Mon contenu
Mon contenu Homme
Homme






La carte HuskyLens.
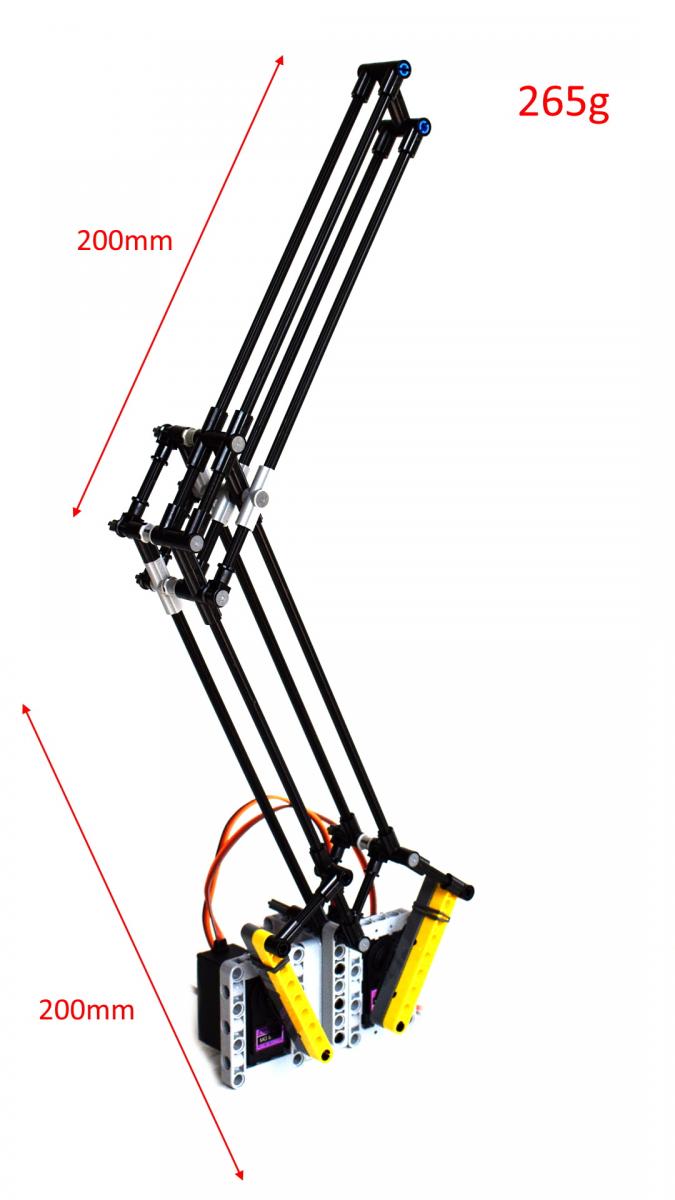
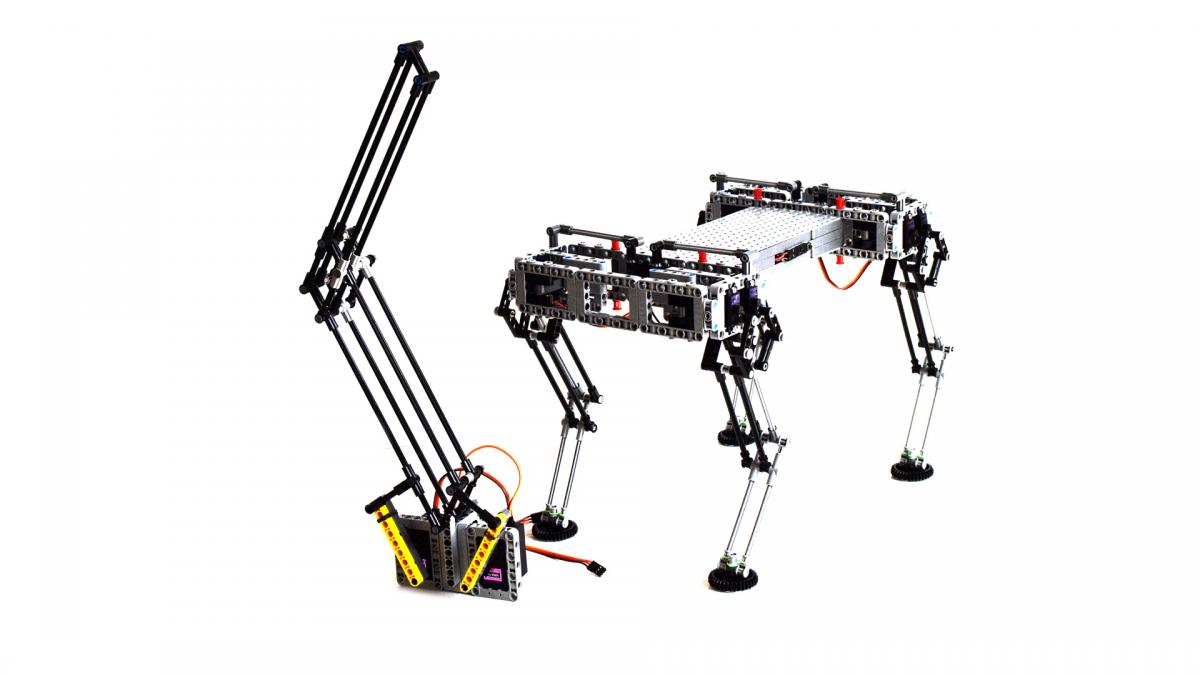
Voici un produit absolument exceptionnel ! Je l'ai commandé pour l'installer sur mon prochain quadrupède.
A la prochaine Toulouse Robot Race, il devrait me permettre de faire le circuit des "grands", mais avec un quadrupède et non un roulant.
Je ne vous en dis pas plus. Voici la vidéo et quelques liens.
https://arduiblog.co...5/24/huskylens/
https://arduiblog.co...n-et-huskylens/
https://fr.rs-online...catifs/2049900/