Posté par
Posté par
Salut,
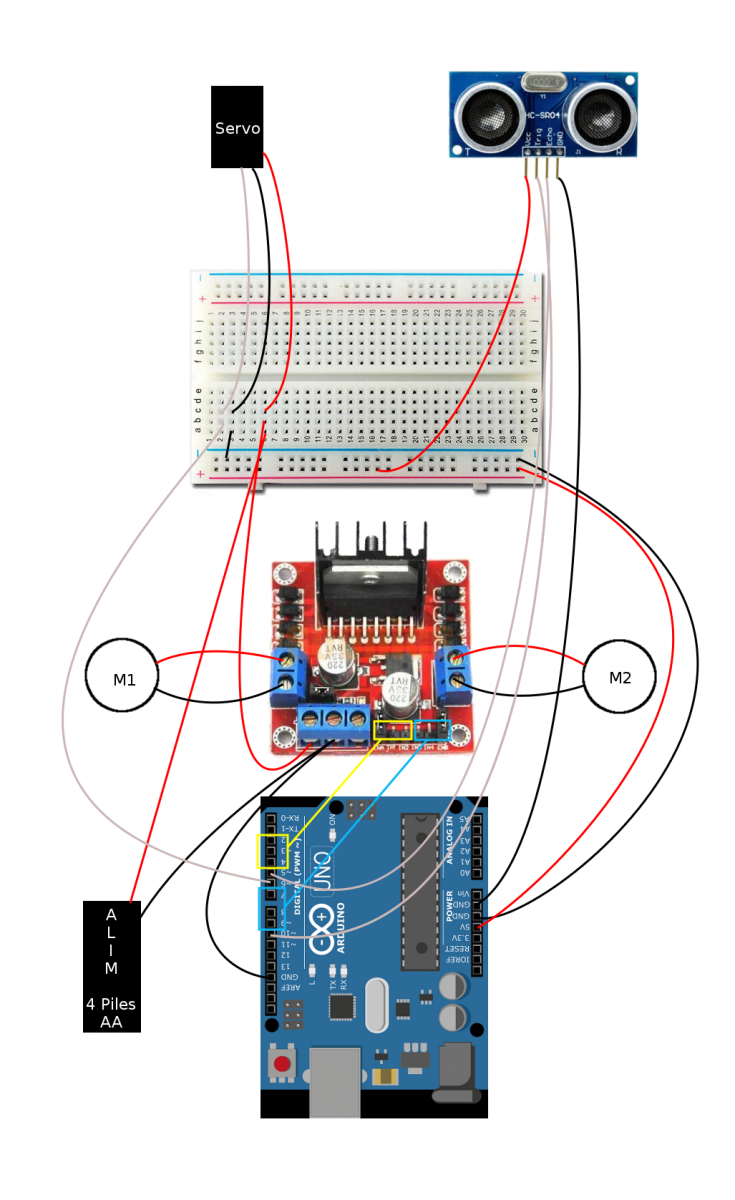
Après de nombreuses recherches et un post salvateur, il s'avère apparemment que le fait d'utiliser la librairie servo.h "condamne" les pin 9, 10 à fonctionner avec les servos sur une fréquence différente...
Il m'a donc suffit de changer la pin 9 (PWM moteur droit) à la pin 5 pour faire fonctionner les moteurs et le servo correctement.