

 Mon contenu
Mon contenu Homme
Homme





 Posté par
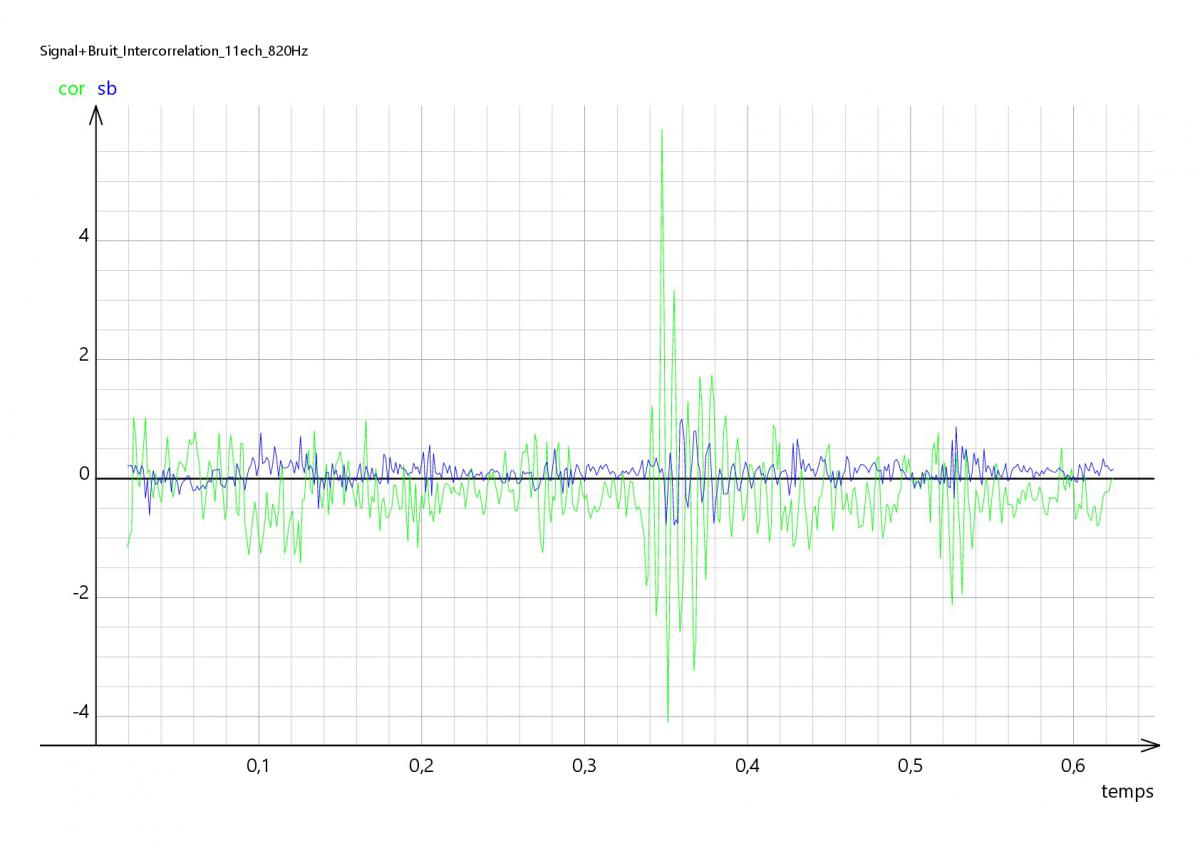
Posté par Si vous cherchez à détecter un signal particulier noyé dans du bruit, je viens de faire un test d'algo d'intercorrélation avec un signal simple, une sinus à 2kHz.
Aucun filtre nul part, ni analogique ni numérique.
(faut mettre du son!)
Normalement ça marche mieux avec un signal plus compliqué, genre une sinus avec sa fréquence qui augmente.
Edit:
Un 2ème test qui montre à quel point c'est sélectif. Je détecte mon signal de 2kHz à 20Hz prés! Impec pour faire du multi-canal^^
- Oliver17 aime ceci

 )
)




