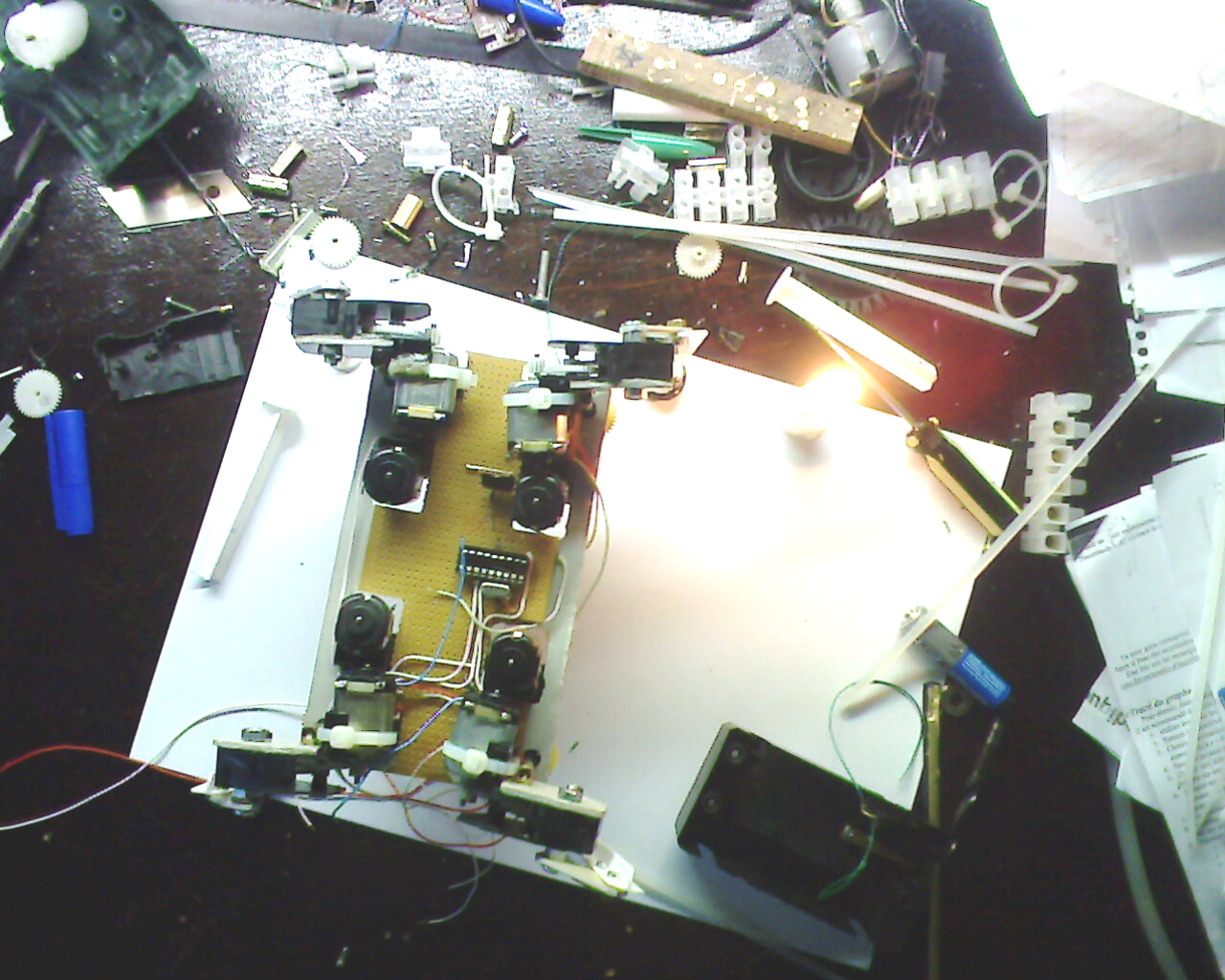
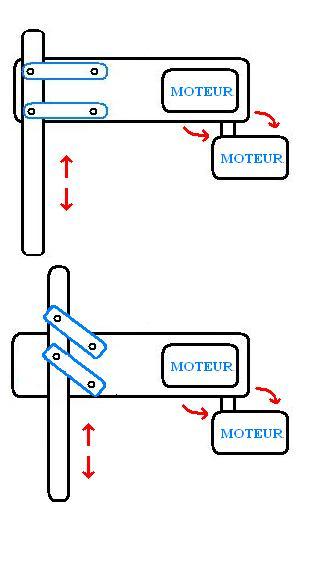
les pattes (une injection) du robot vont ressembler a ça
