

Vous souhaitez fabriquer un robot? Vous souhaitez le faire bouger, que se soit ses roues, ses jambes, les pistes, ses bras, ses doigts, des tourelles de capteurs ? Vous allez sans doute avoir besoin de moteurs à un moment ou un autre !
Comment choisir un moteur pour votre robot?
Quels sont les avantages et inconvénients des moteurs couramment utilisés en robotique?
Nous tacherons de répondre à vos questions ici ! =)
Les moteurs électriques sont couramment utilisés pour actionner divers éléments dans vos robots : ses roues, les jambes, les pistes, les bras, les doigts, les tourelles de capteurs et bien d'autre choses encore ... Il y a des douzaines de types de moteurs (et beaucoup plus si vous comptez les moteurs à essence ou au gaz naturel),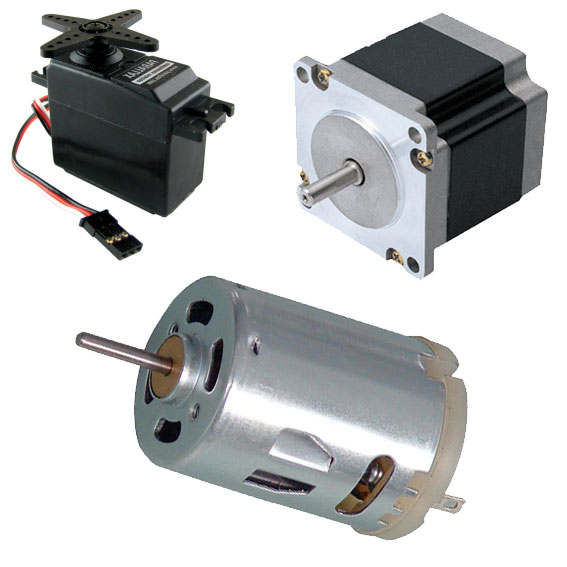
Mais pour la robotique amateur, le choix se résume essentiellement, à 3 types de moteurs .
Sans rentrer dans les spécificités physiques de ces moteurs, nous allons essayer de les présenter de manière pratique pour des utilisateurs débutant.
1) Le "Servomoteur"
C'est souvent l'un des premiers moteurs utilisé par les débutants car un servomoteur c'est un moteur assez facile à utiliser car il intègre pas mal de chose en mode tout en un. En effet on parlera d'un servomoteur, lorsque, indépendament du type de moteur utiliser dans le boitier que forme le servomoteur, on retrouve intègré dans un même boitier à la fois la mécanique (moteur et engrenage), et l’électronique, pour la commande et l'asservissement du moteur.
Asservissement ? Qu'est ce donc que cela ? Servo vient du latin servus qui a donné le mot français "serviteur" et qui à l'origine signifie esclave. Quand vous utilisez un servomoteur, vous êtes son maître et lui votre esclave, vous lui donnez une consigne et il fait ce qu'il faut pour respecter ce que vous lui demandez. C'est ce qu'on entends par " asservissement " : le moteur asservis, suit la consigne demandée. La seule contrainte c'est de " savoir envoyer la consigne " =). Pour cela le moteur a au moins 3 fils, deux servant à alimenter le moteurs , le 3 ème servant à communiquer la consigne.
L'exemple le plus classique est le servomoteur de modélisme.

Ce servo moteur est à l'origine utilisé dans dans le domaine du modélisme, dans les avions pour actionner les gouvernails par exemple ou pour gérer la direction des voitures ... Ce sont des moteurs à qui on donne généralement des consignes de position. Met toi à 90° met toi à 0°, met toi à 45°...
Exemple : Comment piloter un servomoteur test du servo moteur 9g.
Ces moteurs on généralement un débattement maximum de 180° et sont largement utilisé en robotique pour les bras robots, les humanoides etc ... Briel est un robot bipède piloté par 10 servomoteurs
Cependant il existe aussi des servomoteurs qui sont asservis en vitesse et non pas en position ( et on peut aussi modifier des servomoteurs asservis en positions pour en faire des servomoteurs asservis en vitesse ) ..
