Mon contenu
Mon contenu Homme
Homme





 Posté par
Posté par Salut !
Loin de moi l'idée de faire de la concurrence à Donovandu88 avec son super bras robot BCN3D Moveo mais ce sujet est dédié au montage et au test du kit bras rotatif et pince robot qu'il y a dans la boutique !
Ce kit est composé de toutes les pièces mécaniques et visserie nécessaire pour assembler un bras robotique 6 DOF.
Par contre, les servo moteurs ne sont pas fournis avec, j'utilise les servo MG995 qui sont parfait pour cette application.

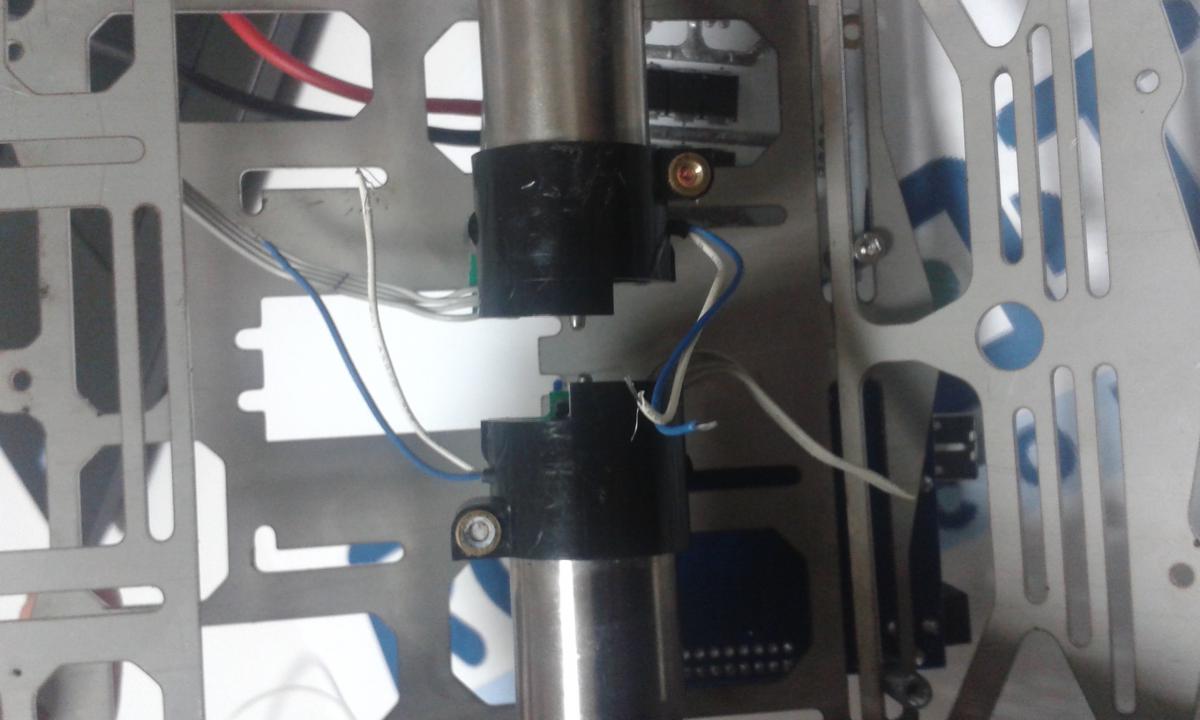
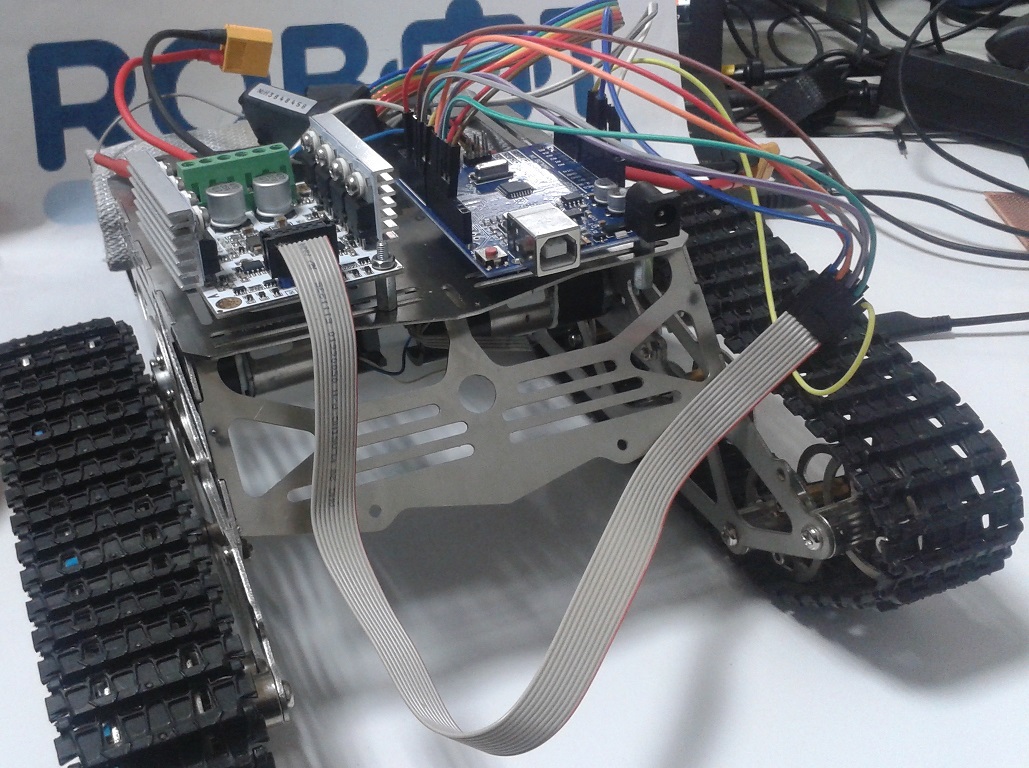
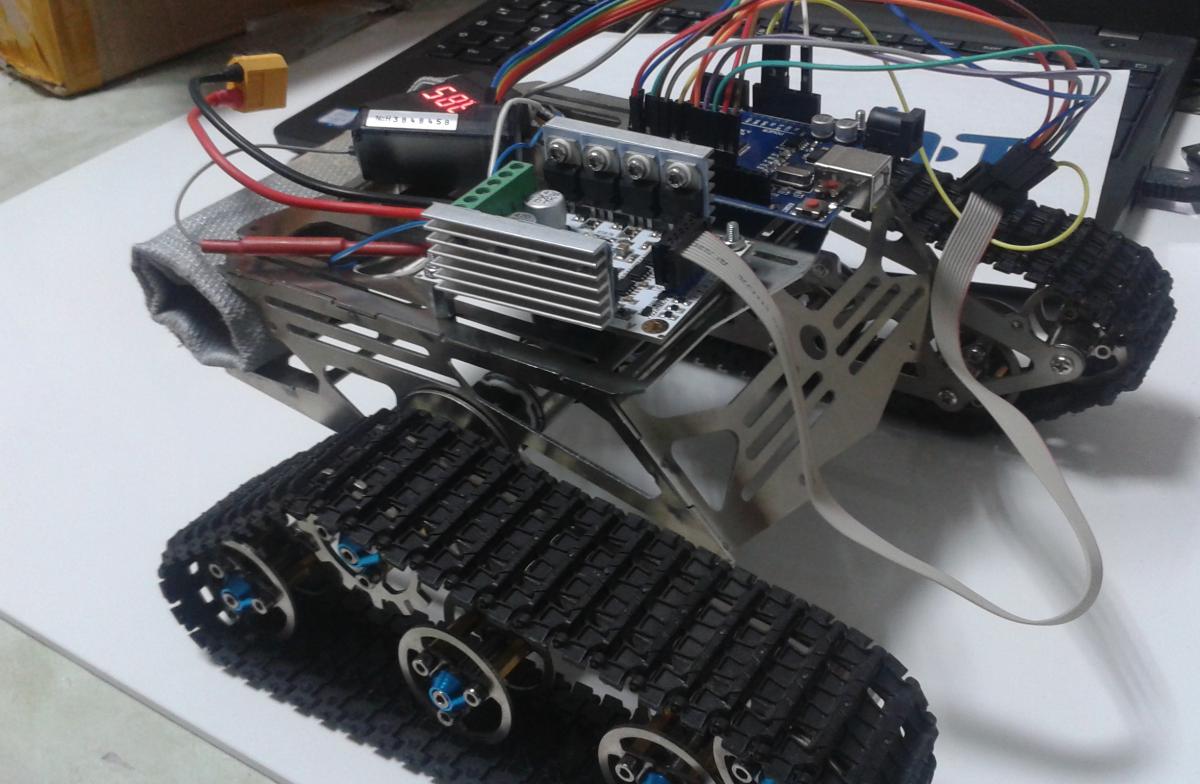
