Mon contenu
Mon contenu Homme
Homme





Une fois rangée, aussitôt dérangée

- Path aime ceci
 Posté par
- 19 novembre 2016 - 12:16
Posté par
- 19 novembre 2016 - 12:16
Posté par
- 09 novembre 2016 - 02:17
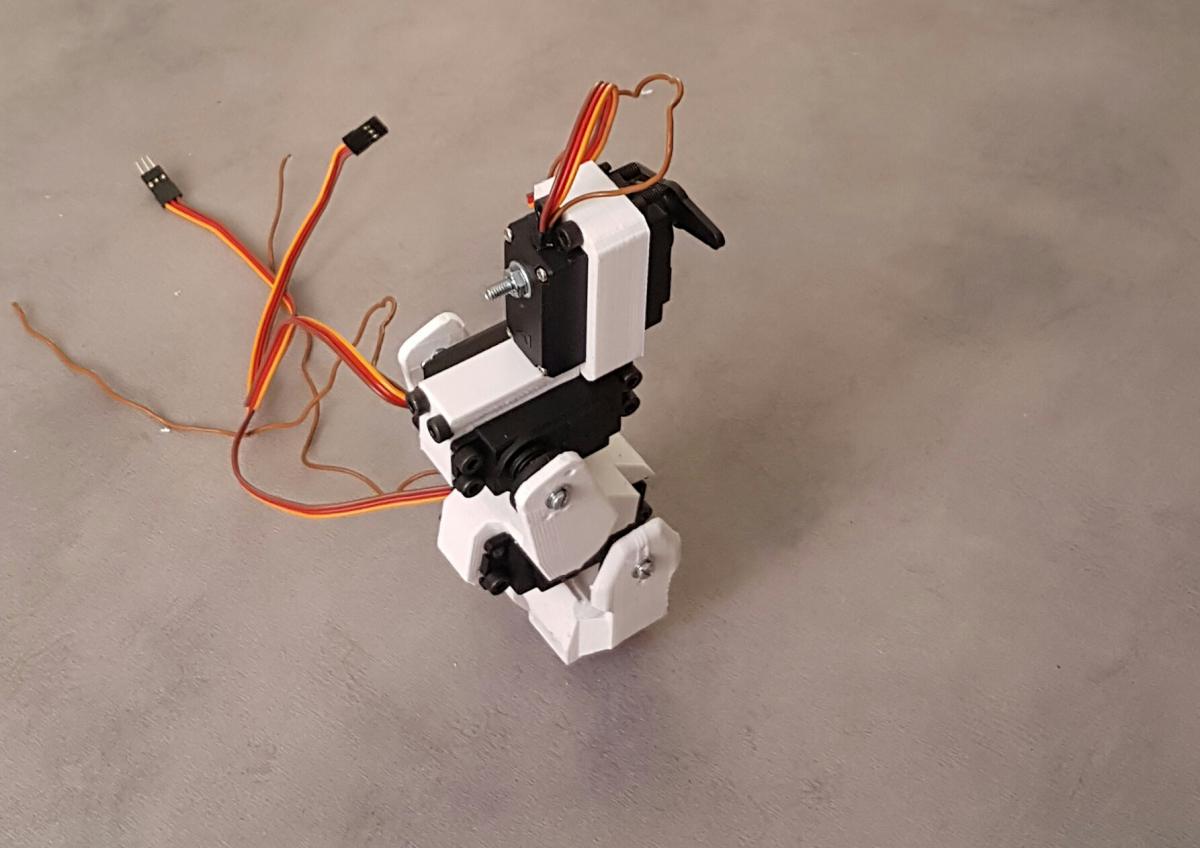
Pour ceux qui souhaite utiliser 2 de ces caméras ensemble, je vais vous montrer la façon dont j'ai procédé avec le logiciel Roborealm! 
Roborealm est un logiciel de vision par ordinateur que je trouve très pratique car il permet de faire beaucoup de chose rapidement. Il y a un grand choix de module et de filtre que l'on insert dans l'ordre que l'on souhaite pour traiter l'image. Vous pouvez l'obtenir ici http://www.roborealm.com/ pour quelques dizaines d'Euros.
