Développement du programme.
Bien que le petit circuit BOARDUINO se comporte globalement comme un module Arduino UNO, avec les mêmes possibilités matérielles et logicielles, il n’est pas prévu pour le développement d’un gros programme. Il m’a semblé au début plus « naturel » d’écrire et tester toutes les séquences avec un Arduino UNO. Quand le total a passé tous les tests et satisfait l’intégralité de nos désirs, on enlève l’ATmega328 de son support, on y place celui du PICOLAB. On y téléverse le programme complet. Il suffit de le réinsérer sur BOARDUINO pour se faire plaisir et placer l’appareil de nos rêves sur le plan de travail.
Sachant qu’un Arduino UNO va servir de banc de test pour développer l’intégralité du logiciel, il serait totalement aventureux de tirer des plans sur la comète, c’est à dire ne pas avoir au préalable entièrement assemblé et testé le matériel. Nous savons que les programmes vont dépendre entièrement de ce dernier. C’est la raison pour laquelle dès les débuts de cette naration nous allons aborder la réalisation « du hard ». Étant donné que les programmes fournis ont fait leurs preuves, il ne vous sera pas impératif de créer votre PICOLAB immédiatement, rien ne vous empêche de vous « amuser » avec un Arduino. Mais pour comprendre dans le détail l’aspect programmation, il me semble impératif d’avoir une vue d’ensemble du schéma électronique et des interconnections entre les différents modules. Donc, vous ne trouverez dans ces pages les développements logiciels qu’à partir d’ici.
Charger le « boot loader » sur l’A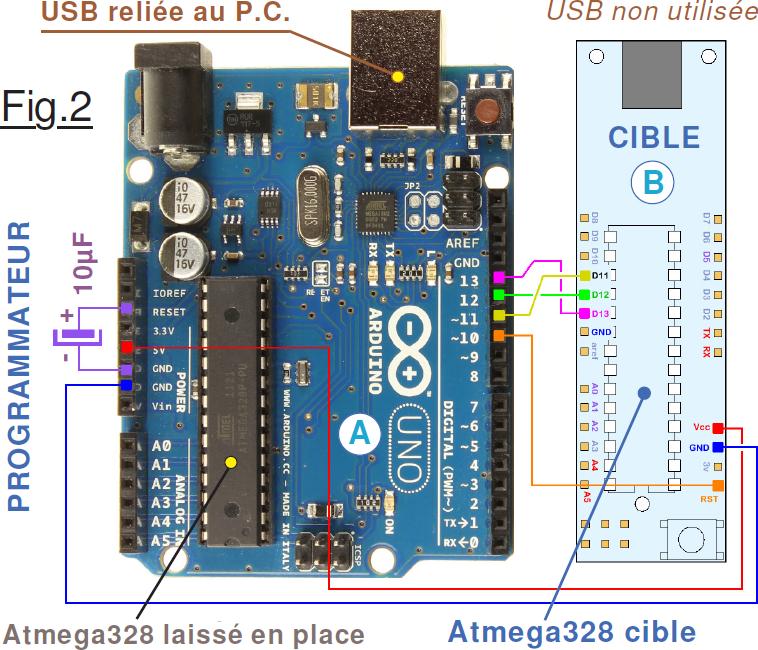 Tmega328.
Tmega328.
Difficulté initiale : Le microcontrôleur du module de la Fig.1 ne dispose pas du boot loader. Quand un fournisseur de circuit intégré développe un microprocesseur, il n’a aucune idée de la façon dont ses clients vont gérer leur environnement de développement. Chacun va avoir une démarche personnelle. Hors, quel que soit l’entreprise, il faudra faire passer le programme du système de développement dans la mémoire de programme du circuit intégré. Comme initialement il n’a aucune idée de ce qui sera fait par les clients, le fournisseur intègre dans son produit un « minimum vital » pour pourvoir dialoguer électriquement sur les broches, avec une procédure spécifique à chaque microcontrôleur. Ensuite, respectant ce protocole propre au circuit intégré « cible », chaque système d’exploitation agencera « sa confiture ». Les créateurs d’Arduino ont développé tout un système de programmation nommé IDE pour leurs petits modules. Mais ce système dialogue à sa façon. Il faut bien qu’entre le P.C. et l’ATmega328 il y ait un langage commun. C’est la raison pour laquelle, il faut à la première mise en service du microcontrôleur vierge y placer un tout petit programme assurant les échanges d’informations entre ce dernier et l’IDE. Ce « picoprogramme » ne doit consommer que très peu d’octets sur la cible, car il ne sert pas à l’application, mais uniquement au transfert de son programme. Ce tout petit programme initial n’est à loger qu’une fois pour toutes dans le microcontrôleur et se nomme « boot loader ». La façon d’écrire ce petit « dialogueur binaire » est décrite dans la FICHE nommée Charger un boot loader sur un ATmega328. Il suffit de suivre la procédure, sauf qu’ici la cible n’est pas un deuxième Arduino UNO mais le petit module de la Fig.1 qu’il convient de relier comme montré sur la Fig.2 ce qui impose d’avoir sur ce dernier soudé les divers connecteurs HE14.



{kind=link}