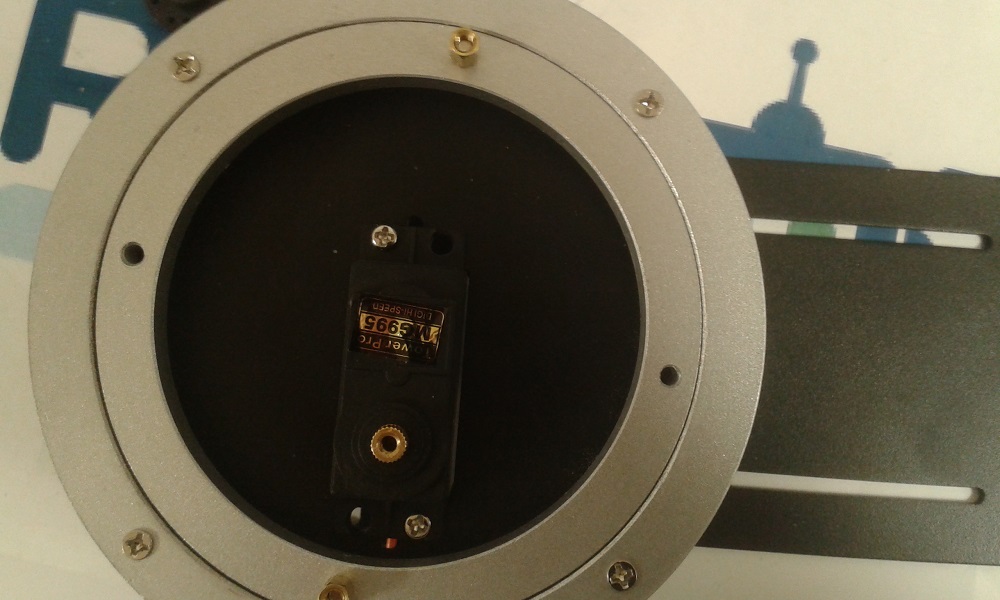
Je mets quelques photos du montage :
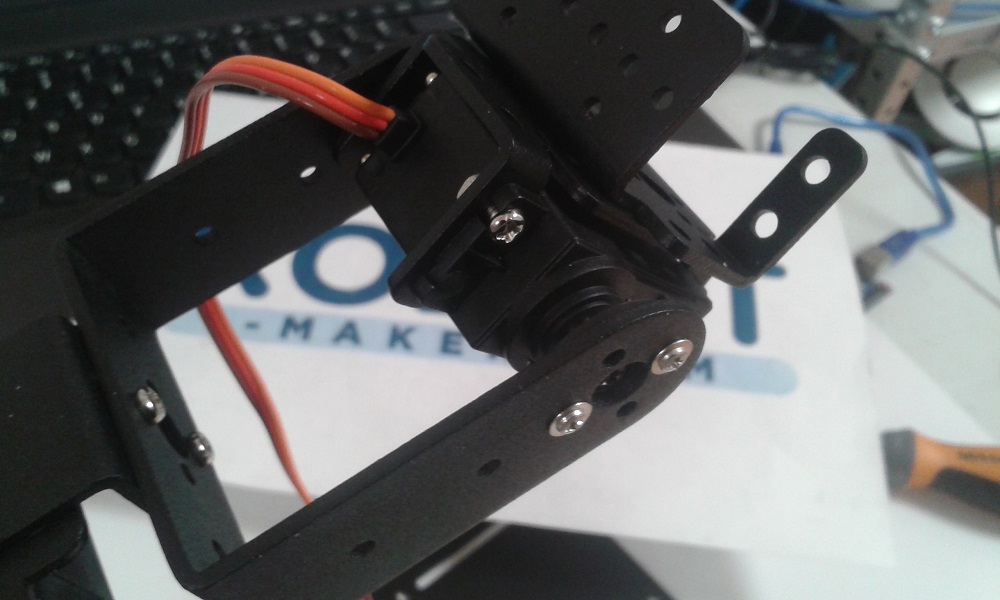
en commençant l'assemblage de la base tournante et du premier servo

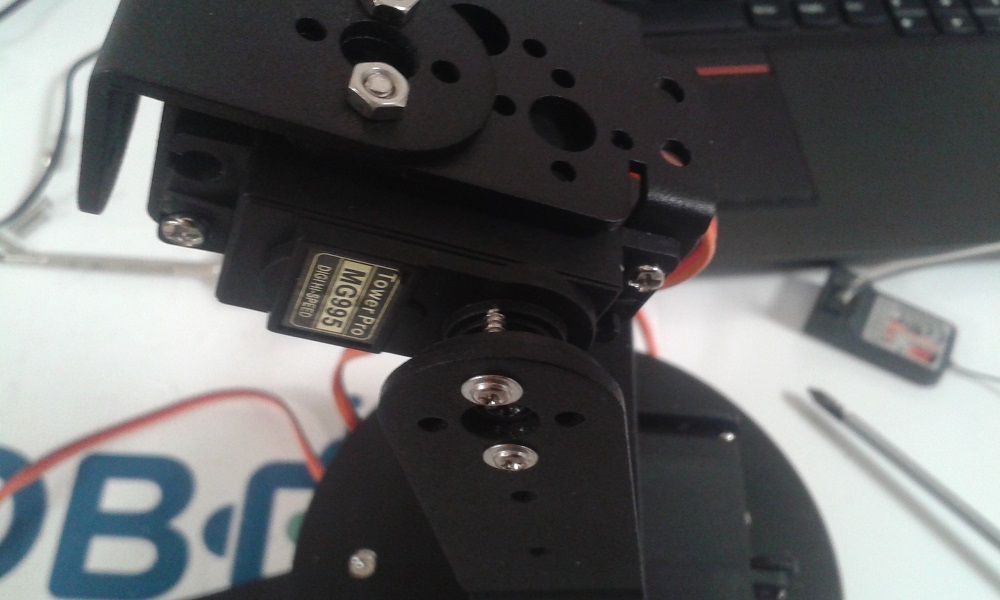