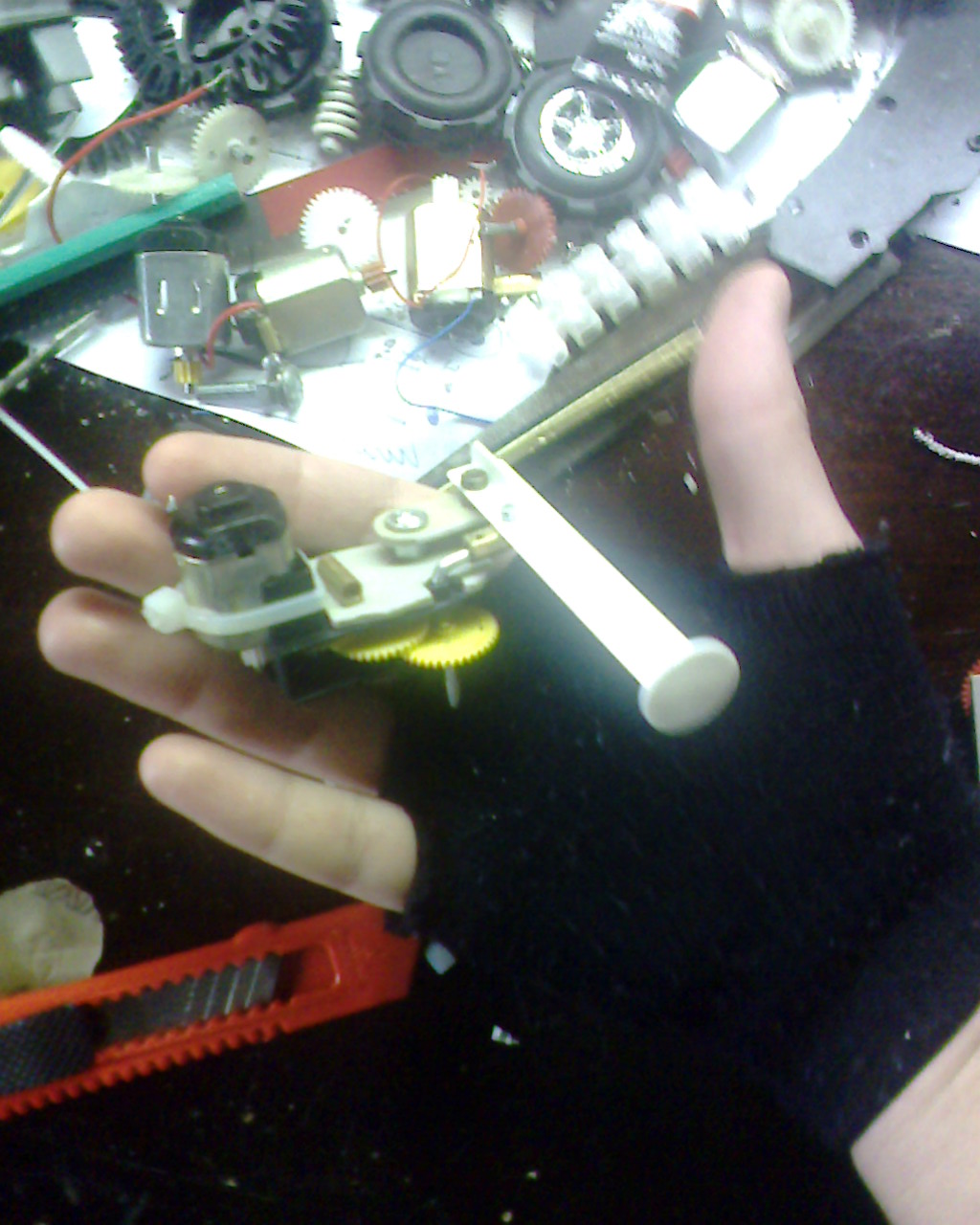
la parti mécanique du servo et plutôt réussi
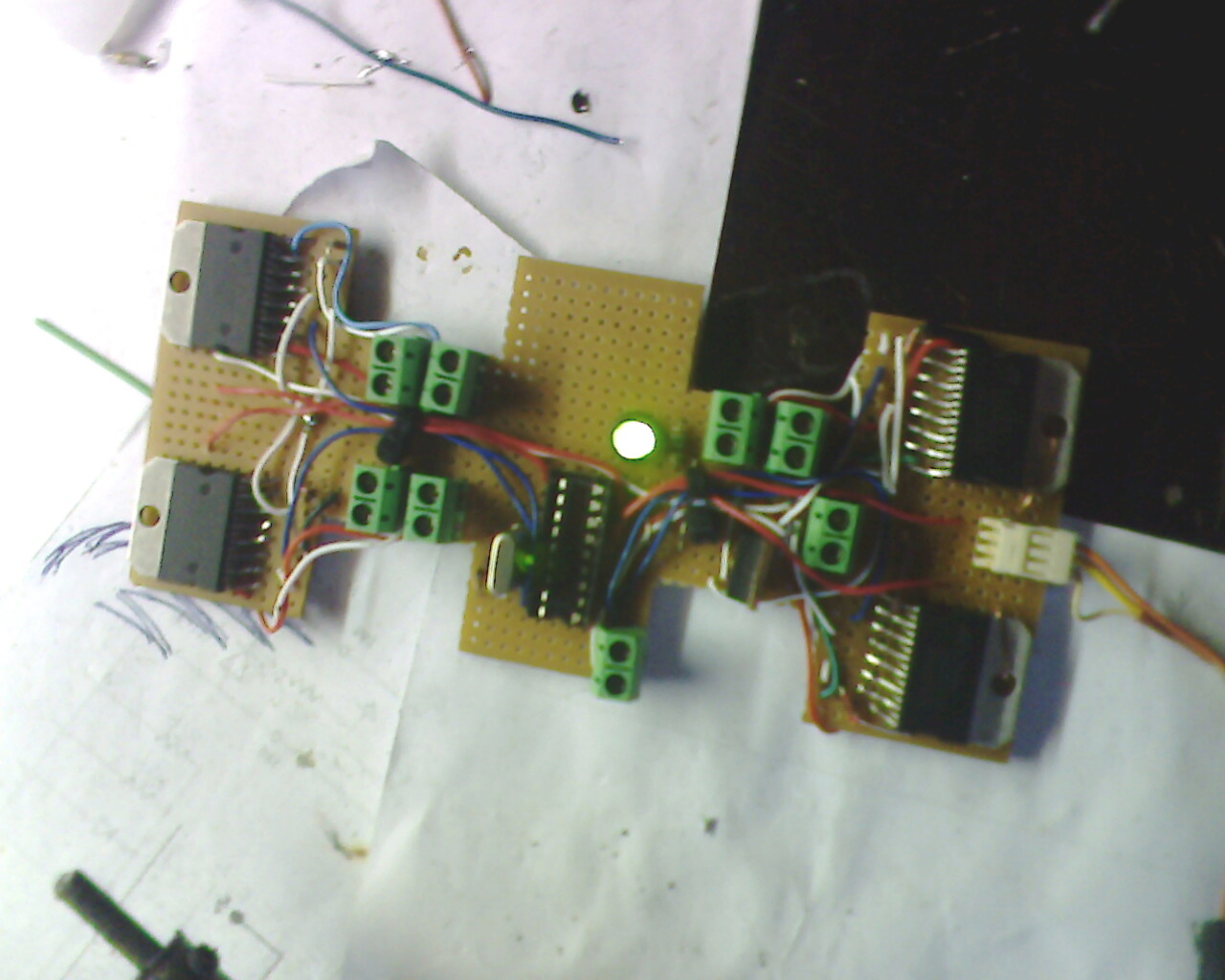
