Contenu de pmdd
Il y a 938 élément(s) pour pmdd (recherche limitée depuis 01-mai 13)
Par type de contenu
Voir pour ce membre
#120666 [Mars Attacks!] Participation à la coupe de france de Robotique 2024
 Posté par
sur aujourd'hui, 08:05
dans
Coupe de France de robotique / Eurobot
Posté par
sur aujourd'hui, 08:05
dans
Coupe de France de robotique / Eurobot
#120655 Au bistrot du coin ...
Posté par
sur 22 avril 2024 - 10:13
dans
Général
Pour les fans comme moi des roues mecanum...
https://youtu.be/nfn...?feature=shared
#120651 PID - un banc de test
Posté par
sur 21 avril 2024 - 11:08
dans
Programmation
Affiner les paramètres du PWM par potentiomètre, pourquoi pas, mais ça présente la difficulté de pouvoir reproduire le réglage.
Après, si tu veux faire du suivit de ligne ultra rapide (et pas juste rapide) avec des virages serrés (ie assez pour ne pas pouvoir les passer à vitesse max) avec une caméra pour anticiper la ligne, alors je ne suis pas sûr qu'un contrôleur PID soit le plus adapté. Des contrôleurs que je connais, celui qui me semblerait le plus adapté serait un contrôleur par modèle prédictif (ie un contrôleur qui "simule" la position à t+delta_t pour tous les paramètres possibles, et choisit la meilleure combinaison, ie le plus loin devant sans trop d'erreur par rapport à la ligne et à l'orientation de la ligne). NB : j'ai rapidement vu ça en cours, mais j'ai pas vraiment d'expérience dans ce type de controleur.
Mais je penses que déjà avec du PID, on peut faire de belles choses.
Exact, la reproduction du réglage est un inconvénient, mais pour la mise au point (pour affiner vs le comportement du robot en "réel" cela me semble plus facile
Pour ce qui est de la notion d'ultra-rapide, c'est relatif...je voulais dire ultra-rapide pour moi...
mais ce n'est qu'une piste que j'explore pour mon futur projet. Je suis attiré aussi par l'analyse d'image, mais je sais que ce sont les concours qui peuvent me booster.
#120649 PID - un banc de test
Posté par
sur 21 avril 2024 - 08:50
dans
Programmation
Bonjour à tous
je furète dans les coins à la recherche de mon projet projet. Dans les potentiels il y a un suiveur de ligne ultra rapide. A ce sujet là, concernant le PID (il y a peut-être déjà la réponse quelque part ici...) , et j'imagine que c'est possible, est-il donc possible et intéressant d'avoir des potentiomètres pour affiner, directement sur le robot , les différents paramètres du PID ?
Bon c'est une question préalable, avant que je me penche éventuellement dessus. J'ai des lointains souvenirs de mon projet de fin d'études d'ingé, le pilotage PID d'une pompe à chaleur... ça fait...40 ans 
#120644 [Mars Attacks!] Participation à la coupe de france de Robotique 2024
Posté par
sur 19 avril 2024 - 02:57
dans
Coupe de France de robotique / Eurobot
Bon toujours en retard, mais ça avance!
Eh oui la coupe de Belgique c'est ce week end.
Voici en avant première la première version de notre poster technique :poster 2024 Belgique.jpg
Le plus gros de la mécanique du robot principal est ok, même si il y a encore et toujours quelques points à revoir / améliorer

Techniquement certainement très au point et très réussi esthétiquement, ce qui compte pour moi...top le rouge et noir !
#120636 Naissance de mon Sumo
Posté par
sur 17 avril 2024 - 03:05
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour à tous !
Quelques nouvelles de mes champions à 15 jours du concours. Entrainement intensif de jour comme de nuit, avec des séances d'agilité avec un leurre et des poussées de poids avec une pile de livre de 3kg dont "Le python pour les nuls". C'est la seule façon de se préparer contre des champions , sur un match on ne sait jamais...
ou une erreur d'arbitrage... 