Ensuite on passe à la partie supérieure

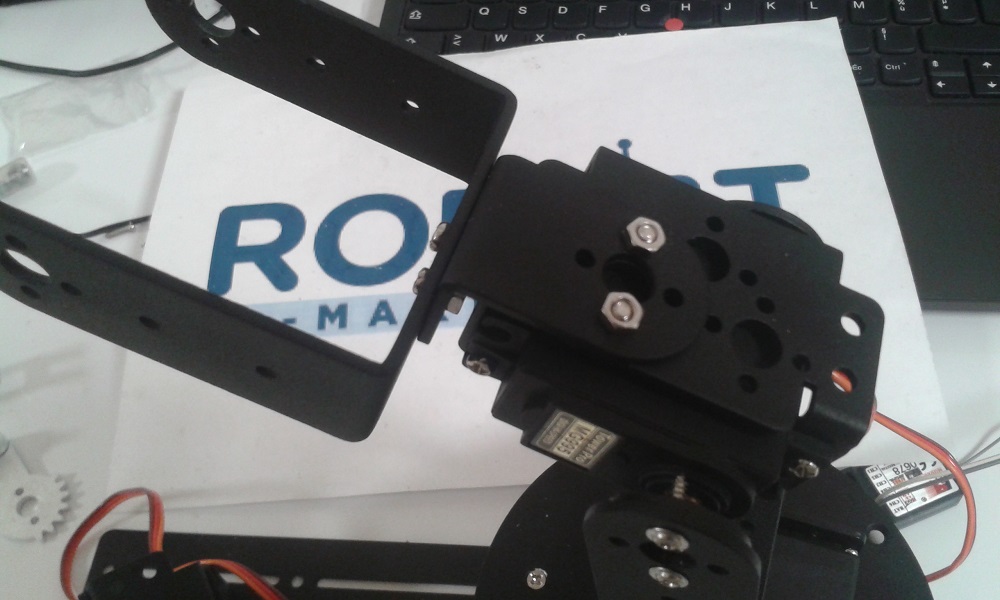
Et enfin le montage de la pince
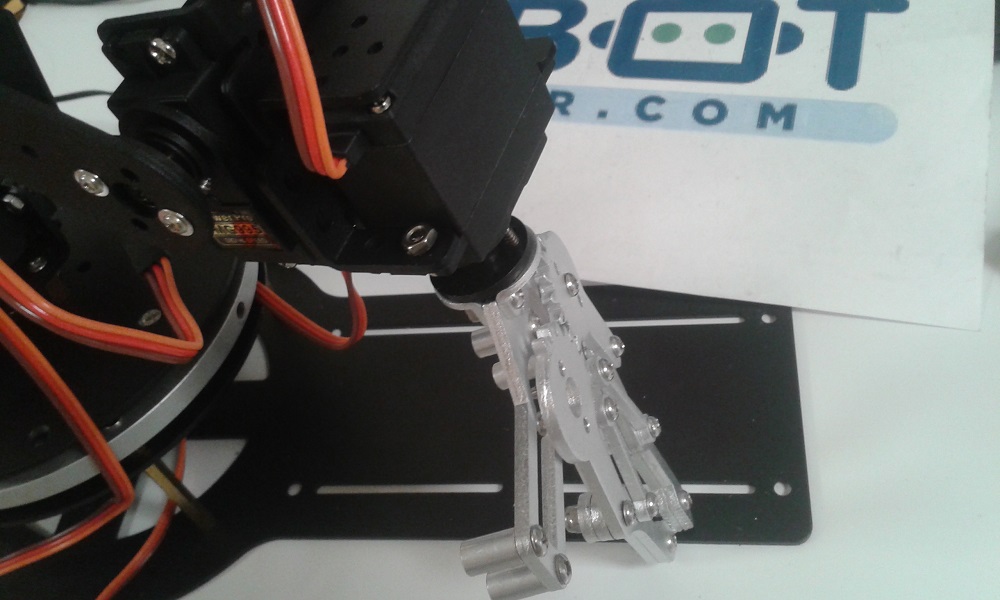
Le bras est monté !

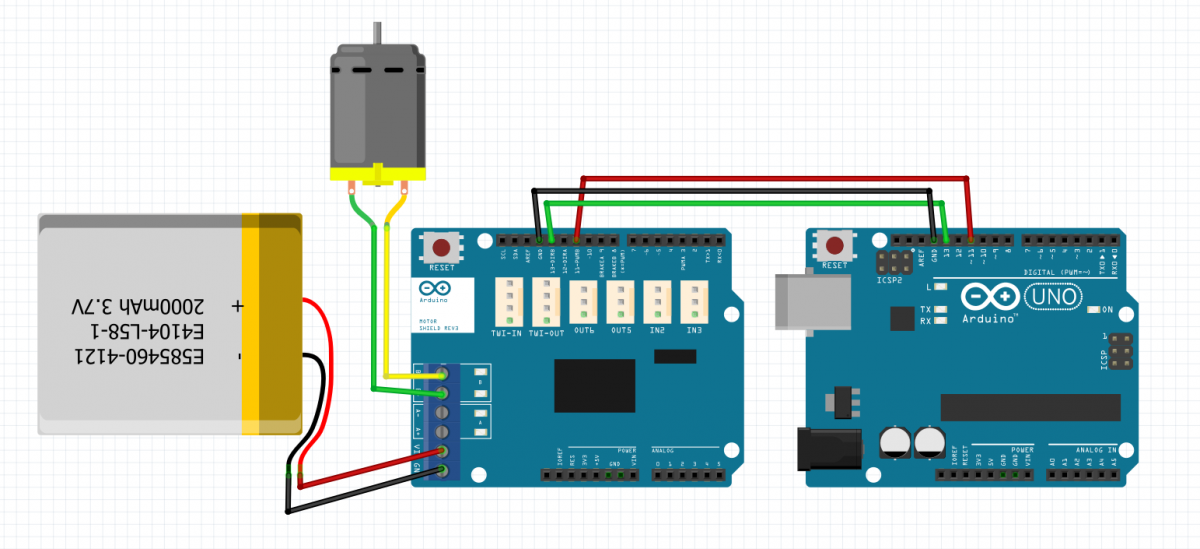
