Dans ce premier programme, vous avez utilisé quelques blocs. Nous allons en voir quelques-uns de plus près, mais il est indispensable de vous référez à l’aide l’EV3 pour plus de détails, voir plus bas.
Les blocs moteurs sont ceux qui nous intéressent le plus en tant que passionné de robotique.
Le bloc « Gros moteur »
Il fait référence à un gros servomoteur d’une puissance de 45N/cm.
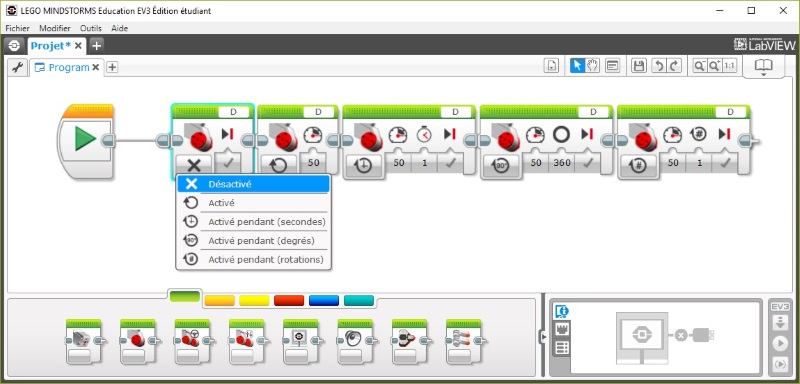
Le moteur indiqué sur la barre verte, est celui connecté à l’entrée D.
La brique EV3 possède 4 entrées moteur, A, B, C, D.
Sur le bouton de gauche, le « sélecteur de mode », vous pouvez voir les différentes utilisations possibles. En effet, un bloc possède plusieurs « modes » pour lesquelles les paramètres sont auto adaptatifs.
Dans cet exemple, j’ai aligné les différents « modes » de ce bloc.
- À gauche, le mode « Désactivé » qui comme son nom l’indique désactive le moteur. Le paramètre, juste à droite du mode, ici, ne sert à rien.
- À sa droite, le mode « Activé », pour activer le moteur, à droite du mode, vous pouvez ajuster le paramètre « puissance » qui va de -100 à +100.
- Puis le mode « Activé pendant temps ». Ce moteur active le moteur pendant 1 seconde comme indiqué. Le paramètre « puissance » est toujours à 50. À l’extrême droite, ce paramètre indique si à la fin de sa rotation, le moteur est en roue libre ou bloqué.
- Puis le mode « Activé pendant degrés ». Identique au précédent, mais en indiquant un nombre de degré, ici 360, qui est peut être égale par exemple à 720° ce qui qui correspond à 2 tours.
- Puis le mode « Activé pendant rotations ». On indique le nombre de tour que le moteur doit faire, ici 1.
Le bloc « Déplacement et direction »
Ce bloc est particulièrement bien adapté aux robots à deux roues. Sans doute les plus courants.
L’idée est de faire varier séparément la vitesse de 2 moteurs en fonction des courbes que dessine le robot en roulant. En quelque sorte, une gestion automatique du différentiel des 2 roues motrices.
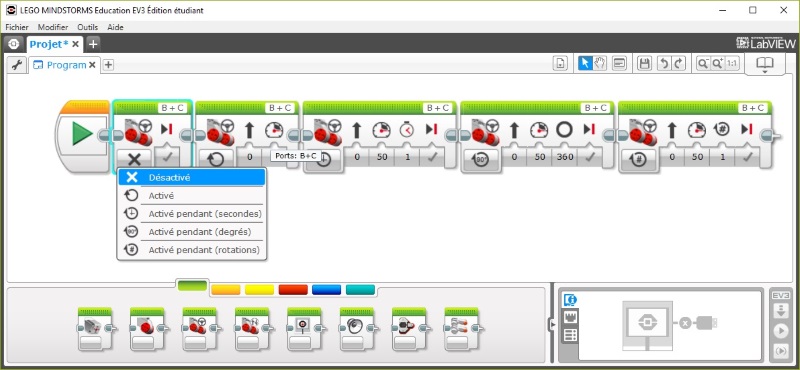
- Ce bloc reprend le même principe de fonctionnement que le bloc « Gros moteur », mais il active 2 moteurs simultanément, ici B et C. Le paramètre de direction, le premier à gauche, détermine l’indice de braquage du mobile, de -100 à +100. Ici la valeur 0 indique que le mobile doit aller en ligne droite.
