Bonjour à tous !
J'ouvre un sujet pour discuter de ce que je suis en train de faire. Un robot quadrupède le plus intelligent possible.
Il est loin d'être fini mais c'est très intéressant à construire.
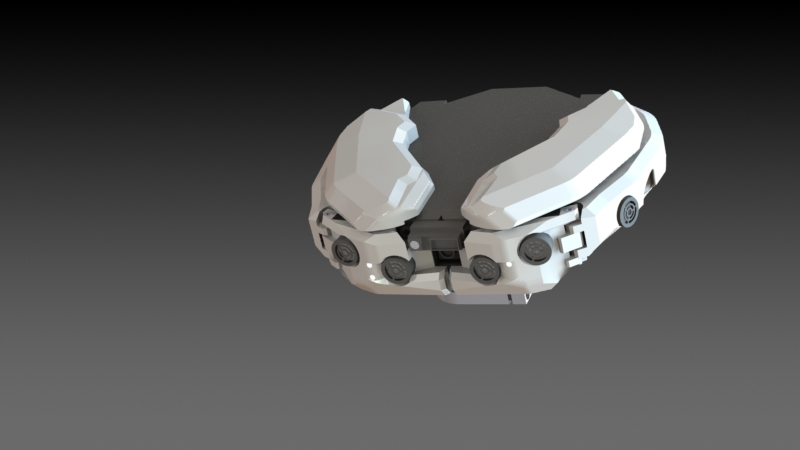
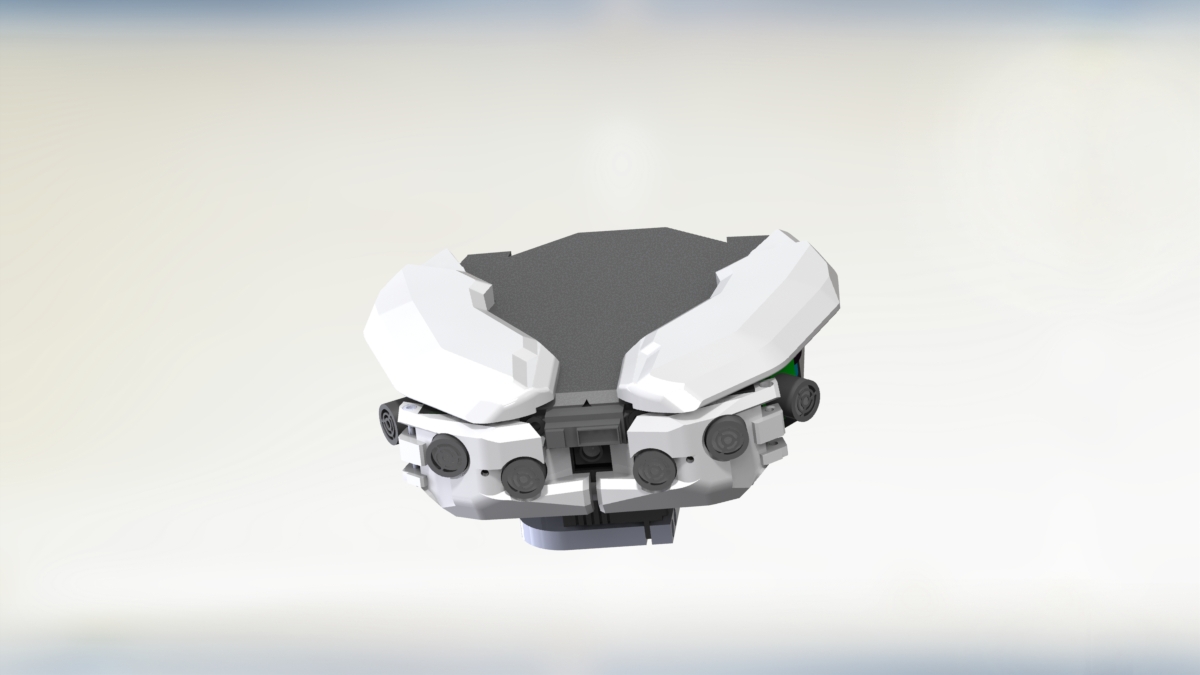
Pour l'instant, et surtout à cause du cout des moteurs, je me concentre sur la fabrication de la tête. Elle est composée de 4 capteurs de son, 5 capteurs à ultrason (2 à rayon large, 2 moyens, et un court) , un capteur ir (précis de 0 à 30 cm), et d'une caméra reliée à un ordinateur embarqué.
