
 Mon contenu
Mon contenu Homme
Homme






Un nouveau sujet en perspective ! Super ! =)

https://www.robot-ma...e-programmable/
- Mike118 aime ceci
 Posté par
- 02 septembre 2022 - 06:37
Posté par
- 02 septembre 2022 - 06:37
Un nouveau sujet en perspective ! Super ! =)
https://www.robot-ma...e-programmable/
Posté par
- 02 septembre 2022 - 06:35
Je commence un nouveau projet. Il s'agit d'un drone programmable.
Ce drone sera basé sur une technologie éprouvée Ardupilot / Pixhawk.
A la différence d'un drone classique dirigé à l'aide d'une radiocommande, le drone programmable (drone robot) est capable d'interagir tout seul en fonction d'un programme écrit par le concepteur.
La plupart du temps, et pour commencer, cela consiste à définir un parcours tridimensionnel que le drone devra exécuter.
Quelques liens :
Si vous voulez en savoir plus, voici un tutorial très intéressant :
https://www.youtube....roE29SbVwhYrOtL
Voici mon drone en cours de montage. Il s'agit d'un kit F450.
Cliquez moi.

Posté par
- 01 septembre 2022 - 08:28
Mais si j'ai bon souvenir tu vas t'y remettre également bientôt
J'ai reçu tout le matériel, différents drivers, batterie, fusibles, moteurs.
Pour mon anniv, le Père Noël m'a même apporté un super oscilloscope 100Mhz, 4 voies, pour suivre les impulsions des moteurs Brushless.
Je n'ai plus qu'à m'y mettre.
J'ai terminé mon quadrupède pour la Tiny TRR. De ce coté, tout est OK.
Le problème, c'est que je me suis lancé sur un autre projet, ou plutôt une autre techno, le drone programmable. Je suis vraiment accroché.
Oui, c'est vrai, je ne suis pas sérieux, mais c'est comme ça que je fonctionne, par impulsion.
Là, c'est la rentrée et je suis au pied du mur. Alors, je me dis que je vais travailler sur les 2 projets en alternance, un jour sur deux, ou une semaine sur deux.
Je sais que ça ne fonctionne pas ce genre de truc, mais je vais essayer de me faire violence.
Je suis rentré, hier. Je commence lundi.
Posté par
- 30 août 2022 - 06:51
l'axe des moteurs est assez long et qu'il est en plastique.
C'est vraiment surprenant !
Pourquoi n'achètes tu pas des roues dentées prévues pour ce type de courroie. Tu t'embêterais peut-être moins.
https://fr.aliexpres...29610084883!rec
Posté par
- 19 août 2022 - 01:29
Voici la vidéo du deuxième test que j'ai fait à 21h pour éviter l'éblouissement du soleil.
Les nouveautés sont le long cou et les chaussons.
Vous remarquerez qu'il évolue très bien dans le sens des aiguilles d'une montre. C'est le sens choisi, à la TRR.
Posté par
- 17 août 2022 - 09:51
Cliquez moi.
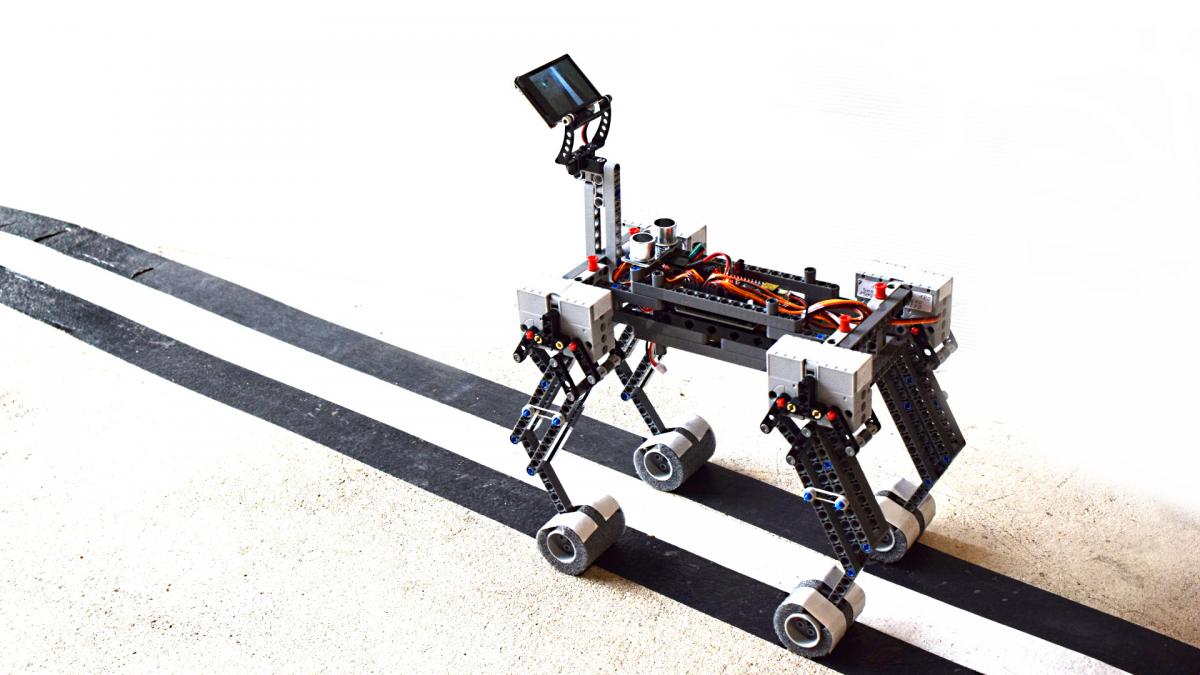
Voici une nouvelle version avec des pantoufles et un émetteur/récepteur US orienté vers le haut pour détecter le portique.