Voici la manip', après avoir branché vos 2 caméras ouvrez le logiciel.
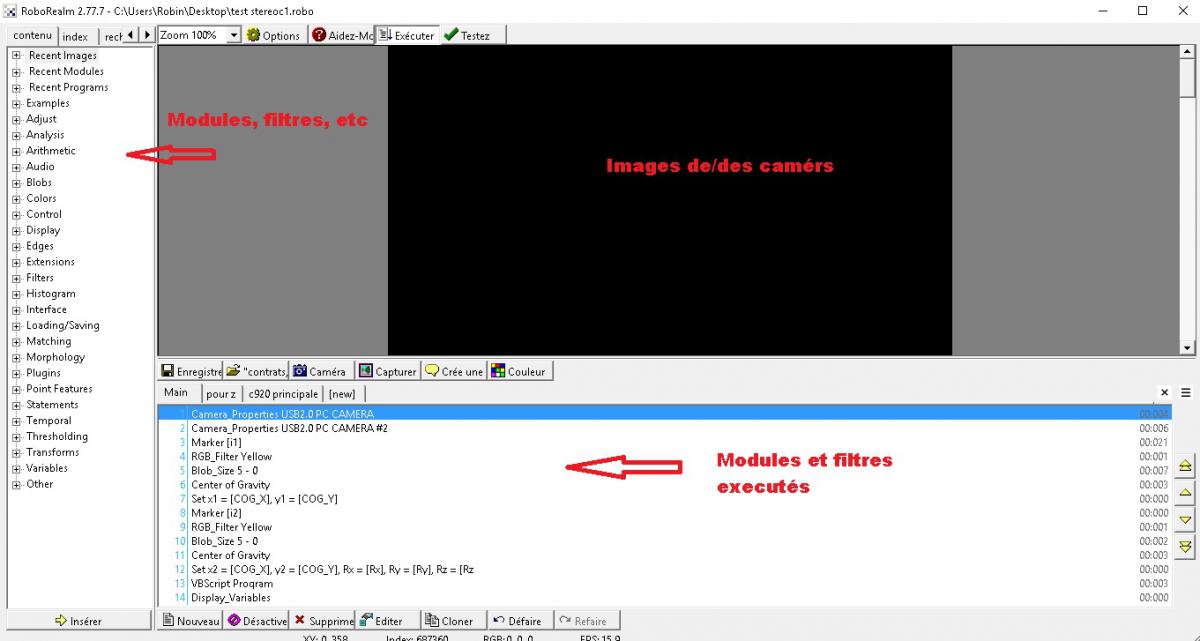
Tout ce que vous pouvez utiliser se trouve à gauche.
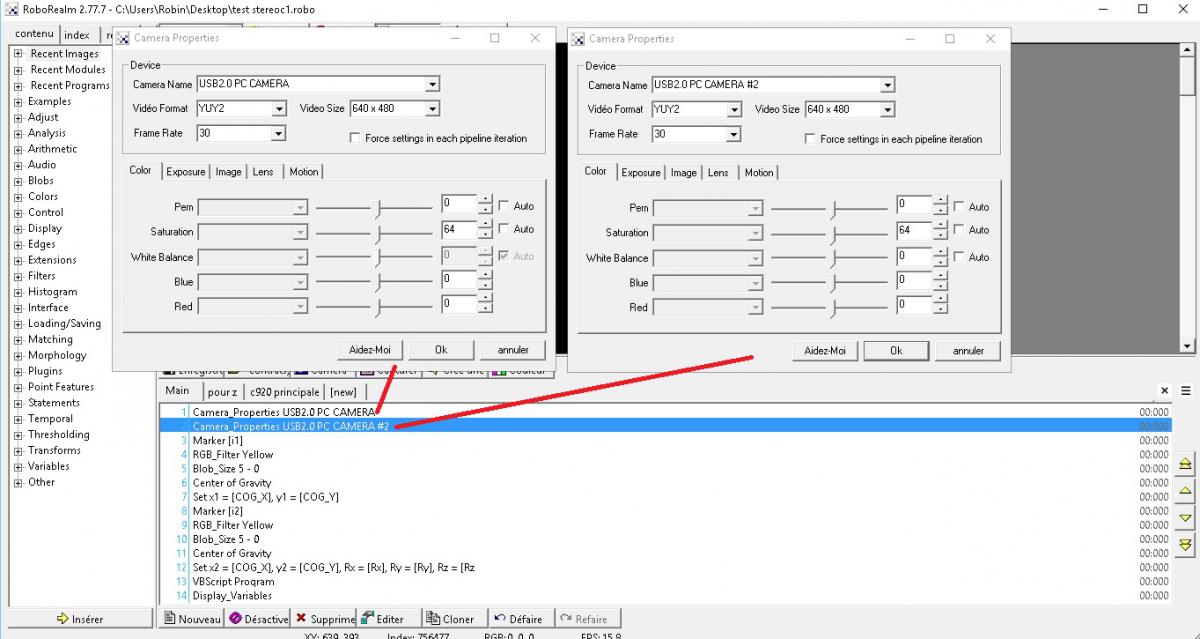
Commencez par paramétrer vos caméras. Dans "Adjust" selectionner "Camera_properties" et choisissez résolution, images par seconds etc... les paramètres doivent être les même pour les 2 caméras.
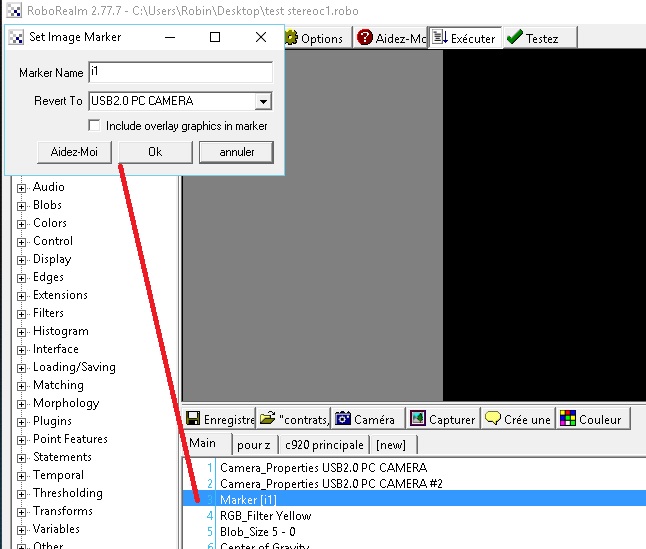
