Merci à tous pour vos retours, ça me fait vraiment plaisir.
Exploitation de la caméra Wii RemoteMême si le site est en ligne, le travail sur BOB4 n'est pas fini pour autant.
Je me suis attaqué à l'exploitation sur le drone de la caméra Wii-Remote. Pour rappel, cette caméra détecte des spots IR et donne directement leur coordonnées 2D dans l'image.
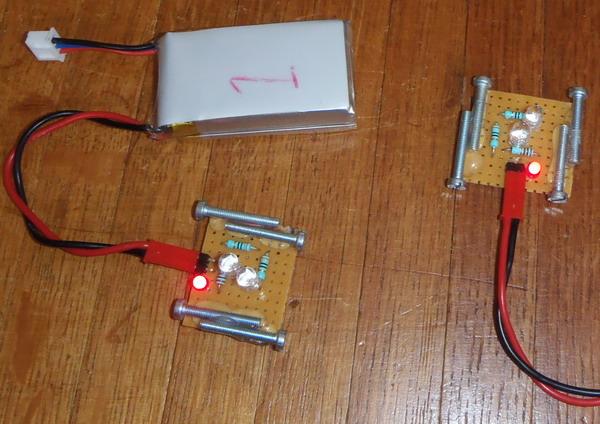
J'utilise des balises assez simples, faites de 2 LED IR 70mA.
Elles sont alimentées avec mes anciennes batteries 7.4V qui ne me servent plus à rien, vu que j'ai du racheter des batteries 11.1V.
Pour calibrer la caméra, je pose le drone à plat sur une plaque de plexi à 2m du sol (en équilibre en haut d'une étagère), et je déplace la balise au sol dans des positions choisies.
Pour la partie algorithme, je vous renvoie vers le site:
http://heli.bot.free.fr/algo_1.html#interp_wiiVoici une première vidéo avec la caméra Wii, simplement équipée de son filtre IR. Je pilote le drone en manuel. Sur la visualisation Matlab 3D à droite, le bitonio minuscule posé au sol, c'est la balise.
Quand elle est verte, c'est que le drone voit la balise.
Quand elle est rouge, vous l'avez deviné, c'est quand le drone ne voit pas la balise (hors champ de vision).
http://www.youtube.com/watch?v=tH3JN5bLvtc
Qu'est-ce qu'on voit sur cette vidéo?
Tout d'abord, on s'aperçoit que quand c'est vert, la position estimée n'est pas déconnante.
MAIS le drone perd très souvent la balise, même si je le fais voler dans une zone assez restreinte.
Bref, la camera Wii-Remote a un champ de vision trop réduit, trop "zoomé". Sa focale est trop grande.
C'est un problème... Et a chaque problème sa solution! (il faut le dire vite, quand même)
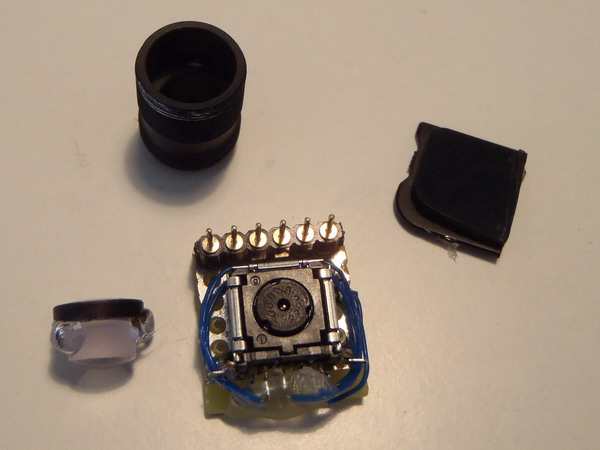
De l'optique... Voilà ce qu'il me faut. En fait, la caméra Wii-remote a déjà son propre objectif, microscopique et indémontable.
Il faut donc trouver un DIVISEUR DE FOCALE! Un truc qui permette de voir plus large, tout en voyant toujours net (c'est important), et sans avoir besoin de démonter l'objectif d'origine.
Mais où donc trouver ça pour une caméra aussi petite??
J'avais acheté, pour d'autres usages, une petite caméra vidéo avec plusieurs mini-objectifs de focales différentes.
