Mon contenu
Mon contenu Homme
Homme






Cliquez moi.
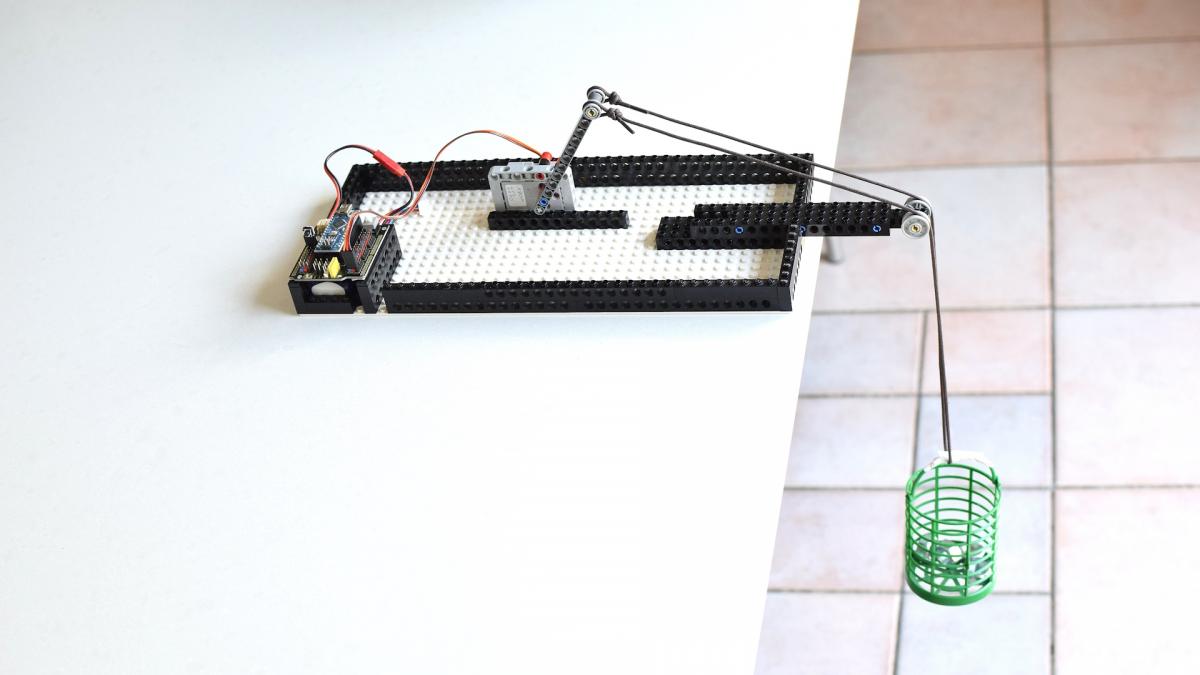
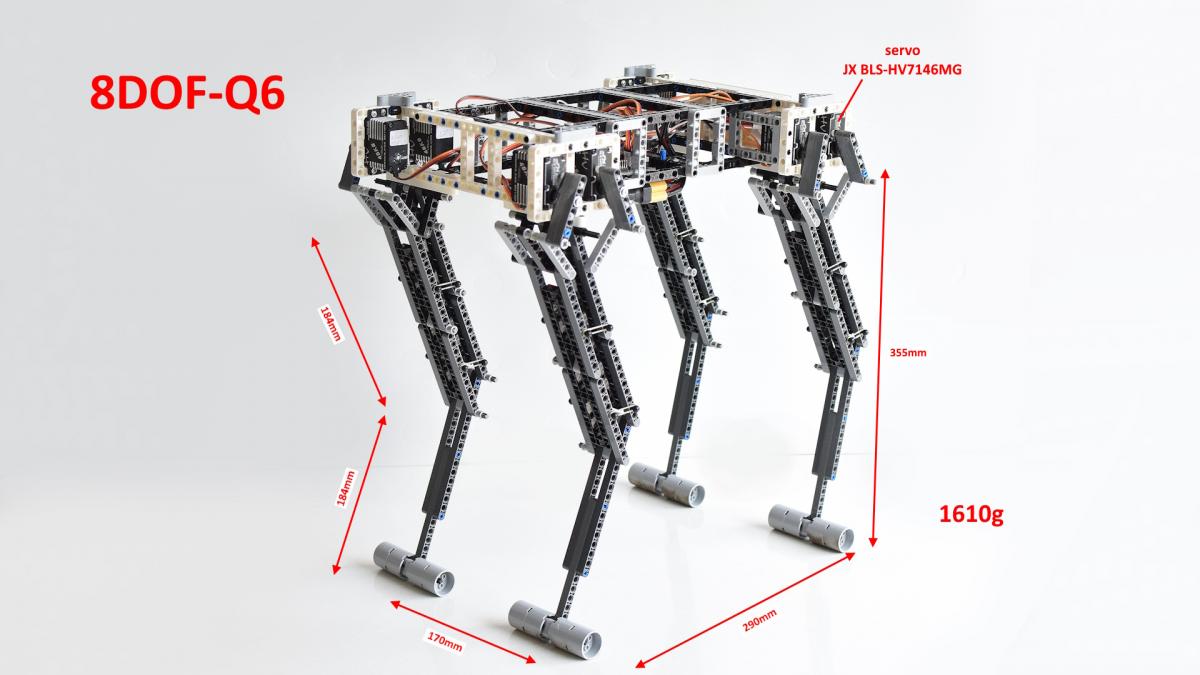
Voici la dernière version de mon banc de test pour mesurer le couple des servos.
Ici, on peut voir le GeekServo Gris en action avec une course perpétuelle de 0° à 180° qui soulève un panier dans lequel, je mets des écrous.
Le bras est une barre Lego de 13L. Soit un entraxe de 8mm x 12 = 96mm (environ 10cm . . .)
N'hésiter pas à me faire part de vos remarques.
Voici le résultat des deux servos que j'ai testé ce matin :
- le GeekServo gris, 283g.
- le SPT 2065W, 162g
Il n'y a pas photo !
- pmdd aime ceci