Posté par
Posté par
Que signifie la variable linguistique "orientation" ? Pourquoi ne pas avoir directement la vitesse des roues (gauche et droite) ?
Le fait de mettre plus de variables linguistiques en entrée te permettra d'avoir plus de règles et donc d'affiner le calcul des sorties (même si c'est toujours une vitesse entre 0 et 1, la manière de calculer cette vitesse sera différente et (on peut l'espérer), plus adaptée). Le tout, c'est de savoir si les variables d'entrées ont une réelle influence sur la sortie ou non.
C'est un peu comme l'age du capitaine : c'est une info que tu as mais qui ne te sert pas à résoudre le problème. Si tu la prend en compte, tu complique le système sans rien changer au résultat
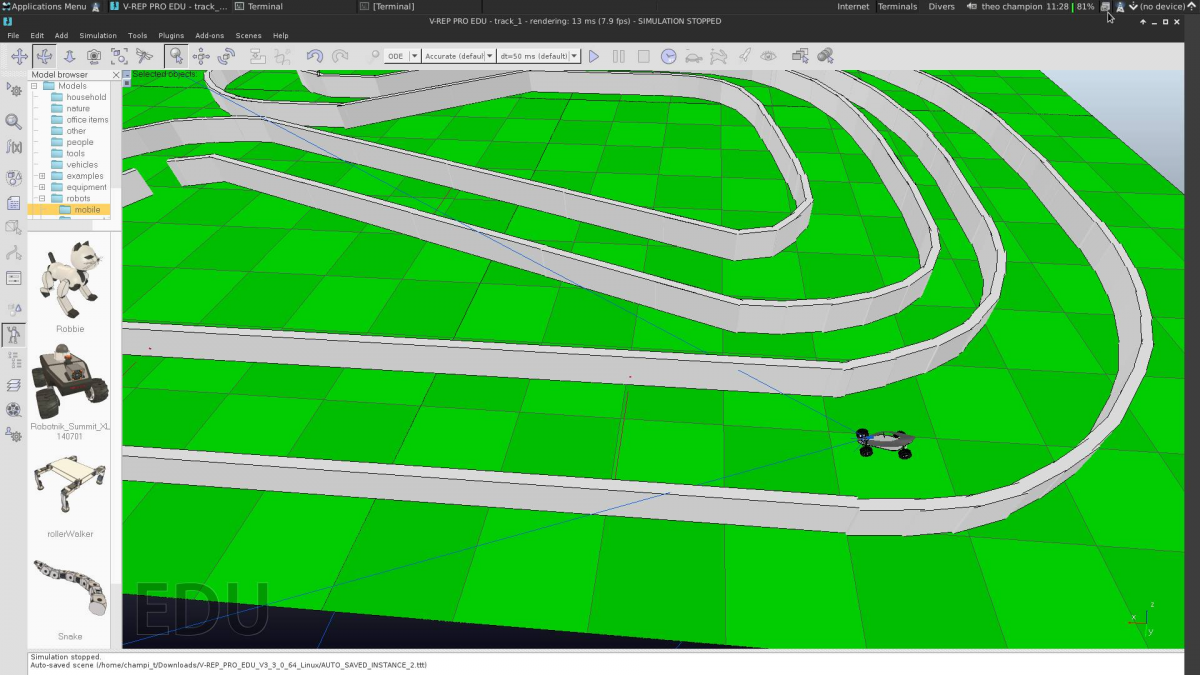