J'ai relevé l'Huskylens pour une meilleure détection.
J'ai également repris la piste de la TRR avec sa bande blanche encadrée par deux bandes noires.
Bon, c'est clair que cela ressemble plus à un lama qu'à un chien ou chat.
Reste plus qu'à faire la vidéo.
Posté par
- 17 août 2022 - 06:50
Je n'ai pas trouvé la KERISE V5, mais voici la V4. Cela donne une bonne idée de la miniaturisation.
Posté par
- 13 août 2022 - 02:22
Je trouve ce sujet très intéressant. J'ai un peu cherché pour les moteurs. Il y en a plein, en voici un exemple avec réducteur de vitesse.
Sur la même page, vers le bas, vous devriez avoir plein de pub vers d'autres moteurs.
https://www.ebay.com...CLK|clp:2563228
Reste le plus important, l'électronique. Si on se limite à quelque chose d'accessible, alors, il y a peut-être une solution, le Seeeduino XIAO qui mesure 20mm x 17.5mm x 3.5mm.
Je ne sais pas s'il est nécessaire d'avoir un circuit de puissance pour les moteurs. Avec un peu de chance . . .
Voici une vidéo sur cette carte:
Posté par
- 12 août 2022 - 09:33
Sinon je me demande bien avec quoi c'est propulsé, et quelle électronique est embarquée
Peut-être des micros moteurs. Il y a vraiment des micros moteurs dans les micro servos pesant 3,7g. https://fr.aliexpres...id=n3OEkb6xO13V
Pour l'électronique, ça doit être balaise.
Posté par
- 12 août 2022 - 08:45
J'ai tout d’abord été impressionné par la petite taille de la souris (échelle 1:1)
Si je comprends bien le titre, c'est plutôt 1:2
Oui, j'ai regardé pas mal de vidéos sur les suiveurs de ligne et les labyrinthes, c'est très impressionnant.
Mais, là, en plus, il y a effectivement la taille de la souris.
Posté par
- 09 août 2022 - 05:35
J'ai décidé de faire un quadrupède 8 DOF(Degrees Of Freedom) avec des GeekServos pour sa simplicité et ainsi me focaliser sur le problème du "Suiveur de ligne" avec un Huskylens.
Sur ma terrasse, le carrelage est en opus romains, et donc les lignes ne sont pas alignées. Cela crée une grande confusion pour l'Huskylens. De plus, la lumière extérieur est beaucoup trop importante.
Dans mon séjour, le carrelage est aligné, la lumière est bonne, mais mon épouse n'aurait pas apprécié que je colle du gros scotch au sol . . . Elle est comme ça ! Dommage. 
Restait le garage, mais à condition que je ferme les portails. Bonne pioche, cela a l'air de fonctionner.
Pas facile, le code ! J'ai eu quelques difficultés avant de me rendre compte que l'Huskylens buggait quelque peu.
Mais bon, je pense que pour un premier jet, ce n'est pas si mal.
J'espère améliorer la vitesse et la perception de la ligne. En principe, donc, d'autres tests sont à venir.
Posté par
- 25 juillet 2022 - 02:39
Et voici, la vidéo !
J'ai pensé qu'il était préférable de proposer d'abord le quadrupède dans sa version normale qui fonctionne, puis dans un deuxième temps, la version avec l'Huskylens quand elle fonctionnera.
Vous noterez que j'ai modifié la structure générale. Aujourd'hui, les pattes font plus référence à l'implantation d'un cheval qu'à celle d'un chat ou d'un chien.
J'ai constaté que la symétrie des pattes favorisait la stabilité.
Je vais bientôt commencer une nouvelle série de tests de vitesse, puis de suivi de ligne avec l'Huskylens.
Posté par
- 11 juillet 2022 - 11:30
Cliquez moi.

Voici mon dernier né. Il s'agit d'un robot roulant, ou UGV ( Unmanned Ground Vehicle ).
L'idée, c'était de faire un robot roulant de bonne taille, et très facile à faire, en moins d'une heure.