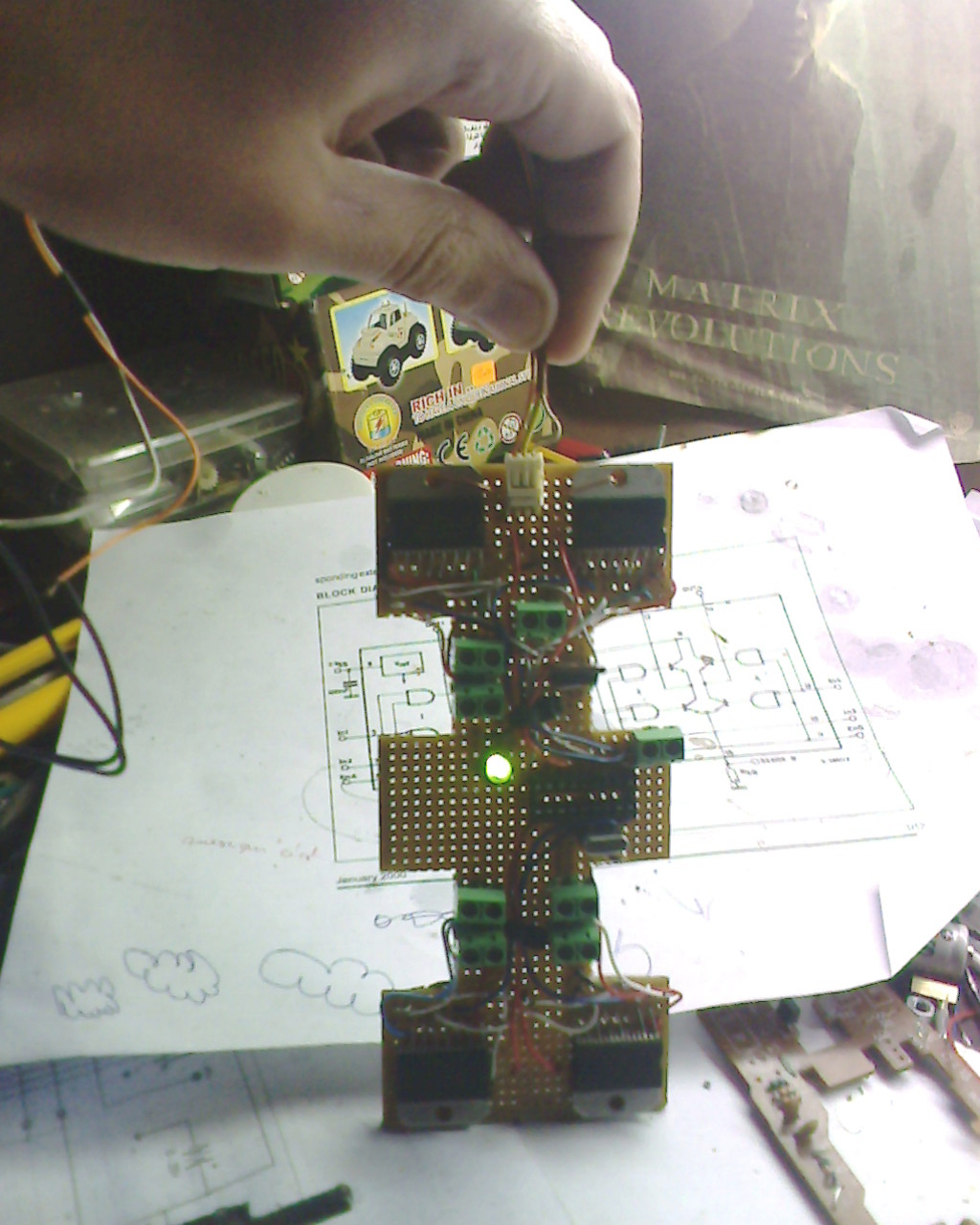
 (vous on dit quoi?) il me reste la parti électronique j'ai cherché un L298, j l est trouvé dificilement bref je l est trouvé !!,Car pas question d utiliser un pont en H imaginez j’ai 8 moteur, 8x4transistor = 32 transistor !!