#120622 Caméra JeVois-A33
Posté par
sur 10 avril 2024 - 12:17
dans
Reventes, matériel d'occasion, récup
J'ai une caméra neuve Jevois 33 (achetée le 15/03/2023) jamais utilisée.
Mon achat sur un coup de tête, c'est avant que je décide de me lancer sur pico et non sur arduino.
Or tous les modules, codes ...sont faits pour l'arduino, et même si un expert pourrait la faire fonctionner sur Pico, ce n'est ni mon cas au niveau des compétences et de la motivation. C'est dommage elle m'a l'air top.
Donc je la brade éventuellement , je l'ai payée 79 $ (60 caméra + cables + micro sd +19 transport via US)
Si quelqu'un ici est intéressé...
#120589 Tournoi mini sumos en Isère
Posté par
sur 05 avril 2024 - 05:44
dans
Concours tournois et autres compétitions
Bonjour, une question sur le règlement qui n'est pas écrite explicitement mais je veux vérifier: si le sumo sort sont son adversaire et sort derrière lui (en le poussant par exemple), est-il déclaré vainqueur ou faut-il rester sur la piste ?
#120583 Tournoi mini sumos en Isère
Posté par
sur 04 avril 2024 - 08:40
dans
Concours tournois et autres compétitions
Merci également à vous de partager ici, j'espère que ça motivera pas mal de gens à venir concourir pour les prochains événements! Voir même à en développer dans différents coins de la france !
pmdd sera une star à "abattre"comme Oracid à la TRR
 ouai...
ouai...
Et petite déception de ne pas pouvoir aller à la TRR, ça m'aurait fait plaisir...
#120570 Capteur d'empreinte digital
Posté par
sur 02 avril 2024 - 05:55
dans
Autres projets inclassables
Bonjour,
Avez-vous l'expérience de ce type de capteur ?
https://www.waveshar...nt-sensor-d.htm
https://www.dfrobot....oduct-2051.html
Codes disponibles pour le micro-contrôleur Pico ?
Modes d'apprentissage ?
Fiabilité ?
Merci !
#120556 Naissance de mon Sumo
Posté par
sur 01 avril 2024 - 09:03
dans
Robots roulants, chars à chenilles et autres machines sur roues
La caméra HuskyLens Pro.
Gravity: HUSKYLENS PRO, an AI Machine Vision Sensor - DFRobot Wiki
SEN0336 | DFRobot HuckyLens Pro | RS (rs-online.com)
En suiveur de ligne, en détecteur de QR code, ou ce que tu voudras, je pense que cette caméra est tout à fait adapté au potentiel de ton imagination.
Intéressant
Compatible avec Pico ? parce que j'ai une caméra Jevois incompatible avec Pico à priori
Quel modèle 305 ? 336 ?
Je viens de découvrir DFrobot, une mine dor !
#120549 Naissance de mon Sumo
Posté par
sur 31 mars 2024 - 09:00
dans
Robots roulants, chars à chenilles et autres machines sur roues
Voilà on arrive vers la fin du projet , qui a été l'occasion pour moi de continuer à progresser après ma "sortie" récente de Mindstorms. je remercie ici @Gédé , que j'aurais le plaisir de rencontrer le 4 mai, de m'avoir donné cette belle idée, comme j'avais vraiment apprécié aussi les quadrupèdes d'Oracid (Dommage pour Toulouse cette année  !!!)
!!!)
j'ai trouvé passionnant de construire ces mini-sumos avec les contraintes sévères de poids et de dimension.
Je pense que mes robots ne sont pas réellement compétitifs, car pas assez compacts et surtout trop hauts. Cela vient essentiellement de la carte électronique, des capteurs et des connexions qui pourraient être rassemblés et optimisés sur une seule carte, ce que je refuse à faire à la fois par goût (je n'aime pas l'électronique !) et manque de compétence.