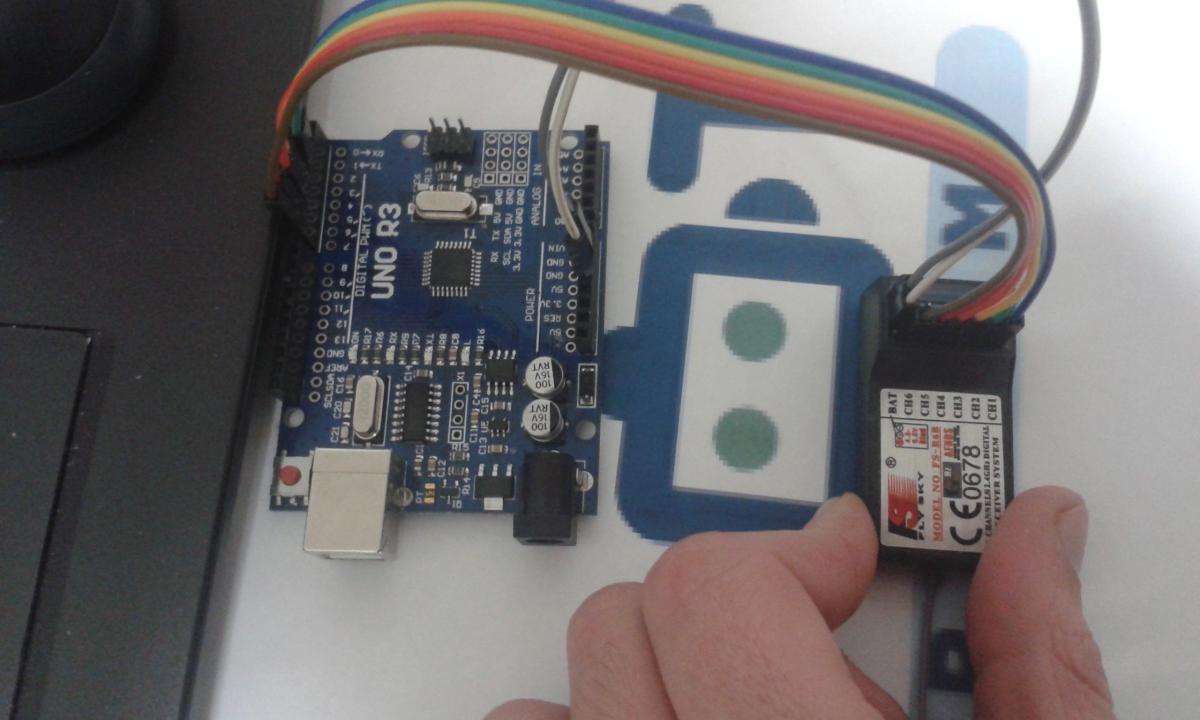
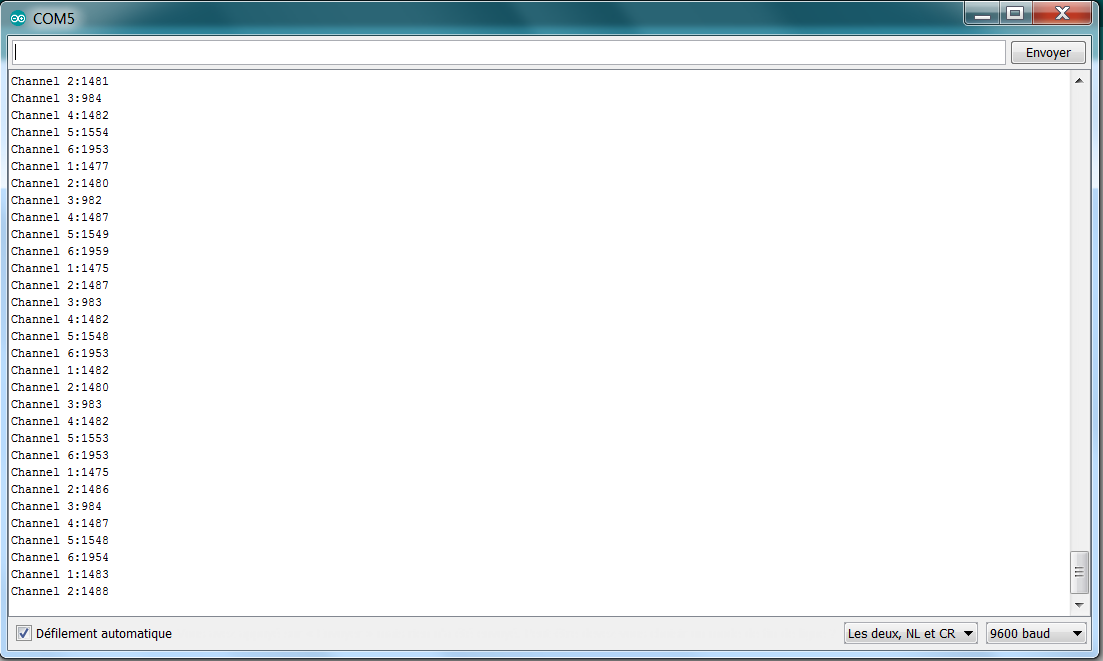
Pour faire fonctionner le bras j'utilise le driver 16 servo I2C et une arduino uno. Jekert a testé ce driver sur le forum !