(vous on dit quoi?) il me reste la parti électronique j'ai cherché un L298, j l est trouvé dificilement bref je l est trouvé !!,Car pas question d utiliser un pont en H imaginez j’ai 8 moteur, 8x4transistor = 32 transistor !! 
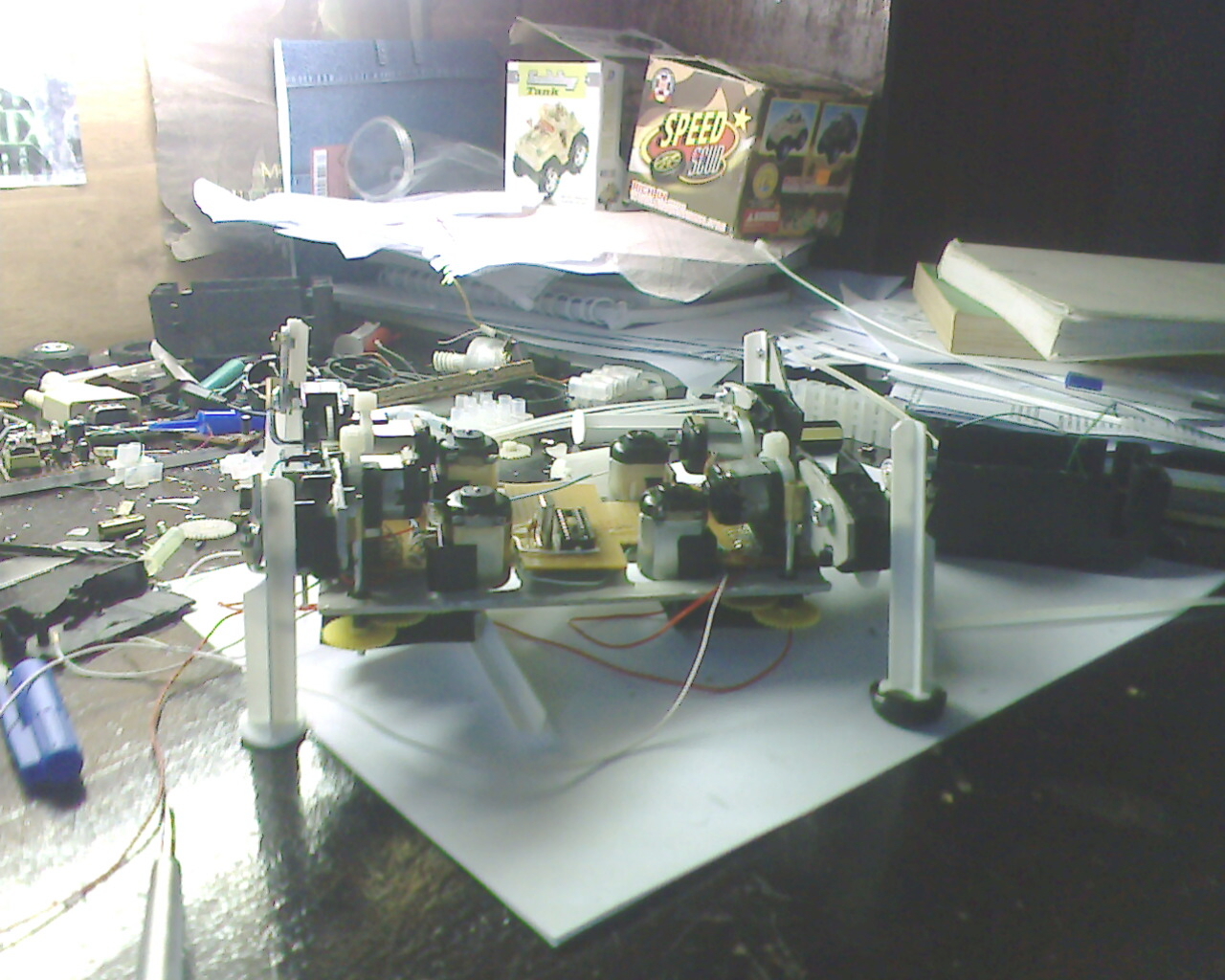
pour le châssis, j'ai pri " une nintendo " lol (j'esper qu'il y a pas de collectionneur ici)

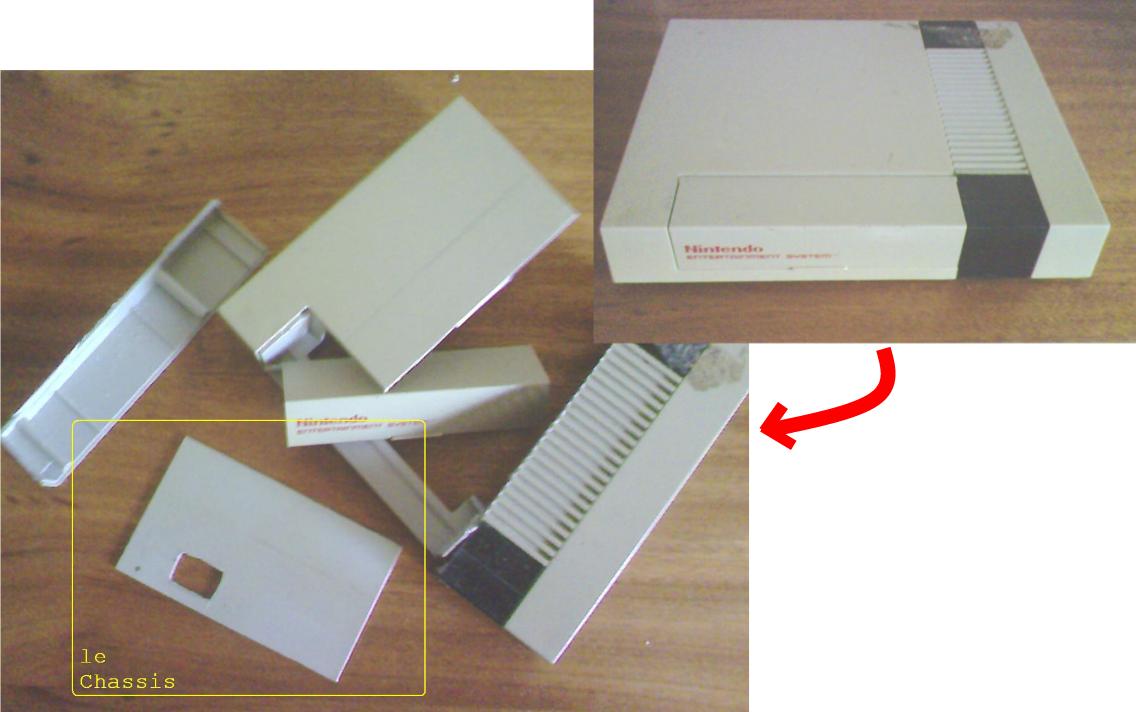
voila ou j en suis
patte robot
patte robot2
des commentairs ??!!

merci
a+