Allez dans "Other" et selectionnez "Marker". Selectionnez une première caméra et donnez un nom au marker.
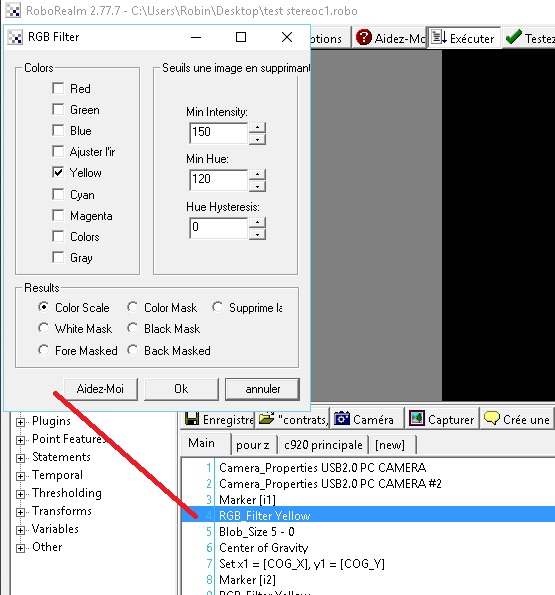
Dans "Colors" selectionez "RGB_Filter", sélectionnez la ou les couleurs que vous souhaiter reconnaître. Si à la place d'une simple couleur vous voulez reconnaître un visage, une forme spécifique, une image enregistrée... ou même un mélange de tout ça, d'autre filtre sont disponible!