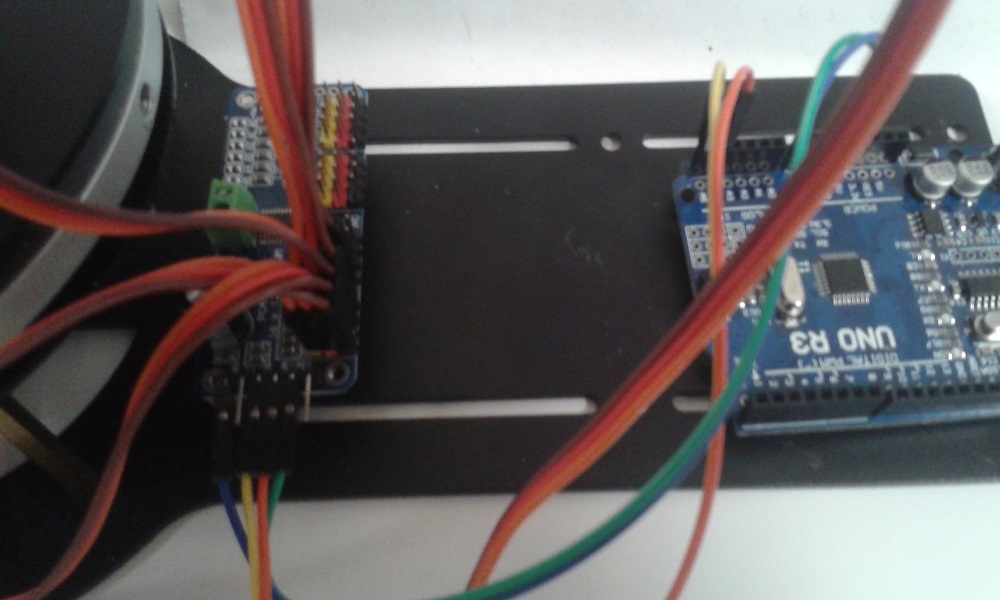
Pour alimenter les moteurs, une batterie LiPo 12V est suffisante, avec un convertisseur 5V 7A. On peut utiliser un convertisseur 5V 5A mais au delà de trois moteurs en action il n'y a plus assez de courant.
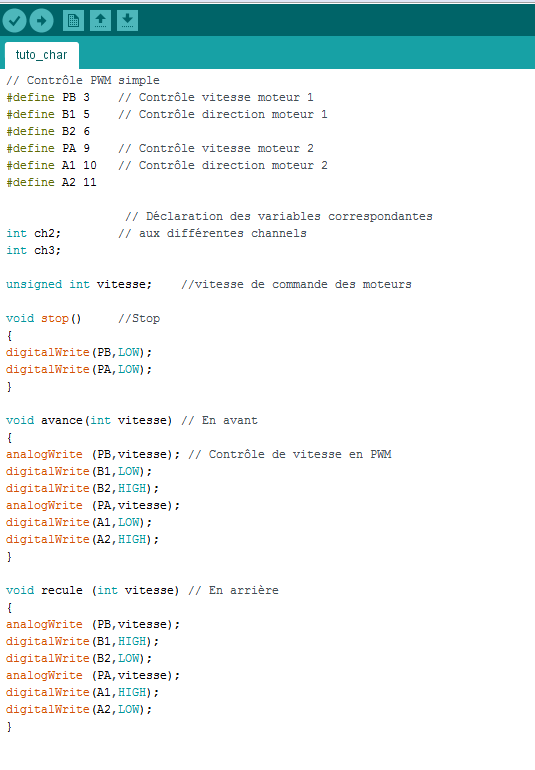
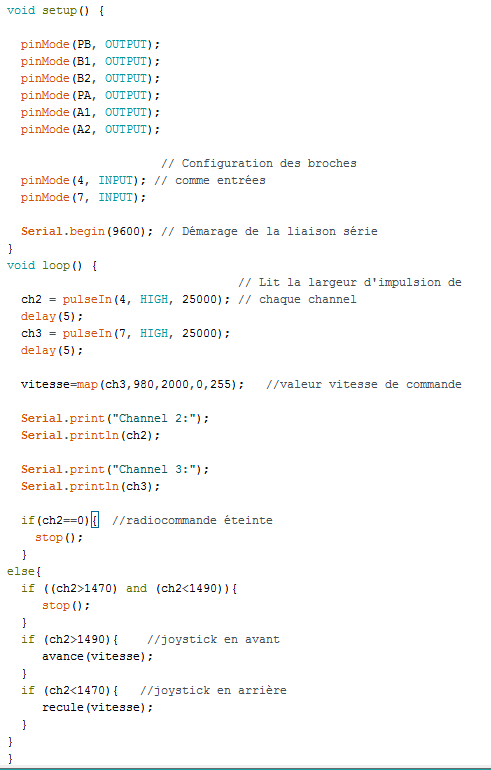
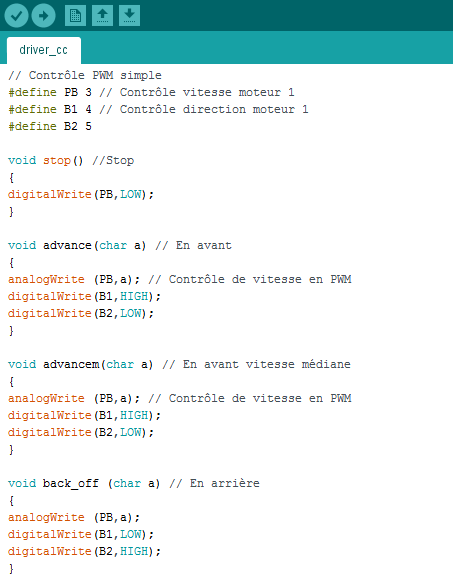
Pour le programme, il suffit d'adapter celui posté par Jekert pour contrôler plusieurs servos dans le test du driver !
