Bonjour Transistance (un beau nom de composant bizarre çà  )
)
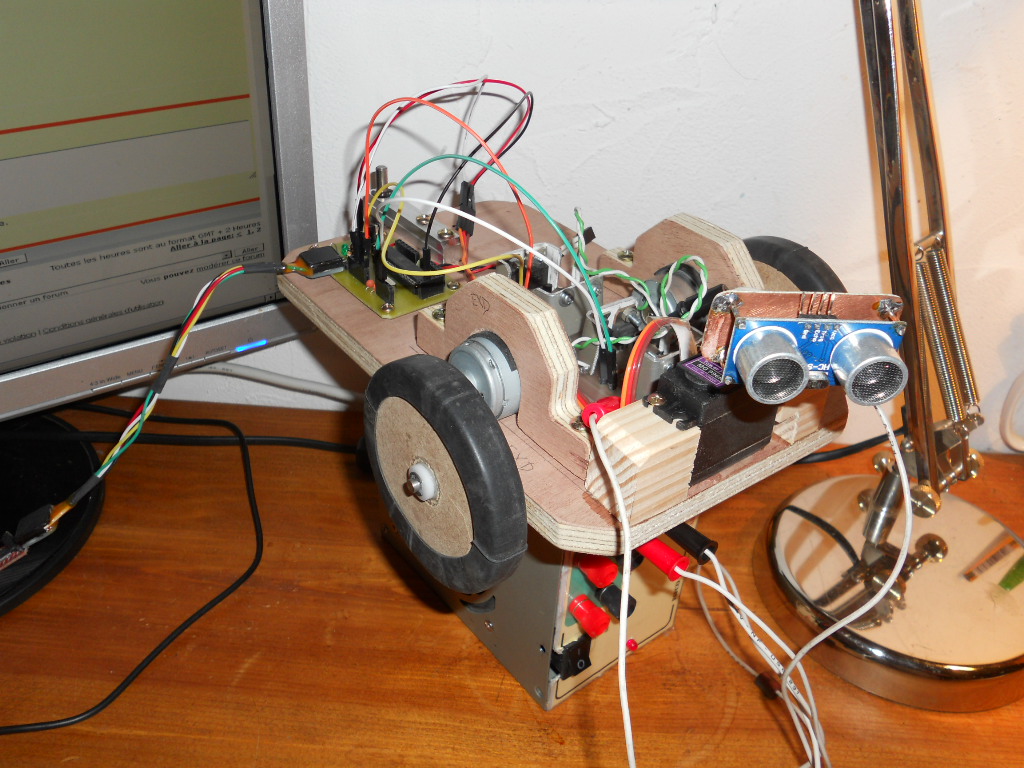
Vu le peu d’intérêt que semble susciter ce sujet j'avais arrêté de le nourrir. Oui, moi aussi je pense que construire un robot c'est autre chose que d'assembler des modules tout faits du commerce. Après chacun fait ce qu'il veut, moi c'est là que je trouve mon plaisir, mon truc c'est de faire des machins avec mes petits doigts, et même je dirais que j'ai changé mes roues pour celles de roller un peu à contrecœur, j'avais l'impression de tricher avec ma ligne de conduite. Mais bon... il est quand même plus beau comme çà  .
.