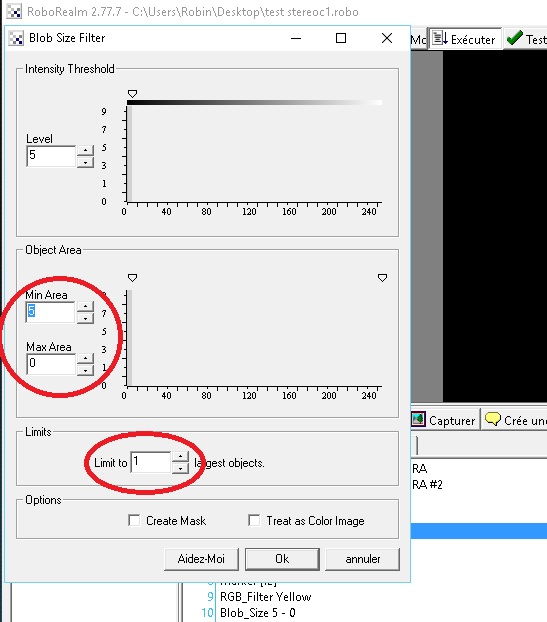
Pour isoler l'objet de couleur des parasites de même couleur, allez dans "Blobs" et sélectionnez "Blob-Size". Mettez le paramètre dans limite à 1 pour afficher seulement le plus gros de pixel, et régler les autres paramètre en fonction de vos parasites. Réglez les autres paramètres en fonction de ce que vous voyez à l'écran, le but c'est d'isoler votre objet.
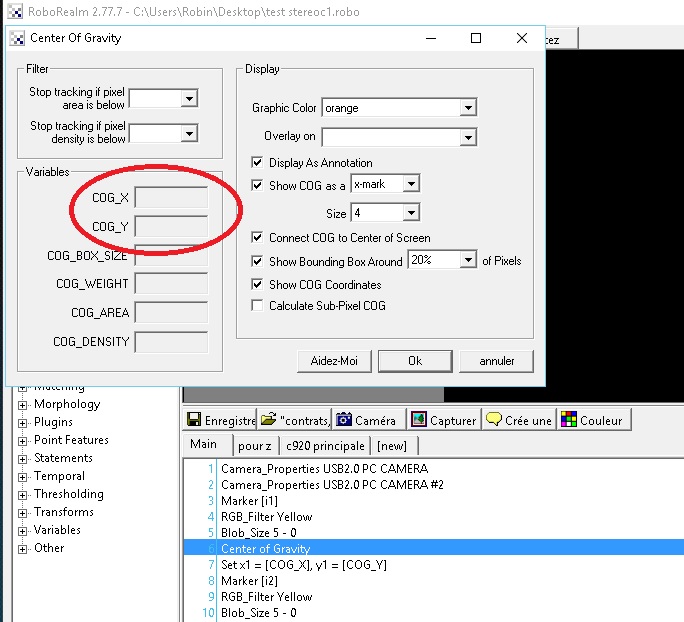
Dans "Analysis" sélectionnez "Center_of_Gravity". Ça permet de mesurer le centre de ce qui a été reconnu précédemment. On obtient plusieurs informations, on va seulement utiliser "COG_X" et "COG_Y" (coordonnées en x et y).