Il existe même des servomoteurs encore plus intelligent capable d'être asservis en vitesse ou en position, et de faire beaucoup d'autre choses encore ... Mesure de leur couple, de leur températures etc...
Vous avez encore des questions sur les servomoteurs? N'hésitez pas à les poser ici : Qu'est ce qu'un servomoteur ?
2) Le moteur DC continu
Si vous ne commencez pas par utiliser un servomoteur vous commencez sans doute par utiliser un moteur DC continu aussi appelé moteur CC (moteur à Courant Continu).
Contrairement au servomoteur, celui ci n'est pas asservis, du coup pas besoin de savoir lui envoyer une consigne spécifique, il n'a que deux fils et il suffit juste d'alimenter le moteur pour le faire tourner en continu, et inverser la polarité permet de faire changer le sens de rotation de ce moteur ! Ce type de moteur est souvent utiliser pour actionner les roues des robots.

Ces moteurs tournant généralement trop vite. ils sont généralement associés à des réducteurs, on parle alors de motoréducteurs, permettant de réduire la vitesse mais d'augmenter le couple du moteur. Il existe des moteurs à courant continu de différentes tailles et leur facilité d'utilisation fait qu'ils peuvent être utilisé dans de nombreux systèmes. Excepté si on souhaite utiliser le moteur soit éteint soit allumé à fond, on va généralement associé le moteur CC à un driver de moteur CC qui nous permettra de faire tourner un moteur plus ou moins vite. Et lorsque qu'on a envie de contrôler précisément la vitesse du moteur cc on va pouvoir ajouter des codeurs sur le moteurs, ou des potentiomètres quand on veut contrôler sa position... le premier permettant de connaitre la vitesse de rotation du moteur tandis que le second permet de connaître la position du moteur ... C'est d'ailleurs de cette façon que fonctionne un servomoteur, car en effet généralement le moteur à l'intérieur d'un servo est un moteur CC. Cependant la mise en oeuvre de l'asservissement bien que classique pour les amateurs, est généralement évitée pour les débutants.

exemple d'un moteur avec réducteur, encodeur, support moyeux et roue pour facilement assembler un robot.
3) Les moteurs pas à pas.
Quand on débute et qu'on commence à vouloir contrôler précisément un moteur, mais qu'on est pas encore nécessairement à l'aise avec la mise en place de l'asservissement d'un moteur cc on peut choisir le moteur pas à pas.
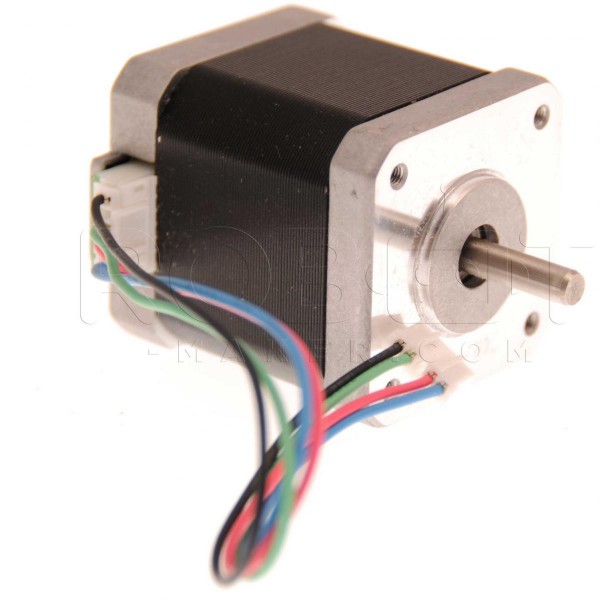
Un moteur pas à pas comme son nom l'indique va tourner petit pas par petit pas. Et on va pouvoir facilement contrôler avec précision le nombre de pas que va faire ce moteur.