La vidéo est traitée par roborealm, un logiciel de vision pour machine où on peut combiner des filtres et programmer.
Tout ça est modélisé sur solidworks; voila où ça en est aujourd'hui: 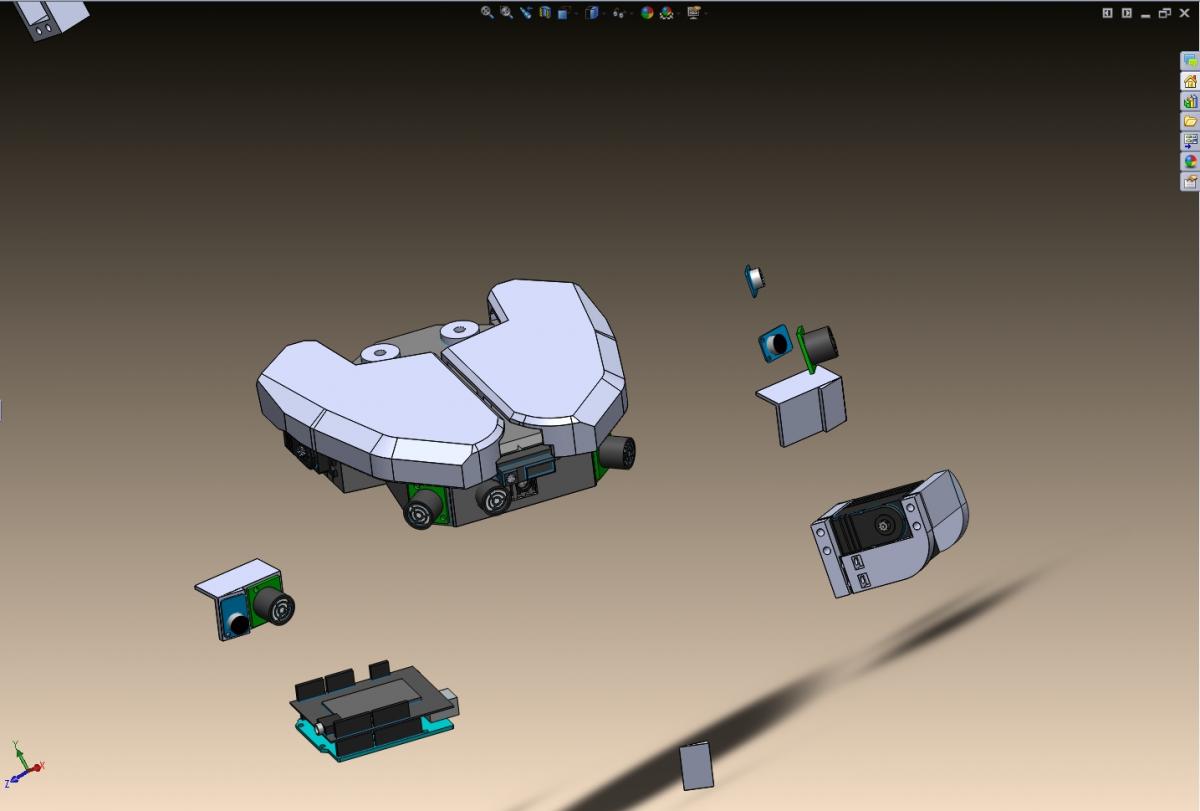
L'ensemble du robot sera sensible. Avec un système de ressorts et de rondelles il pourra capter les pressions et les