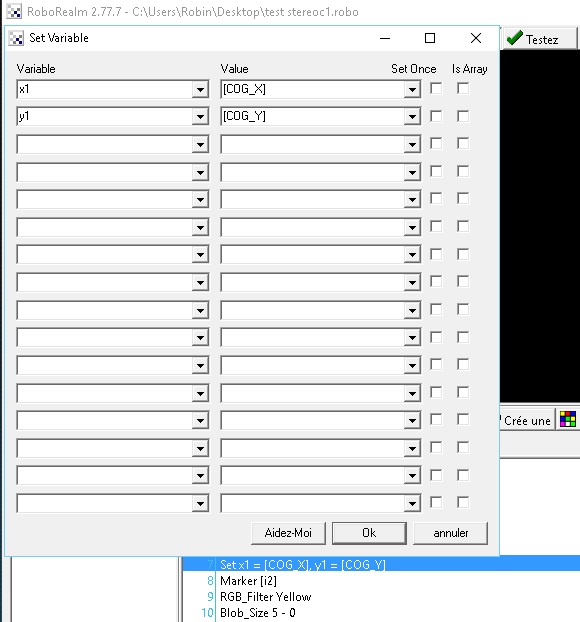
Allez dans "Variables" et sélectionnez "Set_variable". Entrez dans "variable" un nom pour la coordonnée x de l'objet de la première caméra, et dans "value" selectionnez "COG_X". Faites la même chose pour y ; "COG_Y".
Voila pour la première caméra! Il faut refaire la même chose avec l'autre. Recommencez la manip' à partir du Marker en sélectionnant la 2ème caméra.
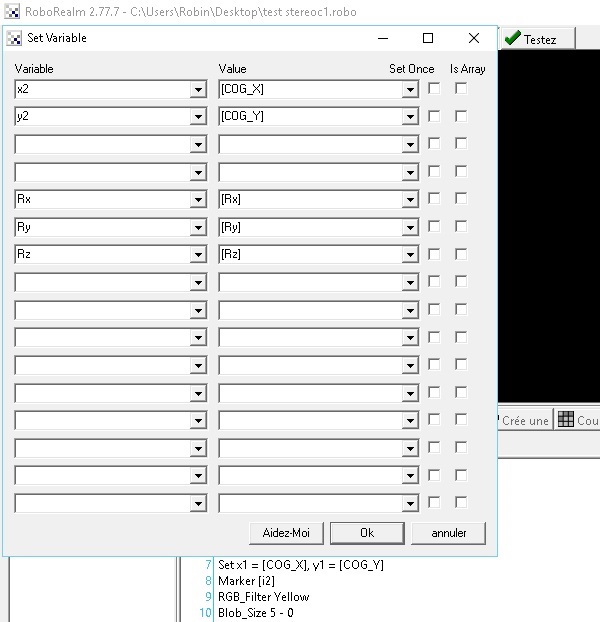
Aprés le 2ème centre de gravité, sélectionnez ces 5 "value" et donnez leur un nom.
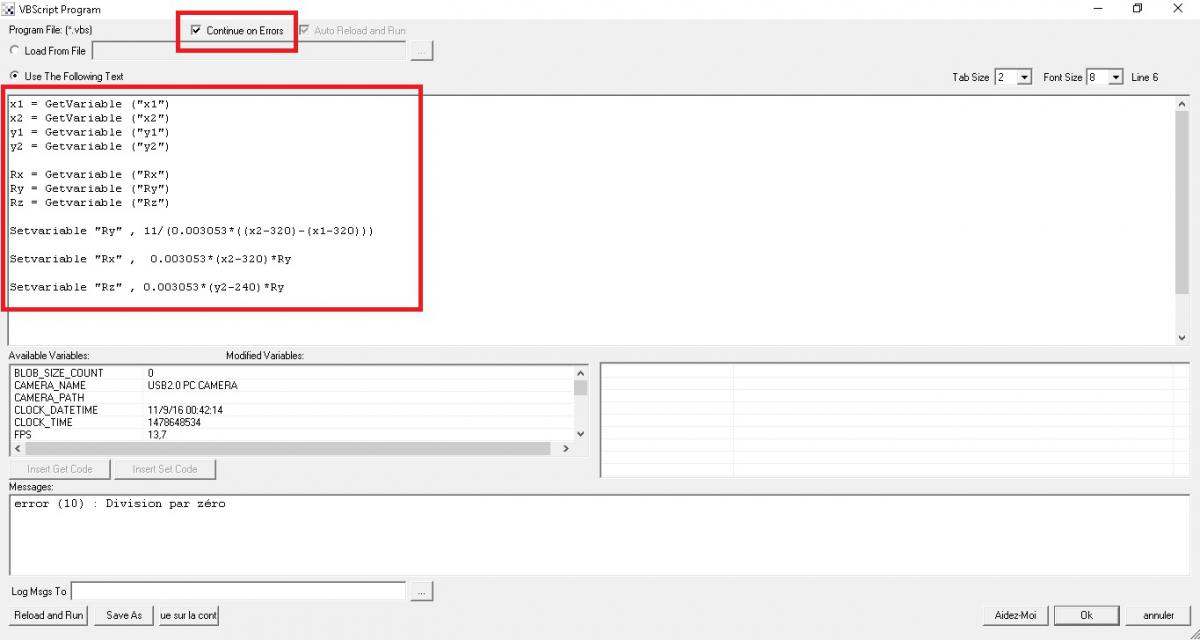
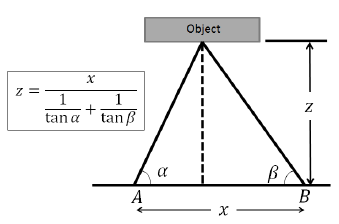
Maintenant on va écrire les formules pour calculer les coordonnées dans l'espace de l'objet reconnu.
Dans "Extensions" puis "Scripting", choisissez le langage de votre choix (ici "VBscript"). Ecrivez les lignes de codes comme sur l'image en changeant le 11 du calcul de Ry par la valeur entre vos 2 caméras et n'oubliez pas de cocher "Continue on Errors". Ça permet au script de ne pas bloquer si l'objet est mal reconnu.
Ces 3 formules sont valables uniquement pour cette caméra, mais utilisables dans n'importe quel autre logiciel!
Voila, vous pouvez localiser votre objet dans l'espace avec pour origine du repère la première camera!
Vous pouvez aussi n'utiliser qu'une seule caméra en la disposant à une distance Ry constante de l'objet. Par exemple à 30cm au dessus d'un convoyeur pour mesurer le positionnement des objets sur le tapis. Dans cette configuration (1 caméra ) Rx et Rz sont calculés avec une plus grande précision!