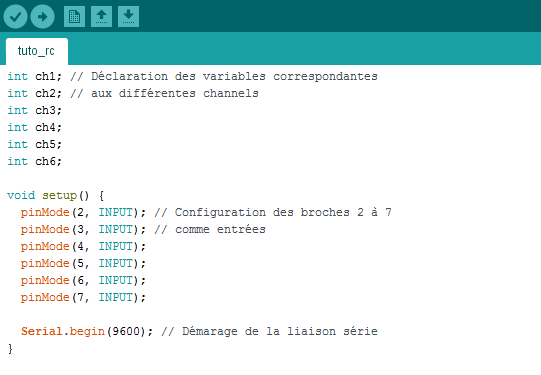
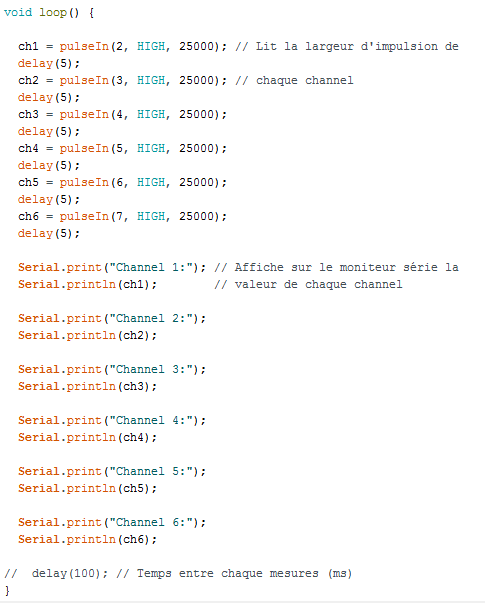
Voici un exemple de programme que je n'ai pas encore testé :
Et il ne reste plus qu'à programmer une jolie chorégraphie 


 .
. )
)


 .
. en incrémentant une variable à chaque front montant du signal du bouton B.
en incrémentant une variable à chaque front montant du signal du bouton B. .
.


 .
.