
En fait, si tu n'utilises pas la même batterie pour la partie commande (Raspberry Pi + xbee) et pour la partie accessoires et puissance (moteur, capteurs, etc...), tu peux faire en sorte que pendant la phase "sommeil", seule la partie commande reste en marche, et vu ce que consomme la Raspberry Pi, c'est un peux ce que je prévoyais sur le mien.
Tes panneaux solaires pourrait peut-être maintenir la charge de la batterie du Raspberry Pi, il resterait le problème de la charge de l'autre batterie.
Par contre, après lecture de ton dernier post et relecture du premier, je te conseille le WIFI. As-tu une box, à ta maison de campagne ?

30 réponses à ce sujet
#22

transistance
-

- Membres
-

- 411 messages
Membre passionné
Posté 02 décembre 2014 - 10:54
Je voudrais savoir s'il était possible, de pouvoir éteindre certaines parties du Rover sauf la carte principale bien sur , pour conserver l'autonomie du Rover dans ces phases d'inutilisation,...
Absolument! Sur mon robot d'exploration j'avais réalisé une carte d'alim avec des sorties commutables à la volée, ça me permettait de déconnecter des parties gourmandes en énergie et pas vitales au fonctionnement autonome du robot. Les microcontrôleurs sont aussi capables de se mettre en sommeil pour économiser de l'énergie... c'est toujours bon à savoir. Pour ce qui est des cartes plus orienté informatique comme raspberry pi je ne sais pas comment ça se passe de ce côté.
...et est-il possible de rajouter des informations sur la consommation de chaque partie du Rover ( que l'on verra depuis le contrôle à distance ) ?
Oui c'est possible mais la vrai question : est-ce réellement utile ? Sachant que ça va prendre du temps de communication (et de l'énergie en plus) pour transmettre toutes ces données qu'il faudra ensuite traitée séparément dans ton logiciel (une jauge par système risque d'être fouilli et dur à lire) il faut que ça vaille le coup. A toi de voir.
La solution intermédiaire pourrait concister à mettre un repère orthonormè avec une courbe qui représente la consommation totale par unité de temps. Ça permettrait de voir l'évolution de la consomation sans que ça soit too much.
N'oubliez jamais que "Ban Ki-moon n'attrape pas mousse"
#23
Conrad Allain
-
- Membres
- 26 messages
Membre
Posté 09 décembre 2014 - 03:57
Et comment je peux fabriquer une carte d'alim?
Que prendre d'autre qu'une Rasberry , car si cette carte consomme trop ,quelle carte serait la plus appropriée pour le rover .
Je veux utiliser des Xbees car , ça a une meilleure portée que la wifi , sachant que chez moi j'ai un modem routeur , mais les murs sont épais donc dès que l'on s'éloigne , on perd la connexion .
Ma priorité est que le tout consomme le moins possible ,pour permettre de le recharger plus vite !
#24
Kaquaoify
-

- Membres
-
- 99 messages
Membre occasionnel
- Gender:Male
- Location:Derrière mon pare-feu
Posté 10 décembre 2014 - 07:20
La rapsberry consomme peu. Bon comparé à une Arduino, c'est plus mais tu va pas ruiner ta recharge a cause de ça.
Tu as déjà des notions électroniques ?
La théorie, c'est quand ça marche pas, mais on sait pourquoi.
La pratique, c'est quand ça marche, mais on sait pourquoi.
Quand la pratique rejoint la théorie, ça marche pas et on sait pas pourquoi
#26
levend
-

- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 10 décembre 2014 - 02:40
Personnellement, je préfère le Raspberry PI, mais c'est une histoire de goût  .
.
Par contre, pour la communication, je vois ça comme ça :
1- iPhone (ou smart phone android, ou PC, ou autres) >> Internet >> modem-routeur >> Robot (WIFI)
2- iPhone (ou smart phone android, ou PC, ou autres) >> Internet >> modem-routeur >> élément à déterminer >> Robot (xbee)
La transmission vidéo n'est pas prise en compte (quoique pour la version WIFI, ça ne change rien).