contactes de toutes les directions : 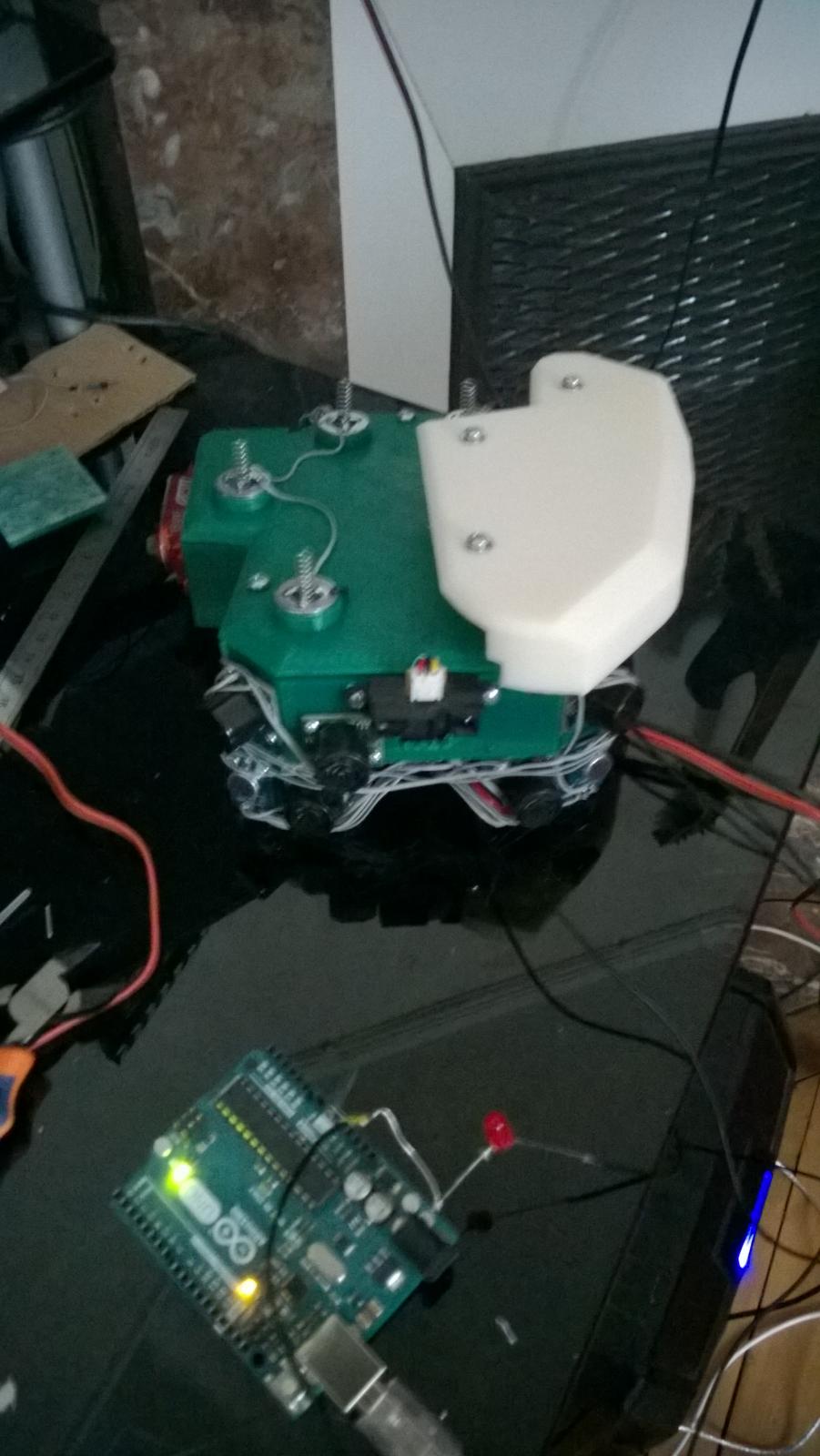
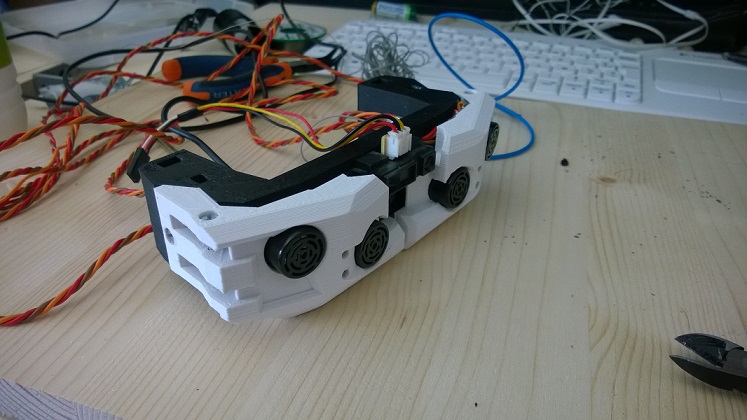
Un teste des capteurs sur la tête:
Et voici des testes avec roborealm :
le premier lien c'est un suivi d'objet rond et vert, le deuxième c'est un suivi de visage dans un environnement sombre. Ca fonctionne plutôt pas mal ! 