Et donc je me retrouve avec des robots trop hauts (problème de centre de gravité) et des capteurs trop hauts aussi (risque fort de rater les adversaires). Dans mes entrainements je combats des robots sensiblement similaires à la fois en construction et en programmation ce qui rend l'apprentissage insuffisant.
Mais je suis fier de ma famille quand même...ici au grand complet :

Progressivement je me suis amélioré et mis en place des principes de base, sachant que ma méthode habituelle est de découvrir tout moi-même (pas de tuto) et de faire appel ici sur Robot Maker en cas de blocage. Merci encore pour vos avis !
Voici un résumé de mon modeste retour d'expérience
- Je construis des "étages" à l'intérieur, au départ conçu un par un puis finalement dessiné en une seule fois, et je les imprime séparément. Je les assemble avec des pins Lego..c'est léger, performant et démontable.
- J'assemble le tout avec une carrosserie fixée par des écrous métallique insérés dans le bâti et des vis plastiques à l'extérieur. C'est solide, léger et démontable
- J'ai appris sur les conseils de Sandro et Mike à utiliser à un régulateur de tension pour alimenter tous mes capteurs ce qui m'a vraiment aidé.
- Je fabrique moi-même mes boitiers de batterie, sachant que je reste sur des batteries NiMh 18650 ce qui est sûr et pratique même si c'est encombrant.
- J'utilise le double Core du Pico pour la détection de ligne en multithreading, je ne sais pas si ça sert à quelque chose mais le principe est sympa.
- Je fabrique mes pneus en silicone, même si je ne suis pas encore au niveau de ceux de Jsumo sur les tailles standard, mais pour les autres c'est top, c'est le cas de mon premier champion qui a des pneus larges.
- Pour les connexions je suis passé par tous les états. J'ai commencé par souder directement sur ma carte (beurk) puis ensuite j'ai utilisé les câbles Dupont (trop rigides, trop longs), puis j'ai fini par fabriquer mes propres câbles avec un fil super souple et solide.
- Le seul point où je ne suis pas satisfait ce sont les capteurs de distance. La plupart sont conçus pour 5.5V ce qui les rend moins performants sous 3.3V. Ils sont aussi trop encombrants en général, sauf les Polulu mais qui coûtent cher, difficile d'en mettre 5 ou 6. Quant aux capteurs I2C, je n'ai pas réussi à cause d'une incompatibilité avec les commande de mes moteurs. On en avait discuté ici. Les capteurs sont un des points faibles de mes mini-sumos.
- Je n'ai pas utilisé les capteurs de ligne standard mais adapté celui-ci, encombrant certes, mais qui me permet de détecter la ligne 10 mm avant.
- Pour le reste je n'ai utilisé des servomoteurs que pour le premier de mes sumos, mais les moteurs à courant continu sont meilleurs pour cette utilisation, moins chers et performants. Ca ne sert pas à grand chose d'avoir une grande vitesse et leur taille conditionne leur poids, que ce soit ceux-ci ou les JSumo plus puissants mais plus gros.
- La position de la batterie est aussi un vrai problème, elle influe fortement sur l'équilibre du Sumo. A l'arrière c'est favorable pour ne pas sortir du Dohyo , mais défavorable pour le combat. Vers l'avant c'est le contraire...au dessus des roues le centre de gravité est un peu haut...bref pas de solution idéale.
Et pour terminer, un clin d'oeil à Oracid qui me disait que tout cela coûtait moins cher que les Lego mindstorms, ce qui est vrai dans l'absolu, mais les Legos je les démontais et là je garde tout ! j'ai 4 quadrupèdes et 6 sumos, je préfère ne pas calculer ma dépense globale !
Il s'agit maintenant pour moi de trouver un projet aussi prenant qu'ont été les quadrupèdes et les mini-sumos...pas facile, surtout que la compétition me stimule !