Test d'un moteur pas à pas par ashira
Ces moteurs sont souvent utilisés dans des machines nécessitant de la précision : Imprimante 3D, Bras BNC Moveo par exemple, et parfois en propulsion pour entraîner des roues de robots . En effet contrairement au moteurs CC les moteurs pas à pas grâce à leur méthode de pilotage peuvent être piloté précisément et en boucle ouvert, facilement en initialisant leur position au départ et en comptant le nombre de pas effectués. Par contre dans ce cas le moteur pas à pas doit être correctement dimensionné car pour rester précis il ne doit pas " sauter de pas" ce qui arrive si on lui demande d'exercé un effort plus important que ce qu'il est capable de faire ... Alors Qu'un moteur CC asservis lui n'aura pas de problème de ce côté là mais sera plus compliqué à mettre en oeuvre.
Comme avec moteurs à courant continu DC, il existe des sous-types de moteurs pas à pas. Les steppers à aimants permanents sont ceux que vous risquez de rencontrer et ils sont également les plus faciles à utiliser.<br> - Un "sous-ensemble" spécial de moteurs continus est le servo-moteur, qui dans les cas typiques combine un moteur à courant continu avec une «boucle de rétroaction" pour assurer un positionnement précis. Il y a beaucoup, de types de servomoteurs ; une forme courante est le type utilisé dans les voitures et les avions radiocommandés de loisirs.<br>
Avec trois types de moteur courants pour les robots amateurs à choisir : DC, pas à pas et servo, il peut être difficile de savoir lequel est le meilleur. La réponse n'est pas simple, et n'est pas automatique, car chaque type de moteur possède ses propres avantages et inconvénients. et que pour une même applications plusieurs moteurs peuvent parfois convenir ...
Type de moteur / Avantages /Inconvénients
DC continu
Avantages :
Large choix disponible, neufs et d'occasion.
Facile à contrôler par ordinateur avec des relais ou des commutateurs électroniques.
Avec le réducteur adapté, les grands moteurs à courant continu peuvent alimenter un robot de 100 kilos sans coûter trop cher. .
Inconvénient :
Exige que la réduction de mécanisme fournisse des moments de torsion nécessaires pour la plupart des applications robotisées.
Le faible niveau de dimensionnement et de possibilités de montage.
Moteur pas à pas :
Avantages :
Ne nécessite pas de démultiplication de puissance à basse vitesse.
Faible coût lorsqu'ils sont achetés sur le marché de surplus.
Effet de freinage dynamique réalisé en laissant les bobines de moteur pas à pas sous tension (le moteur ne tourne pas, mais se verrouille en place).
Contrôle en boucle facilement en vitesse et en position
Inconvénient
Nécessite une commande pas à pas
Les mauvaises performances lors des changements de charges.
risque de perte de pas (Pas génial pour le déplacement des robots sur des surfaces inégales )
Consommation de courant élevée.
R/C servo
Avantages :
Peut être utilisé pour le contrôle précis de l'angle, ou pour une rotation continue
Disponible en plusieurs tailles standard, avec des trous de montage standard.
Des servos plus puissants sont disponibles,
Inconvénient
Le prix des servomoteurs puissant devient rapidement prohibitif
Exige un signal de commande spécial de conduite.<br> </p></td> </tr></table><p>* ce tableau se limite ici aux commandes radio (R / C) des servomoteurs; il existe d'autres types de servomoteurs
Gardez à l'esprit que tous les moteurs sont disponibles en différentes tailles. Les petits moteurs sont réalisés pour des applications où la compacité est estimée sur le moment de torsion. Bien qu'il existe de petits moteurs à couple élevé, ceux-ci tendent à être coûteux parce qu'ils utilisent des aimants rares, des roulements de haute efficacité, et d'autres caractéristiques qui ajoutent à leur coût.- Les gros moteurs peuvent produire plus de couple, mais exigent aussi des courants plus élevés. Les moteurs à courant élevés exigent des batteries de plus grande capacité et des circuits de commande plus importants qui ne seront pas surchauffés et ne risquent pas de griller sous la charge. Donc, faites correspondre la taille du moteur avec le reste du robot. Ne surchargez pas un petit robot avec un gros moteur lorsqu'une grande taille n'a pas d'importance. Quand vous vous êtes décidé sur la taille du moteur, comparez le couple disponible après une réduction de vitesse. La réduction de la vitesse augmente toujours le couple. L'augmentation de couple est proportionnelle à la quantité de réduction de roue : si la réduction est de 3: 1, le couple est augmenté d'environ trois fois (mais pas tout à fait, en raison des pertes par frottement).