Mon robot est une base de voiture télécommandée, pour tourner je dois donc orienter les roues avant (comme quand on tourne le volant dans une vraie voiture) et non pas changer la vitesses des roues (d'ailleurs je n'ai qu'un seul moteur pour les deux roues arrières). Le contrôle de cet orientation se fait par l'envoi d'une valeur comprise entre -1 et 1, -1 étant roue tourné a fond vers la gauche 1 étant roues tourné ) fond vers la droite et 0 étant roues droites 
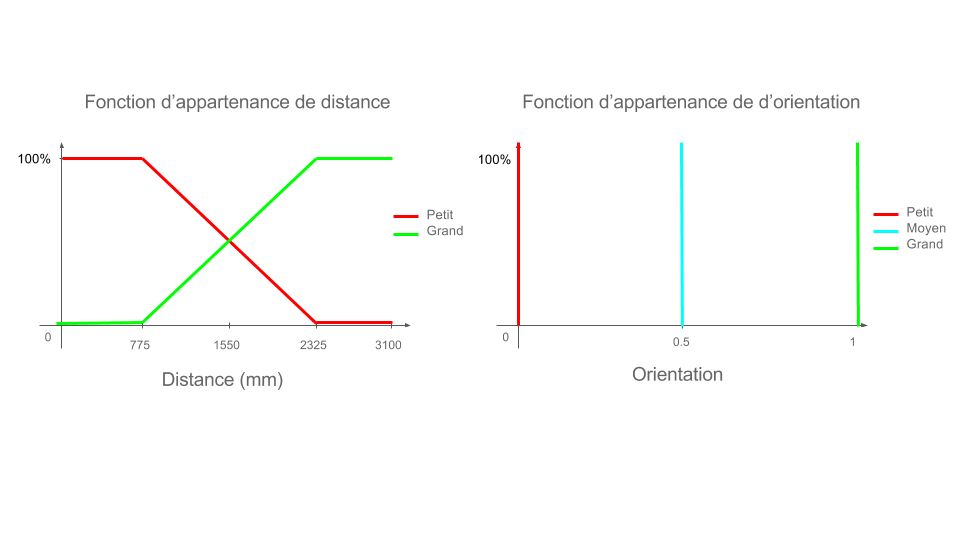
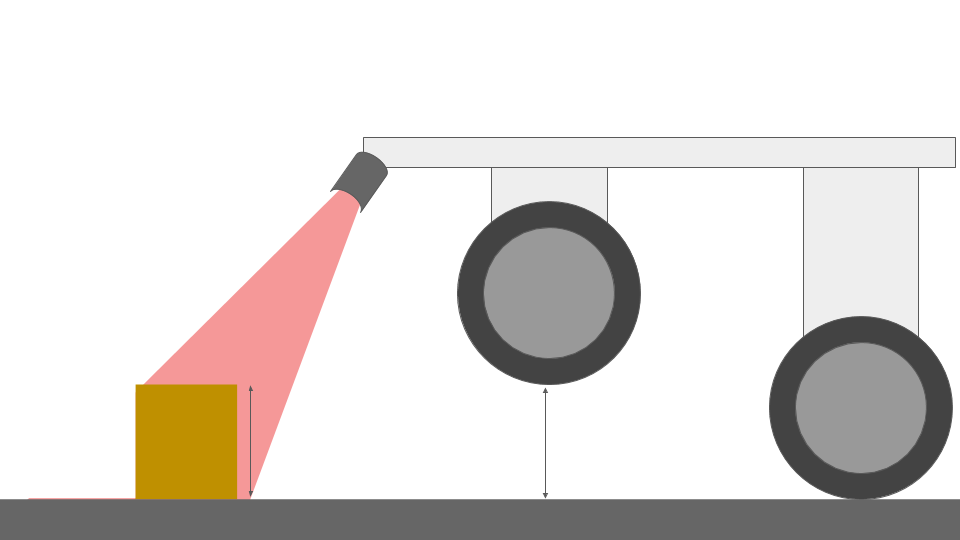
Je commence à comprendre mieux l’intérêt des variables linguistique, dans mon cas il faudrait donc que j'ai 3 variables linguistique pour la distance: petit pour la détection des bordures, moyen pour la détection des virages et grand pour la détection des grandes lignes droites à l'avant du robot 
 )
)