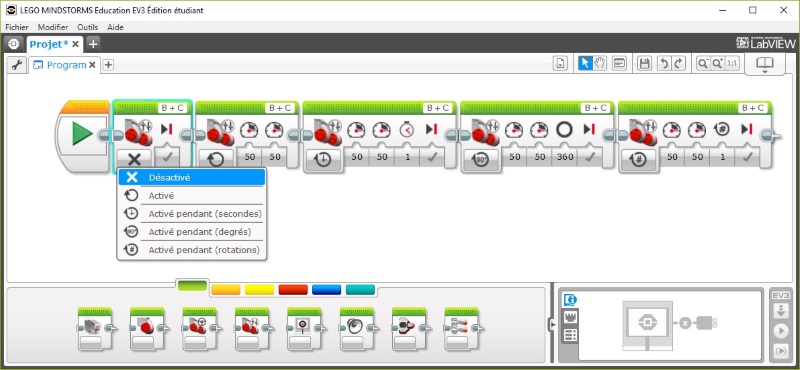
Le bloc « Déplacement char »
Comme le bloc « Déplacement et direction », ce blocs pilote 2 moteurs, mais c’est au programmeur qu’incombe de faire varier la puissance de chaque moteur.
Le bloc « Attendre »
Comme son nom l’indique, le bloc « Attendre » attend qu’une action se soit déroulée avant de poursuivre la séquence d’instructions de votre programme.
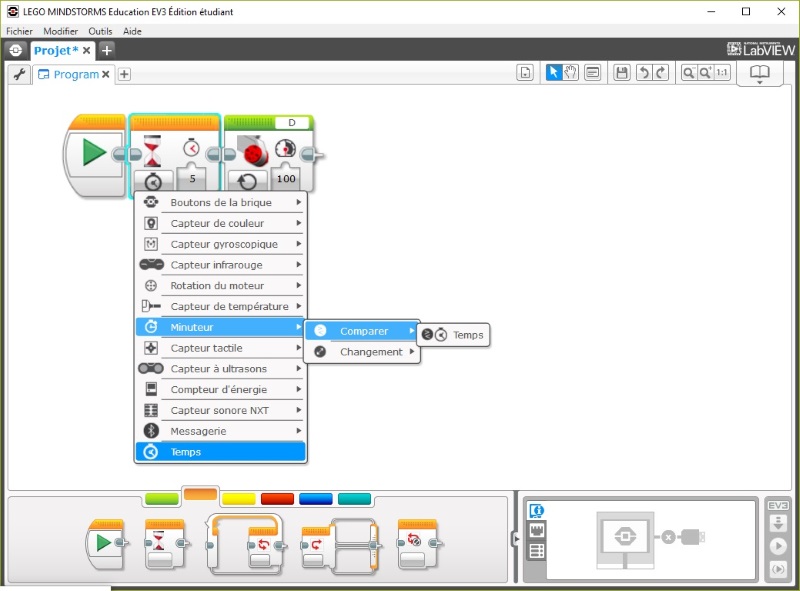
- Ce bloc possède un nombre important de mode correspondant à toute sorte de situation telle qu’appuyer sur un bouton de la brique ou valeur de l’état d’un capteur. Dans notre exemple, le mode « minuteur » attend pendant un temps déterminé, ici 1 seconde, avant d’activer un moteur.
Le bloc « Boucle »
Le bloc « Boucle » permet d’effectuer une action un certain nombre de fois en fonction d’une condition.