De manière générale avant de choisir votre moteur définissez votre besoin, quel dimensions doit il avoir ? Que doit faire le moteur ? Quels est la vitesse attendue ? Quels sont les efforts qui seront à transmettre ? Quels sont vos connaissances sur le sujet ? Quels type de moteurs utilisent les projets qui se rapprochent du votre ? En bref essayez de choisir le moteur le plus adapté en fonction de tout ce qu'on a dit au dessus et hésitez pas à vous inspirez des projets que vous pourrez trouver à droite ou à gauche ! =)
Quelques liens du forum qui parlent de moteurs :
http://www.robot-mak...oteur-puissant/
http://www.robot-mak...pour-chenilles/
http://www.robot-mak...teur-pas-a-pas/
http://www.robot-mak...ommande-moteur/
http://www.robot-mak...4-arret-moteur/
http://www.robot-mak...ible-puissance/
http://www.robot-mak...mal-a-demarrer/
http://www.robot-mak...-axe-de-moteur/
Comment choisir un moteur pour votre robot?
Quels sont les avantages et inconvénients des moteurs couramment utilisés en robotique?
Nous tacherons de répondre à vos questions ici ! =)
Les moteurs électriques sont couramment utilisés pour actionner divers éléments dans vos robots : ses roues, les jambes, les pistes, les bras, les doigts, les tourelles de capteurs et bien d'autre choses encore ... Il y a des douzaines de types de moteurs (et beaucoup plus si vous comptez les moteurs à essence ou au gaz naturel),
Mais pour la robotique amateur, le choix se résume essentiellement, à 3 types de moteurs .
Sans rentrer dans les spécificités physiques de ces moteurs, nous allons essayer de les présenter de manière pratique pour des utilisateurs débutant.
1) Le "Servomoteur"
C'est souvent l'un des premiers moteurs utilisé par les débutants car un servomoteur c'est un moteur assez facile à utiliser car il intègre pas mal de chose en mode tout en un. En effet on parlera d'un servomoteur, lorsque, indépendament du type de moteur utiliser dans le boitier que forme le servomoteur, on retrouve intègré dans un même boitier à la fois la mécanique (moteur et engrenage), et l’électronique, pour la commande et l'asservissement du moteur.
Asservissement ? Qu'est ce donc que cela ? Servo vient du latin servus qui a donné le mot français "serviteur" et qui à l'origine signifie esclave. Quand vous utilisez un servomoteur, vous êtes son maître et lui votre esclave, vous lui donnez une consigne et il fait ce qu'il faut pour respecter ce que vous lui demandez. C'est ce qu'on entends par " asservissement " : le moteur asservis, suit la consigne demandée. La seule contrainte c'est de " savoir envoyer la consigne " =). Pour cela le moteur a au moins 3 fils, deux servant à alimenter le moteurs , le 3 ème servant à communiquer la consigne.
L'exemple le plus classique est le servomoteur de modélisme.
Ce servo moteur est à l'origine utilisé dans dans le domaine du modélisme, dans les avions pour actionner les gouvernails par exemple ou pour gérer la direction des voitures ... Ce sont des moteurs à qui on donne généralement des consignes de position. Met toi à 90° met toi à 0°, met toi à 45°...
Exemple : Comment piloter un servomoteur test du servo moteur 9g.
Ces moteurs on généralement un débattement maximum de 180° et sont largement utilisé en robotique pour les bras robots, les humanoides etc ... Briel est un robot bipède piloté par 10 servomoteurs
Cependant il existe aussi des servomoteurs qui sont asservis en vitesse et non pas en position ( et on peut aussi modifier des servomoteurs asservis en positions pour en faire des servomoteurs asservis en vitesse ) ..