N'hésitez pas à me dire si certaines étapes ne sont pas très claires 
Posté par
- 05 novembre 2016 - 07:13
Posté par
- 01 novembre 2016 - 03:15

 en livraison, je devrai les recevoir bientôt.
en livraison, je devrai les recevoir bientôt.
Posté par
- 31 octobre 2016 - 08:02
Posté par
- 29 octobre 2016 - 07:01
Posté par
- 28 octobre 2016 - 07:06
 au bout d'une certaine distance la balle est mal reconnue, vers la fin on voit bien que ça perturbe le calcul. (Ce qu'il faut regarder c'est "Ry" sur l'ecran)
au bout d'une certaine distance la balle est mal reconnue, vers la fin on voit bien que ça perturbe le calcul. (Ce qu'il faut regarder c'est "Ry" sur l'ecran)
Posté par
- 25 octobre 2016 - 04:19
Posté par
- 15 octobre 2016 - 09:19
Posté par
- 09 octobre 2016 - 10:50
Posté par
- 05 octobre 2016 - 10:07

Posté par
- 29 septembre 2016 - 12:16
Normalement il n'y a pas de photo en trop (100), la petite sacade vient peut être de la conversion en gif.
Posté par
- 28 septembre 2016 - 11:02
Bonsoir à tous!
Je crée un nouveau sujet pour suivre mon prochain test qui portera sur le DM432C, un driver de moteur pas à pas!
Au déballage il fait bonne impression, surement parce qu'une partie de son boitier est en aluminium.
Voila la documentation : DM432Cm.pdf 938,46 Ko
1126 téléchargement(s)
DM432Cm.pdf 938,46 Ko
1126 téléchargement(s)
On voit qu'il y a pas mal de caractéristique intéressante, comme l'anti résonance et une fonction micro step plus poussée.
A bientôt pour le triturage du driver !