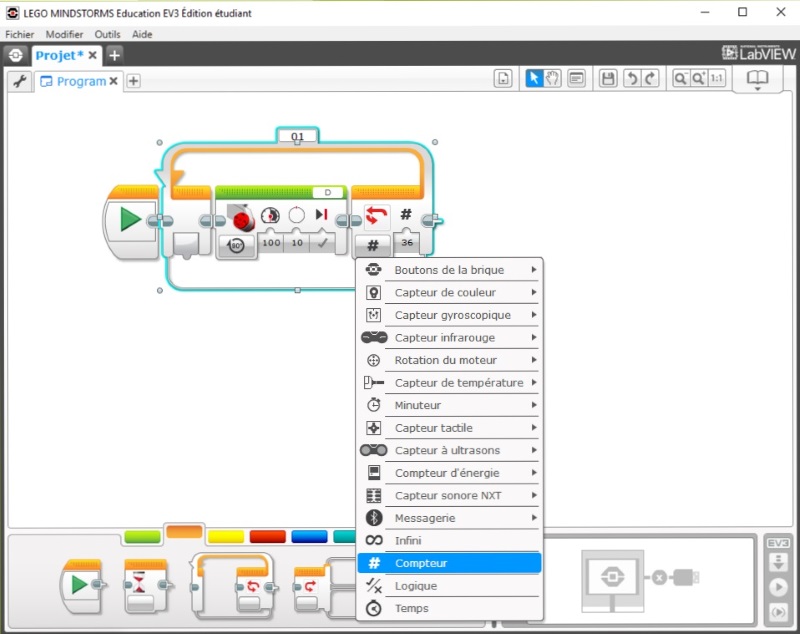
- Le bloc « Boucle » possède un nombre important de mode correspondant à toutes sortes de conditions pouvant être testées pour exécuter ou sertir de la boucle. Dans notre exemple, un moteur tourne de 10°, 36 fois, soit un tour complet.
Le bloc « Sélecteur »
Le bloc « Sélecteur » permet de tester une condition afin d’exécuter une séquence de programme ou de ne pas l’exécuter.
- Le bloc « Sélecteur » comporte un grand nombre de mode correspondant à toutes sortes d’états des capteurs, ainsi que toutes sortes de conditions. Dans notre exemple, nous utilisons le mode « Capteur tactile ». Si le bouton du capteur est enfoncé, nous activons un moteur, sinon nous désactivons ce moteur. Ici, nous testons 2 valeurs, mais ce bloc peut tester un nombre plus important de valeurs.

Les « Fils de données »
Les « Fils de données » permettent de passer des valeurs en sortie d’un bloc vers l’entrée d’un autre bloc.

- Jusqu’à maintenant, nous saisissions nos valeurs à la main, mais comme vous pouvez le voir dans cet exemple, l’intensité de la lumière perçue par le capteur est transférée par un fil jaune à l’entrée du paramètre puissance du bloc « Déplacement et direction », le tout étant contenu dans une boucle. Ainsi les moteurs iront plus ou moins vite si vous occultez le capteur avec votre main. Dans d’autres langages cela s’appelle « le passage de paramètres », notez la facilité et la lisibilité de cette opération dans le langage EV3-G.



comment fait on pour programmer la brique sans logiciel
Je l’ignore. Désolé.
Bonjour, tout d’abord, BRAVO pour ton site. C’est très bien fait. Pour répondre à la question, de pouvoir programmer la brique, SANS logiciel, il est possible de le faire avec une tablette
1- en te servant de GOOGLE,
2- en mettant entre parenthèses les 2 termes suivants:
A- « Lego mindstoms EV3 »
B- « Programmation sans logiciel «
3- dans ta requête à GOOGLE, séparé ces 2 termes par le mot anglais AND
SI tu as un problème copie une ou 2 lignes du texte suivant, directement sur le site de Lego.fr
TÉLÉCHARGEMENTS
APPLI EV3 PROGRAMMER (IOS/ANDROID)
Programme tes robots EV3 de la manière la plus rapide, la plus astucieuse et la plus amusante possible. Utilise l’appli pour construire et programmer ton robot directement sur tablette, sans câble ni logiciel supplémentaire.
Il y a une autre méthode, en programmant directement par ta brique. Mais… c’est drôlement plus compliqué sans le plan des différentes commandes. Oublie ça.