Merci des idées 
Mais si j'ai mis une poulie à l'envers, c'est juste parce qu'il y a les bordures pour empêcher la sortie de la courroie j'aurai l'air con sinon 
Les 4 grains en laiton ne font aucune marques, le frottement devrait être assez faible si mon calcul est juste (j'ai pris avec un poid de 3kg du robot) J'ai juste peur de l'usure, donc je les ai faits réglable en hauteur.
pour les épaisseurs c'est du 5mm pour le rouge et du 2mm pour le bleu.
Tout est tenu par vis sur la plaque de dessous, mais faut que je fasse des tests pour la rigidité du système (même malgrès les 4 entretoises, les moteurs et support) et si ça ne tient pas, je mettrais du 4mm de plaque bleue....
Et pour les "fixations", si tu parles des contraintes, je les laisses pas pour les screens, sinon on voit rien, mais autrement je vérifie en faisant un éclaté à chaque fois (et des fois ca marche pas...)
Voila deux trois photos pour mieux te répondre:
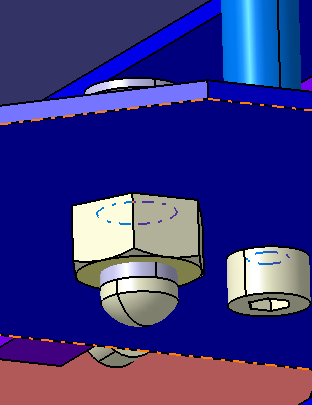 Voila les grains en laiton, il sont réglables en hauteur
Voila les grains en laiton, il sont réglables en hauteur
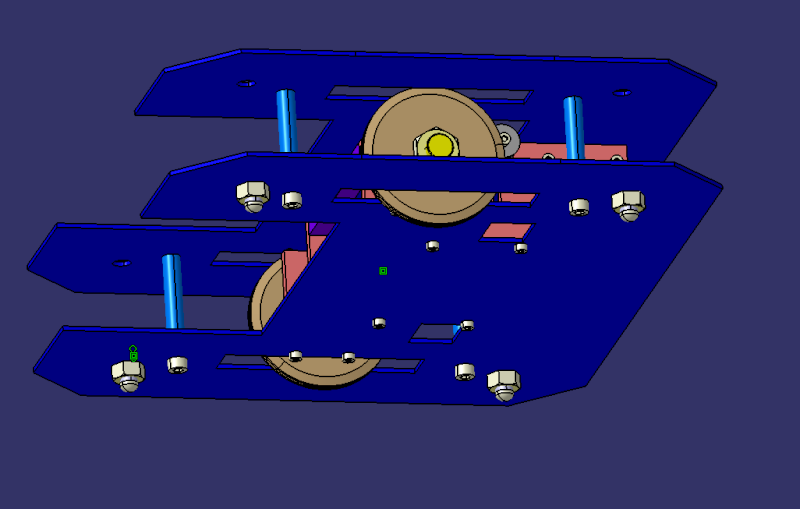 La tu peux voir les fixations de la transmission
La tu peux voir les fixations de la transmission
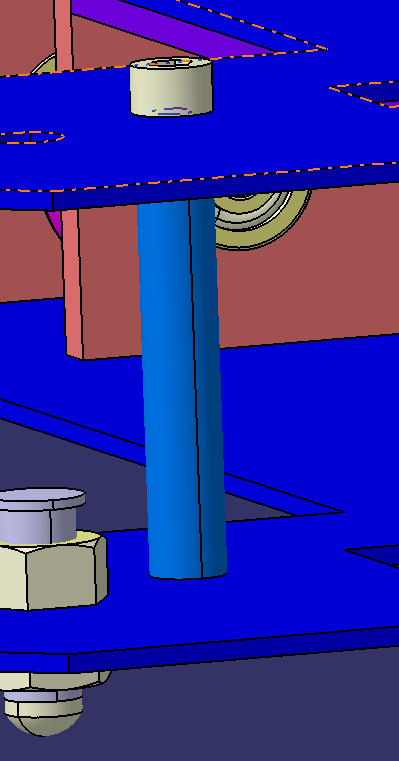 Et la c'est les entretoises entre les eux plaques du chassis
Et la c'est les entretoises entre les eux plaques du chassis
La théorie, c'est quand ça marche pas, mais on sait pourquoi.
La pratique, c'est quand ça marche, mais on sait pourquoi.
Quand la pratique rejoint la théorie, ça marche pas et on sait pas pourquoi






