Il pourra détecter d'où vient le son, comprendre certains sons et en emmètre grâce aux 4 micros et au shield easyVR ( reconnaissance vocale ).
J'ai déjà fait un petit essai avec 2 micros et ça a l'air d'aller :
Sinon concernant le corps c'est pas pour demain puisqu'il y a déjà pas mal de chose à faire avec ça.
Les moteurs sont des servomoteurs (BMS 35A). Pour la tête il y en aura 7: 2 pour la mâchoire, et 5 pour l'articulation de la tête et le cou. Pour le corps j'avais prévu de les doubler pour chaque articulation, mais ça revient chère et j'en suis pas encore là. ^^
J'essai d'avancer au plus vite pour arriver à la programmation de l'ensemble de la tête, j'ai hate de voir si ça va envoyer l'paté ! 
J'espère que vous serai aussi emballé par le sujet que moi !








 , je suis pas très loin)
, je suis pas très loin)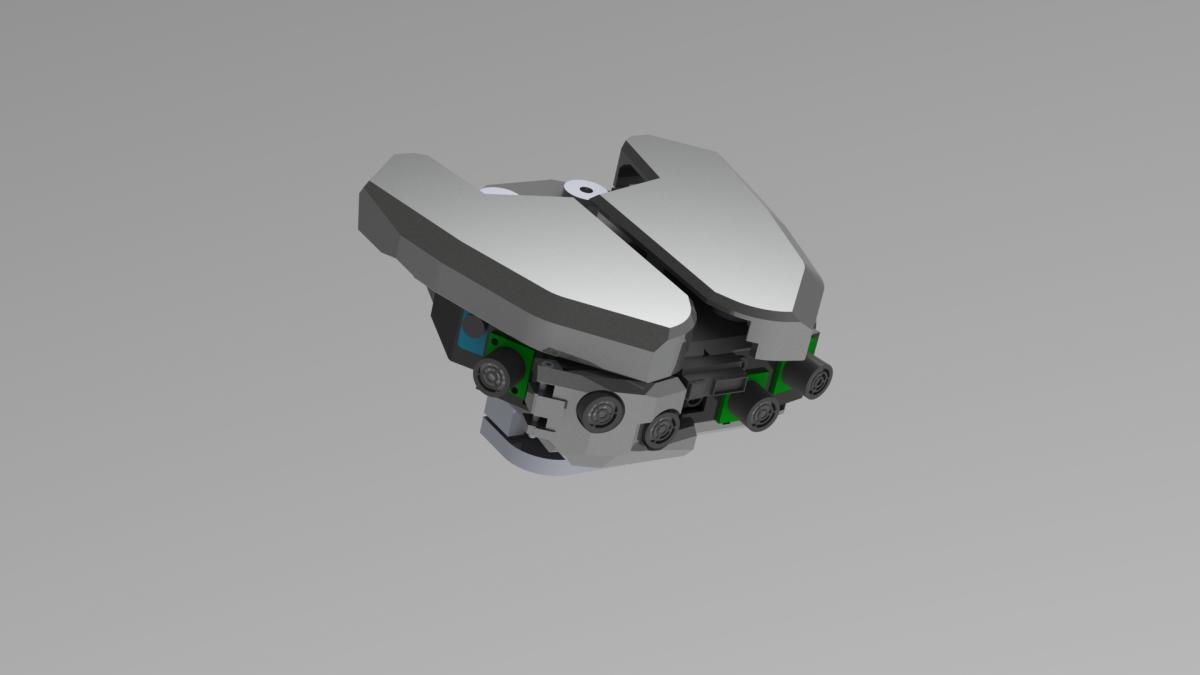

 je te donne une de mes voitures pour lui donner un style RobotFuturiste.
je te donne une de mes voitures pour lui donner un style RobotFuturiste.