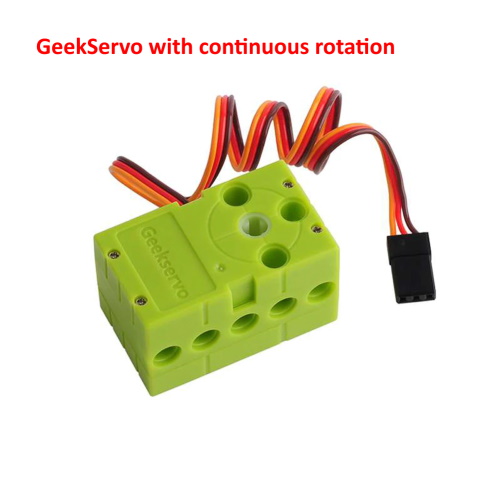
Cela a été rendu possible, grâce aux GeekServo verts à rotation continue que l'on peut voir sur l'image.
Comme à mon habitude, un Arduino Nano est enfiché sur le NANO Shield de Keyestudio.
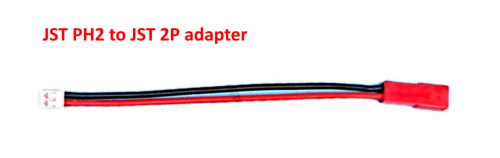
Ce Shield est très pratique car il possède un interrupteur. Le seul problème est le petit connecteur d'alimentation JST PH2, alors que les petites batteries sont souvent munis d'un connecteur JST 2P, basique. Mais j'ai trouvé un adaptateur.
Ce robot ne montera pas des escaliers et il n'est pas tout terrain. Sa vocation est de rouler sur une surface lisse, quoique ses grandes roues lui permettent de franchir un obstacle carré de 4cm, ce qui est déjà pas si mal.
Tout cela fait de ce robot une excellente base pour tout débutant désireux de se lancer dans la robotique. Pour commencer, on peut , par exemple, y ajouter un détecteur d'obstacle à ultrasons ou à infrarouge, ou une caméra Huskylens pour faire un suiveur de ligne, voir un GPS pour se repérer sur une surface.
Si j'avais une application à faire, ce serait un suiveur de mur, comme le projet de Dakota99. Mais ici, pas de problèmes mécaniques ! Il suffirait de monter un capteur à ultrasons (ou autre) sur un GeekServo 360°, gris, pour valider la faisabilité. Ne resterait que le développement du programme, qui, à mon avis, est le plus important dans ce type de projet.
Le code fait moins de 30 lignes, ceci grâce à la fonction Go() qui a . . . . 3 lignes. Je me suis un peu amusé. L'idée, c'était de faire une fonction de guidage universelle avec un seul paramètre. Ce paramètre est basé sur les cadrans du cercle trigonométrique.
Le premier cadran permet de paramétrer la courbure à gauche ou à droite en marche avant, à 45° on avance en ligne droite. Le troisième cadran fait la même chose en marche arrière. Le deuxième et le quatrième cadrans, pour des valeurs respectives de 135° et 315°, permettent de tourner sur place, à gauche ou à droite. Avec ces derniers cadrans, on pourrait également faire varier l'angle de rotation sur place. Cela peut être une alternative au premier et troisième quadran.
Ici, le code propose une séquence de démonstration pour ma future vidéo. Bientôt.
// UGV-RollingRobot - 10/07/2022
void(* resetFunc) (void) = 0; // soft reset function
#include <Servo.h>
Servo RF,RB,LF,LB; // right servo and left servo
int Bp=A0, Speed=50;
void setup() {
delay(500); // for reset consideration
Serial.begin(9600);
pinMode(Bp,INPUT_PULLUP); // start/stop/reset button attachment
RF.attach(2,500,2500);RF.write(90); // right front servo initialization
RB.attach(3,500,2500);RB.write(90); // right back servo initialization
LF.attach(4,500,2500);LF.write(90); // left front servo initialization
LB.attach(5,500,2500);LB.write(90); // left back servo initialization
Serial.print("\n\t To start, click on the Start button"); while(digitalRead(Bp)); delay(400); Serial.print("\n\t Started");
}
void loop() {
if (! digitalRead(Bp)) resetFunc();
Go( 15); delay(5000);
Go( 75); delay(5000);
Go(135); delay(3000);
Go(315); delay(3000);
Go( 45); delay(3000);
Go(225); delay(3000);
}
void Go(int a){
// Value of a
// Forward : from 15 to 44 turn right, 45 straight forward, from 75 to 46 turn left
// Backward : from 195 to 224 turn left, 225 straight Backward, from 255 to 226 turn right
// Left spin spot : 135 , Right spin spot : 315
float S=sin(a*PI/180), C=cos(a*PI/180);
RF.write(90+(Speed*S)); RB.write(90+(Speed*S));
LF.write(90-(Speed*C)); LB.write(90-(Speed*C));
}
L'adaptateur JST PH2 vers JST 2P. https://fr.aliexpres...ayAdapt=glo2fra
Le GeekServo vert à rotation continue.
Le NANO Shield de Keyestudio.