Le fait que la portée de ton routeur est limité par les murs épais, tu mets une antenne à l'extérieur (ou même une meilleure antenne à l'intérieur), je pense que tu auras le même soucis avec le xbee (mais je n'en suis pas sûr).
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#27
Conrad Allain
-
- Membres
- 26 messages
Membre
Posté 14 décembre 2014 - 06:45
Alors, je vais utiliser la Wi-Fi car ça sera plus simple, du coup , je dispose déjà d'une raspberry Pi B, comment la programmer ? que faut-il que j'achète d'autres ?(antenne Wi-Fi puissante, ...).
Comment je fabrique la carte d'alimentation ? (Quel composant acheter, comment la programmer?)
Pour la caméra, je souhaite une caméra de bonne qualité , ou je peux trouver cela ? et quel system de retransmission vidéo dois-je choisir ?
Comment fabriquer le récepteur ?
Pour le reste je verrais un peu plus tard .
#28
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 14 décembre 2014 - 08:12
Il y a pas mal d'info sur les Raspberry Pi sur le net, tu devrais trouver facilement ce qu'il te faut pout l'alim.
Pour la vidéo, vu que tu optes pour le WIFI, il y a des caméra motorisée WIFI, donc aucun soucis pour l'émetteur ou le récepteur. Toutefois, je te conseille une caméra WIFI non motorisée, tu construiras ou achèteras un Pan&Tilt à base de servos, ça consommera moins que la caméra WIFI motorisée du commerce.
Après il y a aussi la solution de la caméra et de la Raspberry Pi reliés à un routeur WIFI embarquée, l'avantage, tu peux avoir des caméra de meilleure qualité pour le même prix que la WIFI ; l'inconvénient : un élément de plus à embarquer donc plus de consommation.
D'après ce que tu dis, je te conseille de mettre des antennes à l'extérieur : une ou deux selon la disposition de ta maison et du terrain pour éviter les zones sans WIFI.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#29
sky99
-

- Membres
-
- 271 messages
Habitué
- Gender:Male
Posté 15 décembre 2014 - 06:30
Bonjour,
j'ai plusieurs petits rovers basés sur du raspi, et je tiens à faire une petite remarque :
le raspi ne consomme pas trop, mais quand même,c'est non négligeable.
Le raspicam de plus rajoute 100 a 200mA de conso.
En pratique, la conso du raspi en veille dépend du modèle:
350mA pour un modèle B, 230 pour un modèle B+, 200 pour un modèle A, et 100 pour un A+.
Une clé wifi rajoute facilement 100-200mA de plus.
Donc à mon avis, il te faut un A+, ou au pire un B+ (le A et le B+ ont une conso très proche, donc
autant prendre le B+ pour avoir le port réseau, c'est moins chiant pour débugger).
En pratique, si on prend une batterie lipo ou liion de 6000mAh, en 1 cellule, ça fait du 3.7V*6=22WH,
le raspi en veille en A+ fera 5V*0.1A=0.5WH, soit en théorie 44h de fonctionement en veille.
Il faut bien enlever 10 à 20% pour le convertisseur de tension, soit disons 35h. avec le wifi on peut
facilement doubler ou tripler la conso, donc on peut vite tomber a 10-15h d'autonomie...
Ceci, pour une batterie qui pèse 150g environ.
En NiMH, il faut facilement 3 fois plus de masse de batterie pour avoir la même chose, et en technologie plomb,
significativement plus (jusqu'à x10).
Donc attention quand même à la conso du pi!
D'autre part le pi n'a pas de mode veille, contrairement au arduino, qui peut diviser sa conso de plusieurs
ordres de grandeur (la conso du pi en idle est à peu près le minimum, underclocker ne fait pas gagner grand chose).