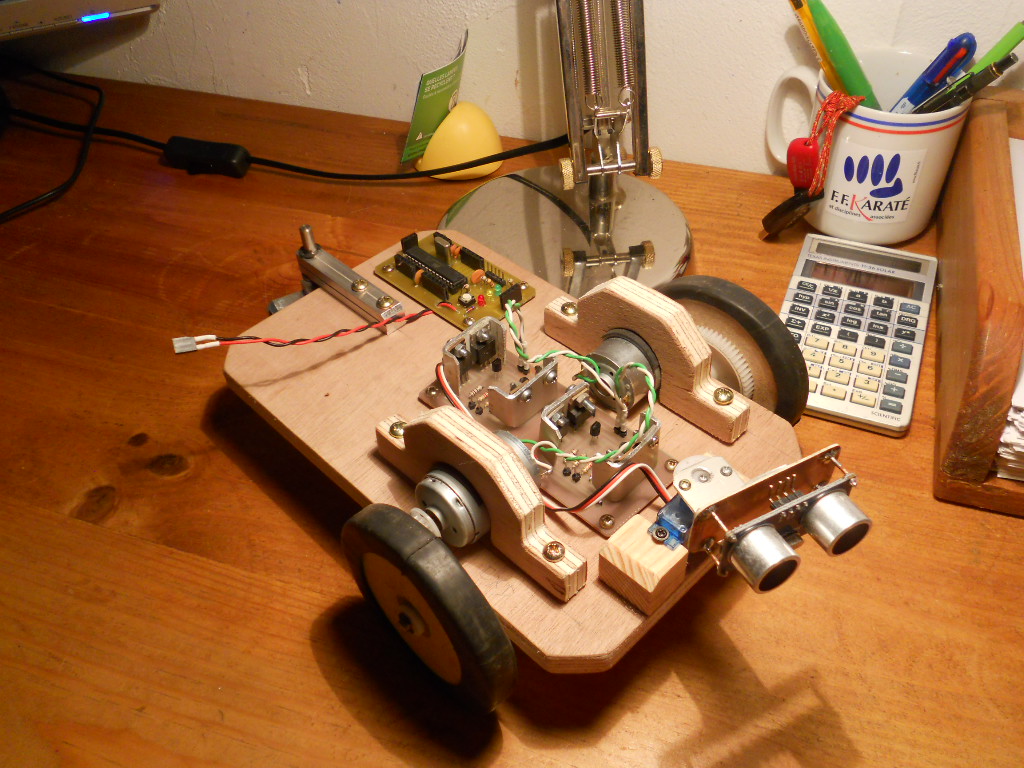
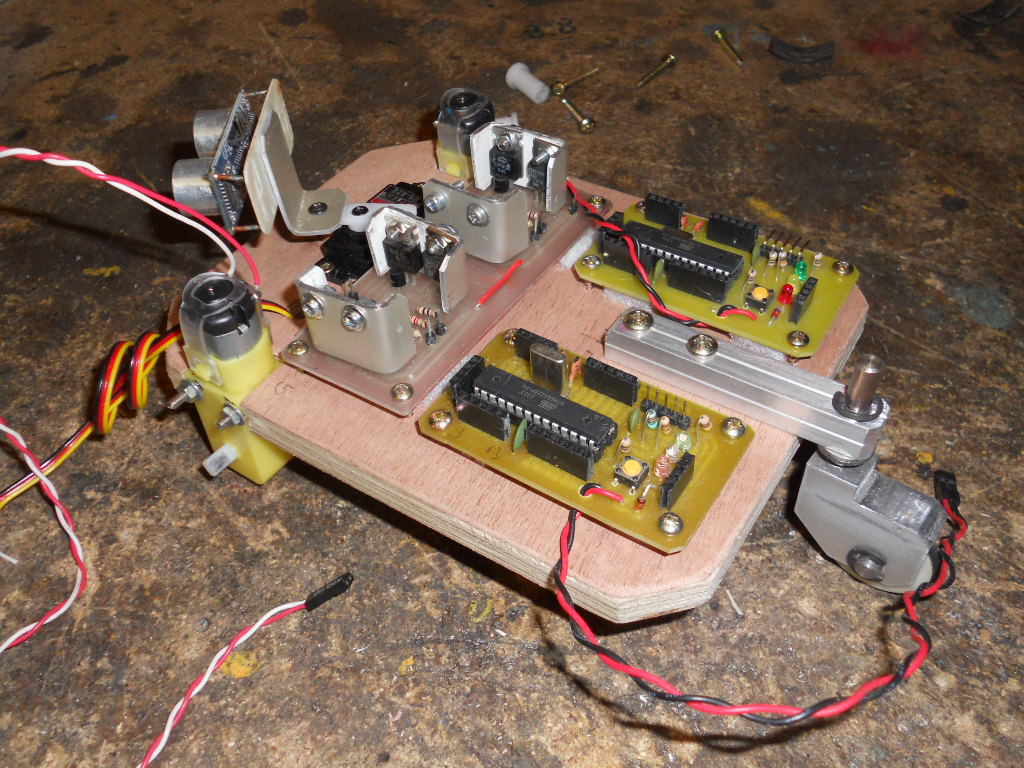
Ce n'est que mon deuxième robot et je suis en train d'apprendre plein de trucs en le bidouillant. Le premier était un bras entièrement maison.
