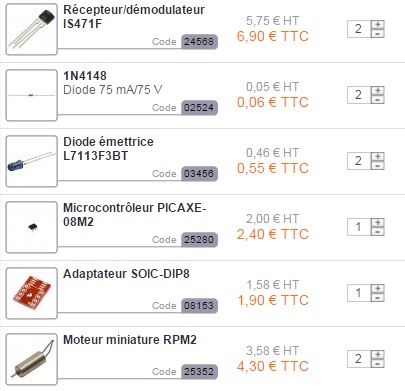
Pour l'IS471, ça signifie qu'il faudrait que je prenne une batterie plus forte du coup.
Enfin bon, ça ne me dérange pas d'en racheter une  .
.
Et du coup, si j'ai bien compris, l'IS471 ne demande pas à ce que la led IR soit programmé pour sa fréquence ?!
Cela signifie qu'il te faut alimenter ton montage avec du 4.5V minimum (3 piles de 1.5V).
En pratique la tension sera plus de 4.8V ou 5V. Vu que touts les composants de ce robot fonctionnent dans cette plage de tension, tu devrais pouvoir de passer d'une régulation de tension.
Par contre si tu utilise 2 cellules lipo en série (par exemple) qui fourniront donc 7.4V, tu devras réguler la tension à 5V sinon tu crameras au minimum le picaxe et les moteurs.
Ah oui, je n'avais pas pensé au branchement PC pour programmer le picaxe !
Est-ce qu'il est possible de brancher ça sur une breadboard, elle même branchée à un raspberry, pour programmer depuis celui-ci ?
Sinon s'il y a une solution simple pour windows ... ^^
Le picaxe n'a pas besoin d'un quelconque programmateur pour le programmer, suffit de le raccorder au pc! L'environnement de programmation pour picaxe est gratuit et fonctionne avec windows. Si tu as un port série sur ton pc pas de problème, sinon pas d'inquiètude ça fonctionne aussi avec un cable usb spécial (plus cher).
Pour les valeurs des résistances, il y a un tuto qui apprend à calculer ce qu'il faut ? :x
Oui, ça grouille sur internet.
La résistance de base sert à limiter le courant base - émetteur du transistor. C'est pour le protéger. Evidemment si la résistance est trop importante, le transistor de commande de ton moteur ne pourras pas commuter et le moteur ne tournera pas.
Pour le calculer il faut déjà connaître le courant de base nécessaire pour piloter le transistor qui doit fonctionner en commutation.
On a donc besoin de:
Le courant du collecteur (Ic). C'est le courant que va absorber ton moteur en marche. -> (200mA)
Le gain (hfe) du transistor ->(300)
ça donne un courant de base (Ib) de 0.2 / 300 = 0.7mA
Pour obtenir la rrésistance équivalente idéale on a besion de:
La tension base-emetteur (Vbe) -> 0.6V
La tension de commande en sortie du picaxe: si on l'alimente en 5v c'est 5v
Ce qui donne grâce à la loi d'ohm : (5V - 0.6V) / 0.7 mA = 6285Ω. Comme ceci est une résistance idéale et qu'on a à notre disposition des une résistance normalisée, on prendra donc une résistance de 6,8kΩ.
EDIT: pour les 2n2222, je trouve les 2n2222A et les 2n2222A-TO92 ?!
Tu peux prendre les 2n2222A-TO92, comme ils sont tous les 2 capables de piloter tes petits moteur autant prendre les moins encombrant.
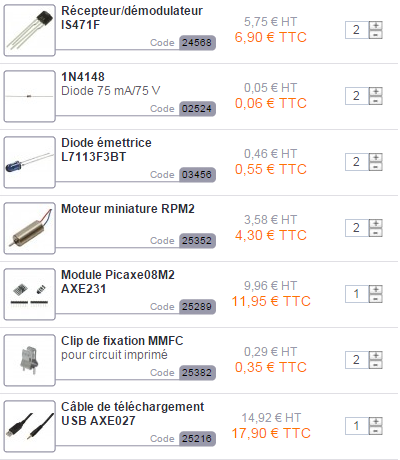
Pour le 08M2, ça ça va ?
http://www.gotronic....xe231-19480.htm
Oui. C'est en cms en plus donc ça gagne de la place... mais c'est pas marrant si tout est déjà fait  Rien ne t'empêche de le prendre quand même en guise de roue de secours. C'est toi qui voit avec ton budget.
Rien ne t'empêche de le prendre quand même en guise de roue de secours. C'est toi qui voit avec ton budget.
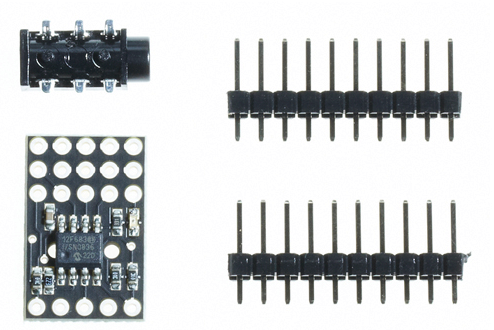
Il y a ça aussi: http://www.gotronic....xe021-11931.htm
Qui a l'air encore plus simple puisque le jack est déjà soudé, mais c'est plus gros aussi.
Petite remarque, si ton objectif est de faire le plus petit possible (je crois que c'est le cas) rien ne t'empêche de programmer ton picaxe sur une platine de ce genre (tu peux aussi la faire toi même il y a pas grand chose à souder... mais c'est vrai que pour 4€ pourquoi se priver) avant de le connecter sur ton robot. Tu gagnes la place du connecteur et des 2 résistances sur ton robot.







 .
.