Sur les batteries, oui, les batteries lithium peuvent exploser, etc. Mais dans un cadre d'utilisation NORMAL, c'est très improbable.
Il faut simplement un circuit de charge correct, qui protège de la trop grande décharge et de la surcharge. Pratiquement TOUS les circuits le font, donc
il suffit d'en prendre un d'une provenance normale pour être tranquille.
Le deuxieme point à surveiller, c'est le taux de charge.
Si la batterie donne comme dans mon exemple 6000 mAh, à moins qu'il en soit précisé autrement, il faut éviter de la charger avec plus de 6A.
En général, on recommande la moitié ou moins pour être tranquille, donc 3A ou moins.
Le point sympa avec le LIPO, c'est que les chargeurs sont peu chers, et du coup il est possible et facile d'en prendre un avec une entrée pour la recharge, et une sortie pour le circuit à alimenter. Si le paneau solaire fournit du courant, la batterie se rechargera. Sinon, rien. Dans tous les cas, le circuit continue à fonctionner pendant ce temps. Un peu comme avec les smarphones : si il est branché, on peut s'en servir, mais il se recharge, et si on le débranche, il continue à fonctionner sans interruption de service.
Adafruit fait par ex, un chargeur lipo pour paneau solaire, qu'il suffirait de brancher directement, sans bidouille. En plus, il prend le courant sur le paneau solaire si la batterie est chargée et que le paneau fournit assez de courant. Tout ça automatiquement.
->http://www.adafruit.com/product/390
par défaut 500mA en charge, jusqu'à 1A.
Les circuits équivalents en NiMh sont plus difficiles à trouver. En revanche en technologie plomb, c'est TRÈS simple, il suffit de charger jusqu'à une tension max définie (dans les 13-14V pour une batterie plomb de 12v), donc un pont diviseur suffit pour vérifier la tension, et un transistor pour autoriser le courant à passer ou non vers la batterie.
Dernier point : 6 moteurs, c'est chouette.
Seulement, il faut tout de suite penser à prendre des moteurs équipés d'un axe moteur ou l'on peut mettre un capteur de rotation. idéalement ce capteur
doit être placé sur l'axe moteur direct, et non pas en sortie de la boite de réduction -l'axe de la roue- pour une plus grande précision.
La raison est que les moteurs DC tournent à des vitesses différentes, même si on les alimente de la même façon. Pas beaucoup plus vite ou moins vite, mais il y a de petites variations entre deux moteurs. Du coup, pour chaque paire de moteur, on en aura un plus rapide que l'autre, du coup le robot tournera du coté du moteur le plus lent (très légerement)
Avec 6 roues, on réduira généralement le problème (il y a peu de chances que les 3 moteurs lents soient du même côté), mais ça entraînera tout de même un décalage sur la direction, et des pertes d'efficacité.
Du coup, il est souhaitable de synchroniser les moteurs. Quand on avance en ligne droite, on cherchera ainsi à avoir tous les moteurs tournant à la même vitesse.
Le capteur de vitesse de rotation du moteur permettra d'utiliser un signal PWM pour équilibrer les vitesses entre elles.
Je parle plus en détail de ce point sur ce sujet : http://www.robot-maker.com/forum/topic/9387-programme-rea-rover-dexploration-autonome/
Au passage, tu peux aussi regarder mes guides/tutos, il y en a au moins un qui indique comment faire un robot à partir d'un raspi. Il faudra mettre à l'échelle certaines choses, mais la partie commande sera la même.
Autre point, 6 moteurs, ça implique 3 contrôleurs de moteurs (ou alors un qui en contrôle 6, mais généralement, les contrôleurs en gèrent 1 ou 2).
Il faudra au moins 2GPIO par moteurs, plus 1GPIO pour le retour de la vitesse de rotation.
ça fait déja 18GPIO pour les 6 moteurs.