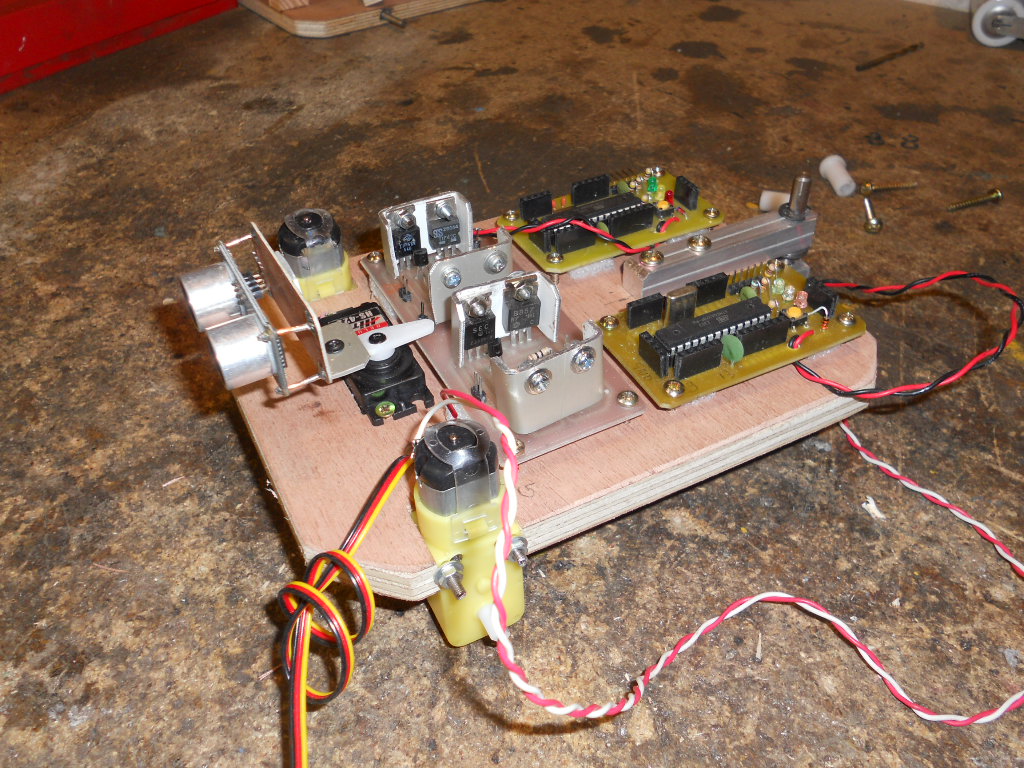
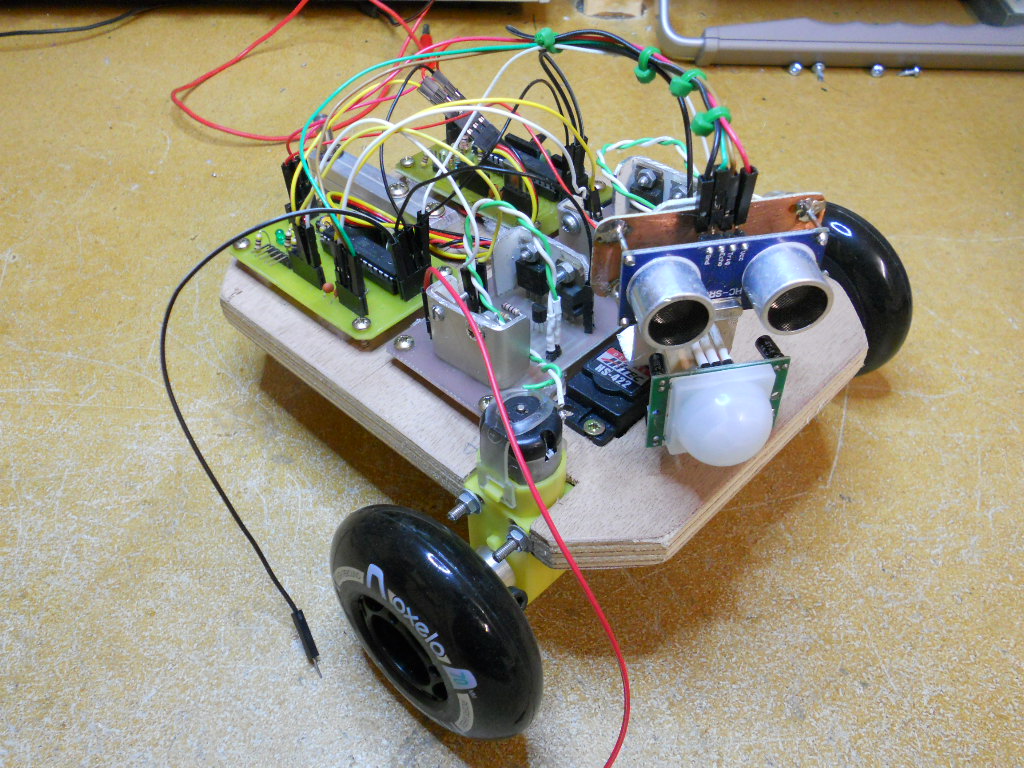
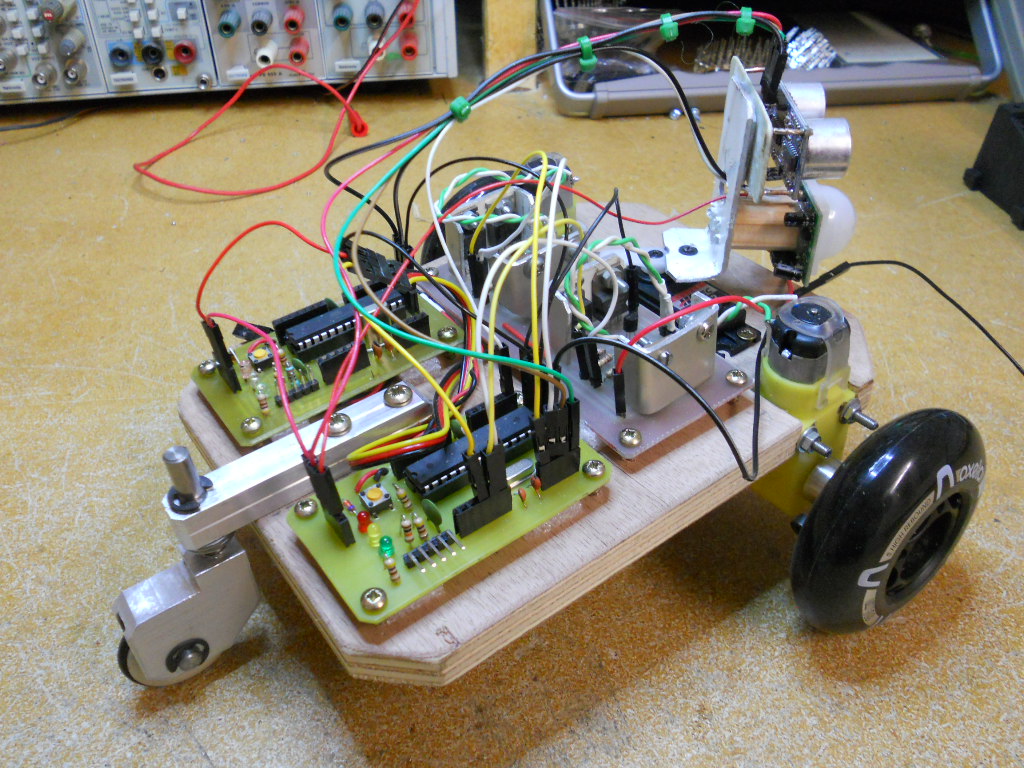
Les deux microcontrôleurs placés à l'arrière ne sont que deux arduinos maison. Un qui sert à la propulsion et la détection d'obstacle en temps réel, et la recherche de voie libre pour les manœuvres de sortie d'obstacle.
Au départ je voulais faire des déplacements entièrement en PWM maison (pas celui de l'arduino qui est bloquant), mais j'ai eu des soucis de souplesse de conduite, la détection d'obtacles prenait trop de temps machine et le robot avançait par a-coups. Donc finalement c'est ballade en full-speed et le PWM ne sert que pour les manoeuvres.
Le deuxième arduino ne sert pour l'instant que pour la gestion du module PIR, il sera relié au premier en tant qu'esclave par liaison I2C. Le but serait que dés que Gus détecte une présence vivante (chats, lapin nain ou moi...) il se dirige vers l'être vivant.
Ce qui fonctionne bien pour l'instant (à noter que c'est seulement sur banc, j'attends toujours ma batterie 5v de Chine pour le libérer):
- Gus se ballade, s'arrete quand il trouve un obstacle, marche arrière pendant 300ms, il explore l'environnement avec le module ultrason monté sur servo et détermine la voie libre à prendre, fait la manoeuvre voulue (à gauche ou à droite) pour aller reprendre sa ballade.
Ou j'en suis:
- Le module PIR étant monté sur le même servo que l'ultrason je cherche comment commander le servo par les deux arduinos alternativement, déjà testé quelques solutions avec des commutations par transistors qui ne fonctionnent qu'à moitié. Je cherche toujours.
- Détection d'être vivant: le PIR avait un angle trop large, je l'ai réduis avec un morceau de tube de sopalin pour qu'il me donne un azimut selon la position du servo, çà c'est bon, reste à faire le code pour choisir la trajectoire.
- Reste à relier les deux arduinos par I2C.