Il existe même des servomoteurs encore plus intelligent capable d'être asservis en vitesse ou en position, et de faire beaucoup d'autre choses encore ... Mesure de leur couple, de leur températures etc...
Vous avez encore des questions sur les servomoteurs? N'hésitez pas à les poser ici : Qu'est ce qu'un servomoteur ?
2) Le moteur DC continu
Si vous ne commencez pas par utiliser un servomoteur vous commencez sans doute par utiliser un moteur DC continu aussi appelé moteur CC (moteur à Courant Continu).
Contrairement au servomoteur, celui ci n'est pas asservis, du coup pas besoin de savoir lui envoyer une consigne spécifique, il n'a que deux fils et il suffit juste d'alimenter le moteur pour le faire tourner en continu, et inverser la polarité permet de faire changer le sens de rotation de ce moteur ! Ce type de moteur est souvent utiliser pour actionner les roues des robots.
Ces moteurs tournant généralement trop vite. ils sont généralement associés à des réducteurs, on parle alors de motoréducteurs, permettant de réduire la vitesse mais d'augmenter le couple du moteur. Il existe des moteurs à courant continu de différentes tailles et leur facilité d'utilisation fait qu'ils peuvent être utilisé dans de nombreux systèmes. Excepté si on souhaite utiliser le moteur soit éteint soit allumé à fond, on va généralement associé le moteur CC à un driver de moteur CC qui nous permettra de faire tourner un moteur plus ou moins vite. Et lorsque qu'on a envie de contrôler précisément la vitesse du moteur cc on va pouvoir ajouter des codeurs sur le moteurs, ou des potentiomètres quand on veut contrôler sa position... le premier permettant de connaitre la vitesse de rotation du moteur tandis que le second permet de connaître la position du moteur ... C'est d'ailleurs de cette façon que fonctionne un servomoteur, car en effet généralement le moteur à l'intérieur d'un servo est un moteur CC. Cependant la mise en oeuvre de l'asservissement bien que classique pour les amateurs, est généralement évitée pour les débutants.
exemple d'un moteur avec réducteur, encodeur, support moyeux et roue pour facilement assembler un robot.
3) Les moteurs pas à pas.
Quand on débute et qu'on commence à vouloir contrôler précisément un moteur, mais qu'on est pas encore nécessairement à l'aise avec la mise en place de l'asservissement d'un moteur cc on peut choisir le moteur pas à pas.
Un moteur pas à pas comme son nom l'indique va tourner petit pas par petit pas. Et on va pouvoir facilement contrôler avec précision le nombre de pas que va faire ce moteur.
Test d'un moteur pas à pas par ashira
Ces moteurs sont souvent utilisés dans des machines nécessitant de la précision : Imprimante 3D, Bras BNC Moveo par exemple, et parfois en propulsion pour entraîner des roues de robots . En effet contrairement au moteurs CC les moteurs pas à pas grâce à leur méthode de pilotage peuvent être piloté précisément et en boucle ouvert, facilement en initialisant leur position au départ et en comptant le nombre de pas effectués. Par contre dans ce cas le moteur pas à pas doit être correctement dimensionné car pour rester précis il ne doit pas " sauter de pas" ce qui arrive si on lui demande d'exercé un effort plus important que ce qu'il est capable de faire ... Alors Qu'un moteur CC asservis lui n'aura pas de problème de ce côté là mais sera plus compliqué à mettre en oeuvre.
Comme avec moteurs à courant continu DC, il existe des sous-types de moteurs pas à pas. Les steppers à aimants permanents sont ceux que vous risquez de rencontrer et ils sont également les plus faciles à utiliser.<br> - Un "sous-ensemble" spécial de moteurs continus est le servo-moteur, qui dans les cas typiques combine un moteur à courant continu avec une «boucle de rétroaction" pour assurer un positionnement précis. Il y a beaucoup, de types de servomoteurs ; une forme courante est le type utilisé dans les voitures et les avions radiocommandés de loisirs.<br>
Avec trois types de moteur courants pour les robots amateurs à choisir : DC, pas à pas et servo, il peut être difficile de savoir lequel est le meilleur. La réponse n'est pas simple, et n'est pas automatique, car chaque type de moteur possède ses propres avantages et inconvénients. et que pour une même applications plusieurs moteurs peuvent parfois convenir ...