Ceci dit on peut réduire le nombre, en utilisant pour les moteurs du même côté les mêmes broches pour contrôler la direction (tous les moteurs de gauche sont contrôlés par 1 broche pour la direction - avant ou arrière - et 3 broches pour la vitesse de chaque moteur).
cela fait tout de même au moins 14 GPIO, dont au moins 6 doivent être en PWM.
Point à noter : le raspi n'est pas très bon pour la PWM. Il y a un seul canal hardware, et en software ce n'est pas très précis.
Donc le raspi est une très bonne solution pour ton robot, mais il aura besoin d'un microcontrôleur genre arduino pour gérer les moteurs.
Cette approche permet de simplifier le design de la partie raspi, puisque le arduino peut se charger de tout ce qui est synchronisation des moteurs, direction, vitesse, etc, et le raspi peut lui envoyer des ordres généraux du genre "avance à X% de ta vitesse", "tourne pendant Y ms", etc, sans avoir à dire "allume le moteur 1 en avant, à 98% de sa vitesse, .... moteur 6 en avant à 99% de sa vitesse".
Pour les capteurs, puisque tu prévois un gros robot, il ny a pas trop de raisons de se priver, je te conseillerais des capteurs pour détecter les obstacles devant (infrarouge ou ultrasons par ex), mais aussi pour détecter les trous devant le robot.
Un accéléromètre et un gyro peuvent être utiles pour que le robot puisse mesurer sa position (à plat, penché, en train de tomber, etc) et son déplacement (de combien a t'il tourné, est il en train d'avancer, reculer, etc), sans coûter bien cher.
Pour les paneaux solaires, il peut être sympa de rajouter un ou deux servomoteurs pour orienter le panneau face au soleil.
Avec deux ou quatre capteurs de lumière, on peut facilement faire un algorithme de suivi du soleil.
Selon la vitesse, le système pourrait être utilisé en déplacement (mais attention que le servo ne consomme pas plus de courant qu'il
ne permet d'en gagner), ou au repos pour maximiser l’efficacité du panneau.
Dernier point, si c'est un robot outdoor, il faut rapidement réfléchir à la protection de l'électronique, voire son isolation.
Il est impératif de protéger l'électronique de la pluie et des éclaboussures, mais on peut aussi vouloir protéger certaines
parties du soleil (par exemple la batterie). Pour l'eau, il faudra donc une coque fermée, voire des joints, pour la seconde partie, un peu de polystyrène peut suffire, ou un placement astucieux des composants.
Au passage, je réagis au post précédent :
la solution du module camera du raspi me parrait préférable à la caméra wifi motorisée, car la conso totale sera probablement plus faible pour le module caméra (le bidule wifi motorisé à lui aussi besoin de courant pour alimenter son wifi!), on contrôle mieux l'encombrement, la forme, et le placement des composants, et on peut prendre les composants qu'on veut pour l'orientation, donc des modèles qui consomment moins par exemple. D'autre part, les camera wifi motorisées sont souvent en 640*480 ou 800*600, avec une qualité d'image faible. Le module caméra du raspi est full HD a 30 images par seconde, et 5 mpixels en mode photo. Il passe par le GPU du raspi, donc consomme à peine 3% des ressources CPU pour une capture video full HD.
Le tout coûte en outre significativement moins cher, et le module caméra pèse à peine quelques grammes 
Bonne chance
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
#30
Conrad Allain
-
- Membres
- 26 messages
Membre
Posté 26 décembre 2014 - 01:14
Bonjour;
Merci pour cette réponse très intéressante, j'ai déjà une Raspi b et je viens de me procurer une raspicam, pour les batteries, je me suis procuré le chargeur Lipo de chez Adafruit, car je vais m'orienter vers du Lipo ou Lion car, si je prends des batteries au plomb, cela pèsera plus lourd donc implique une plus grande consommation, de plus gros moteurs...Mais que choisir comme "grosse batteries " lipo ou lion .