Pour la route une petite vidéo de TSUYOI, un de mes deux champions, qui a un comportement inattendu, mais sympa, il se relève tout seul !!!
#120538 Naissance de mon Sumo
Posté par
sur 30 mars 2024 - 05:08
dans
Robots roulants, chars à chenilles et autres machines sur roues
Un dicton pour toi: compétiteur un jour, compétiteur toujours!
Plus sérieusement, je rebondis sur ton commentaire sur les pneus: l'an dernier j'étais à Nîmes avec des pneus jsumo et mon robot avait plus d'adhérence avec des pneus déjà utilisés. Mais ils s'encrassaient rapidement et je les nettoyais régulièrement avec un chiffon microfibres.
La différence se faisait en allant rapidement vers la bordure: avec des pneus neufs il avait du mal à rester dans le dohyo. Idem avec des pneus encrassés. Des pneus "rodés" et propres fonctionnaient mieux.

Ben oui en fait j'aime la compétition, je suis un sportif et j'adore encore ça. Mais ce qui est appréciable surtout c'est la phase de préparation, c'est celle-ci où il faut prendre du plaisir, c'est 99% du temps d'un compétiteur. Et le jour J tout peut se jouer sur un coup de dé...
Ce que j'aime dans les mini-sumos, c'est justement l'avant, et j'en profite. Le jour de la compétition sera bref et encore plus bref pour moi qui suis un novice... mais là je me régale et me demande déjà quel sera mon prochain projet !
Voilà je viens d'achever TSUYOI II ! mon imprimante 3D a chauffé ! et je commence à être rodé de la conception au montage. Dans ce cas là le code ne change pas ce qui raccourcit aussi le timing.
Il est laid, le rapport de ses dimensions n'est pas esthétique, mais il est très bien fini, je suis en progrès de ce côté là.
Ca été difficile de rajouter une lame de 20 mm devant, ça m'a obligé à tout caser dans un espace réduit et surtout de mettre mes batteries perpendiculairement car elles ne passaient plus en longueur. Et du coup elles se retrouvent au-dessus des pneus donc au final le robot est plus haut aussi !
Mais le résultat est là...80% de victoires contre son challenger HAYAI contre 50% auparavant...
Comme il est plus haut et plus maigre il paraît moins puissant, ce qui est faux.
Donc il n'y a pas photo TSUYOI II sera mon deuxième robot participant !

#120527 Naissance de mon Sumo
Posté par
sur 27 mars 2024 - 06:12
dans
Robots roulants, chars à chenilles et autres machines sur roues
Rien à faire, Tsuyoi mon 5ème sumo, le plus puissant (et le plus coûteux !) n'est pas au niveau. Il a du mal à battre Hayai le 3ème et est même moins bon en combat frontal avec une puissance supérieure. C'est principalement à cause de sa forme cubique.
J'ai craqué , je vais le refaire complètement, le concours n'est plus très loin, il faut que je fournisse le nom et la photo des sumos engagés !
Je m'engage dans un challenge, en reconstruire un d'ici la fin du WE...
J'ai donc détruit Tsuyoi pour récupérer moteurs et capteurs mais pour rester positif , j'ai transformé ce massacre à ma sauce ... 
#120515 Tournoi mini sumos en Isère
Posté par
sur 24 mars 2024 - 07:31
dans
Concours tournois et autres compétitions
Bonsoir, autre question, les lames Jsumo qui sont en fait des lames de rasoir sont-elles permises pour le concours ?
#120514 Naissance de mon Sumo
Posté par
sur 24 mars 2024 - 07:30
dans
Robots roulants, chars à chenilles et autres machines sur roues
j'ai hâte de le voir combattre =)
Merci pour tous les compliments, c'est un beau robot, mais ce que je pressentais il est archi-nul en combat ! il ne peut rien contre les brutes épaisses, sa faible énergie en rotation se retourne contre lui et il est pitoyable !