Type de moteur / Avantages /Inconvénients
DC continu
Avantages :
Large choix disponible, neufs et d'occasion.
Facile à contrôler par ordinateur avec des relais ou des commutateurs électroniques.
Avec le réducteur adapté, les grands moteurs à courant continu peuvent alimenter un robot de 100 kilos sans coûter trop cher. .
Inconvénient :
Exige que la réduction de mécanisme fournisse des moments de torsion nécessaires pour la plupart des applications robotisées.
Le faible niveau de dimensionnement et de possibilités de montage.
Moteur pas à pas :
Avantages :
Ne nécessite pas de démultiplication de puissance à basse vitesse.
Faible coût lorsqu'ils sont achetés sur le marché de surplus.
Effet de freinage dynamique réalisé en laissant les bobines de moteur pas à pas sous tension (le moteur ne tourne pas, mais se verrouille en place).
Contrôle en boucle facilement en vitesse et en position
Inconvénient
Nécessite une commande pas à pas
Les mauvaises performances lors des changements de charges.
risque de perte de pas (Pas génial pour le déplacement des robots sur des surfaces inégales )
Consommation de courant élevée.
R/C servo
Avantages :
Peut être utilisé pour le contrôle précis de l'angle, ou pour une rotation continue
Disponible en plusieurs tailles standard, avec des trous de montage standard.
Des servos plus puissants sont disponibles,
Inconvénient
Le prix des servomoteurs puissant devient rapidement prohibitif
Exige un signal de commande spécial de conduite.<br> </p></td> </tr></table><p>* ce tableau se limite ici aux commandes radio (R / C) des servomoteurs; il existe d'autres types de servomoteurs
Gardez à l'esprit que tous les moteurs sont disponibles en différentes tailles. Les petits moteurs sont réalisés pour des applications où la compacité est estimée sur le moment de torsion. Bien qu'il existe de petits moteurs à couple élevé, ceux-ci tendent à être coûteux parce qu'ils utilisent des aimants rares, des roulements de haute efficacité, et d'autres caractéristiques qui ajoutent à leur coût.- Les gros moteurs peuvent produire plus de couple, mais exigent aussi des courants plus élevés. Les moteurs à courant élevés exigent des batteries de plus grande capacité et des circuits de commande plus importants qui ne seront pas surchauffés et ne risquent pas de griller sous la charge. Donc, faites correspondre la taille du moteur avec le reste du robot. Ne surchargez pas un petit robot avec un gros moteur lorsqu'une grande taille n'a pas d'importance. Quand vous vous êtes décidé sur la taille du moteur, comparez le couple disponible après une réduction de vitesse. La réduction de la vitesse augmente toujours le couple. L'augmentation de couple est proportionnelle à la quantité de réduction de roue : si la réduction est de 3: 1, le couple est augmenté d'environ trois fois (mais pas tout à fait, en raison des pertes par frottement).
De manière générale avant de choisir votre moteur définissez votre besoin, quel dimensions doit il avoir ? Que doit faire le moteur ? Quels est la vitesse attendue ? Quels sont les efforts qui seront à transmettre ? Quels sont vos connaissances sur le sujet ? Quels type de moteurs utilisent les projets qui se rapprochent du votre ? En bref essayez de choisir le moteur le plus adapté en fonction de tout ce qu'on a dit au dessus et hésitez pas à vous inspirez des projets que vous pourrez trouver à droite ou à gauche ! =)
Quelques liens du forum qui parlent de moteurs :
http://www.robot-mak...oteur-puissant/
http://www.robot-mak...pour-chenilles/
http://www.robot-mak...teur-pas-a-pas/
http://www.robot-mak...ommande-moteur/
http://www.robot-mak...4-arret-moteur/
http://www.robot-mak...ible-puissance/
http://www.robot-mak...mal-a-demarrer/
http://www.robot-mak...-axe-de-moteur/