Pour le panneau solaire, il faut que je trouve un panneau solaire dans ce style-là ? http://www.adafruit.com/products/152
Pour l'antenne Wi-Fi, je ne sais pas que choisir, il y a beaucoup de produit, il me faudrait une grosse antenne, puissante, quelqu'un a-t-il une suggestion?
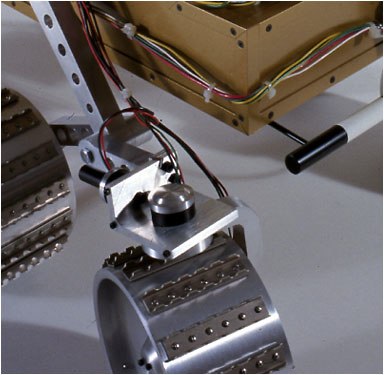
Pour les moteurs je voudrais le même système que sur Sojouner comme la photo ci-dessous, donc cela change le nombre de GPIO utilisé, quel genre de carte de chez Arduino dois-je prendre pour gérer les moteurs ?
Les moteurs sur sojourner étaient de chez Maxon DC motor http://www.maxonmotor.com/maxon/view/content/index
Quels moteurs achetés ?
Je trouve que de mettre des accéléromètres et une bonne idée, mais quel accéléromètre dois-je me procurer?
Pour ce qui concerne l'orientation du panneau solaire, je pense qu'il sera fixe ...
Ce qui concerne l'isolation, j'ai déjà plusieurs idées, mais le seul problème est la ventilation de l'intérieur (surtout en été), car tous ces composants chauffent donc ... Pour l'hiver ce n'est pas un souci .
Pour l'instant je me charge de trouver tous les composants et ensuite je passerais à la partie programmations, et enfin à la partie assemblage, c'est-à-dire d'installer le tout dans le "Rover" vide ...(dans la coque).
Image(s) jointe(s)
#31
sky99
-
- Membres
-
- 271 messages
Habitué
- Gender:Male
Posté 06 janvier 2015 - 06:26
Pour le choix de tes batteries, ça dépend de tes moteurs. Selon la tension nécéssaire pour les moteurs, il faudra prendre une lipo 3.7V, 7.4, etc..
Après, plus il y a de mAh ou d'Ah, plus la batterie stocke d'énergie, pour une masse plus importante (à tension égale, bien sur).
Pour les antennes Wifi, il faut savoir que plus une antenne à un gain élevé, plus elle est directionnelle. En effet, même les antennes omni sont touchées : si le gain est plus élevé, elle emet à 360°, certes, mais verticalement dans un angle moins grand. SI le robot est sur un terrain plutot plat, ça suffit cependant.
De toutes façons, le plus simple c'est de prendre une clé Wifi avec une ou deux antennes détachables, et d'essayer avec une/des antennes 3Dbi, 6Dbi, voire 9Dbi...
Pour le paneau solaire, je pense qu'il ne sert à rien de se précipiter si tu n'as pas fait ton budget énergétique.
Quelle sera la conso du robot immobile?
Quelle sera sa conso en mouvement?
Quelle sera sa conso MAX (moteurs en "stall")
Quelle serait sa conso en hibernation (tout éteint, y compris la majeure partie de l'électronique de contrôle, par ex en cas de batt faible, il se mettrait dans ce mode, coûpant le pi jusqu'à un niveau de charge suffisant)?
partant de là, il faut voir la quantité d'énergie théorique collectable par le panneau solaire. En pratique, sachant que je consomme X Watts, combien de watts peut fournir mon panneau?
Puis combien de watts puis-je espérer en moyenne dans la journée?
ça permet aussi de dimensionner les batteries, puisqu'il faut que le robot ait une autonomie pour les phases sans soleil.
Pour le/les accéléromètres, n'importe lequel, un qui mesure trois axes, et disons 2-3g de force par axe, ça parait bien.
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