J'essaye en mettant les objectifs sur la caméra wii, ça ne donne rien. C'est normal, ce sont des objectifs qui sont faits pour focaliser une image.
Bon, je démonte 1 puis 2 de ces objectifs. Dans chaque objectif, il y a 3 lentilles en verre. J'ai donc 6 petites lentilles en verre, très différentes les unes des autres.
J'essaye différentes configurations d'assemblage de lentilles, je tatonne. Je sais qu'il faut que je voie net en regardant à travers le montage, car c'est un changeur de focale, et il faut que le voie plus large que la normale. Bref, comme dans un judas de porte.
Je retiens 2 configurations qui me semblent pas mal, réalisées avec 2 lentilles chacune.
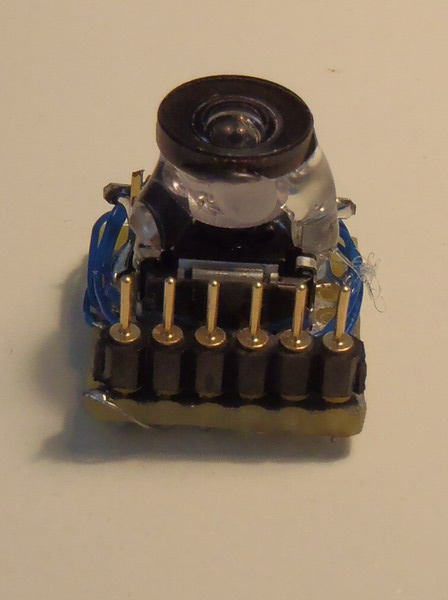
J'assemble ça temporairement avec du scotch, et ça fonctionne! J'ai à priori divisé par 2 la focale, donc augmenté par 2 le champ de vision.
Bon, maitenant, comment assembler le tout? La solution, c'est le bon vieux pistoler à colle! C'est moche, mais ça fonctionne très bien!

Et le tout monté sur le drone:
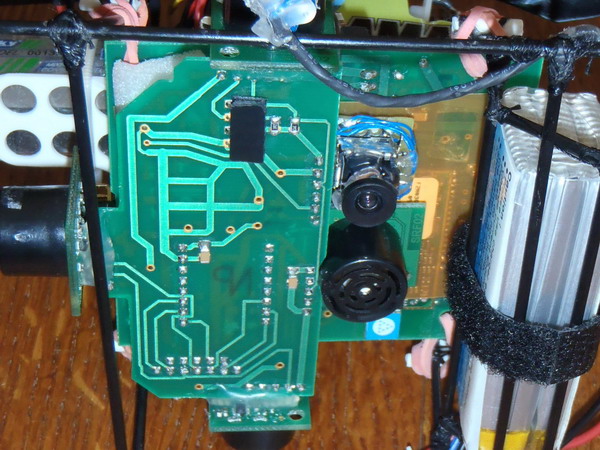
On re-calibre tout, et on essaye.
Voici la nouvelle vidéo avec le changeur de focale.
http://www.youtube.com/watch?v=xnyb8ltVPbY
Le résultat me convient beaucoup mieux! En fait, c'est exactement ce que je souhaitais voir! Remarquez que je taquine volontairement plus le drone, le périmètre d'évolution est plus large.
Le gros avantage de la caméra par rapport aux sonars, c'est qu'il n'y a plus besoin d'y avoir un mur à regarder, et on n'est pas obligé de rester bien perpendiculaire au mur. Bref, ça me semble vraiment prometteur!
Pour finir, je vous informe que je ne peux plus voler pour l'instant,
parce que je n'ai plus de pales de rechange! Dire que j'avais 24 pales de rechanges au départ...
A raison de 2 pales en moyenne détruites par crash, je vous laisse calculer le nombre de crash!
Oui, c'est clairement du mauvais traitement de drone.
Bref, le projet est toujours aussi passionnant, et ça m'emène là où je ne pensais pas aller. Je n'aurais jamais cru faire de l'optique avec ce projet!
J'ai rarement pris autant de plaisir dans un projet perso.
Leon.

































{kind=link}