Mais c'est ma plus belle réalisation !
Je ne connais toujours pas le nom des deux robots retenus pour le concours. J'ai travaillé sur les pneus et la stratégie pour les améliorer tour à tour, mais cela reste très serré. HAYOKU sera certainement du voyage grâce à sa pelle amovible qui le rend redoutable. Pour ce qui est du deuxième je ne sais pas encore. Si j'avais le temps je ferai un condensé des qualités des deux en un...
Lors des combats , la qualité des pneus s'avère prépondérante. Mes pneus silicone s'encrassent très vite, il faut les nettoyer à chaque combat, les pneus JSUMO se dégradent à toute vitesse et il faudrait les changer souvent, ce qui fait un sacré budget... En dynamique, lors des combats les pneus ne se comportent pas comme lors des mesures d'effort avec le dynamomètre. JSUMO reste devant mes pneus, sauf quand les miens sont très propres.
J'ai aussi travaillé sur la détection des lignes et bricolé un capteur IR, qui n'est pas fait pour cela d'origine, pour qu'il arrive à détecter la ligne 1 cm avant, ce qui n'est pas le cas des détecteurs de ligne classiques qui détectent la ligne à la verticale. Je ne sais pas si cela change grand chose.
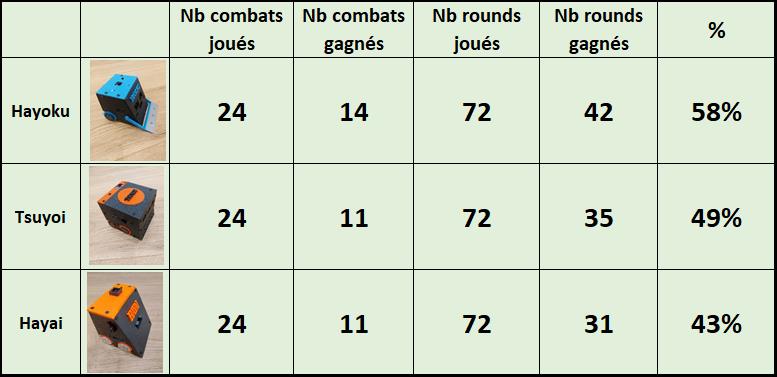
Voici le tableau cumulé des résultats.
#120502 Naissance de mon Sumo
Posté par
sur 22 mars 2024 - 10:50
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonsoir,
Voici la naissance du 6ème de la famille sumo (le dernier ?), TATSUMAKI (Ouragan), dont la spécificité est de sortir des bras et de tournoyer en présence d'un adversaire.
Bon probablement nul au combat, mais esthétiquement réussi et avec de nouveaux gadgets, dont la couronne de Led qui s'allume en bleu à la détection des lignes, en orange à la détection arrière et latérale de l'adversaire et rouge en détection frontale.
Il fait 99.5 mm de diamètre, 100 mm de hauteur et pèse 499.5 g ouf !
Pour l'instant il n' a pas encore combattu, il fait juste le show, une sorte de pom pom girl sumo... 



En bonus avec des effets sonores !!! 
#120501 Servo benchmark stress test
Posté par
sur 22 mars 2024 - 09:55
dans
Servomoteurs
Au début, les SG90 de Tower Pro faisaient n'importe quoi. Puis, ils suivaient la commande, puis ils chauffaient et enfin, s'arrêtaient.
Comme à mon habitude, avant de commencer un test, la batterie est chargée à 8.5V. Ce qui est beaucoup.
Pour le test, 15 minutes, à 8.5V, suffisent.
On ne peut pas incriminer Tower Pro. Sans doute que leurs servos ont une électronique de meilleure qualité, mais contraignante, alors que les génériques sont plus permissifs.
Bizarrement, les Tower Pro MG92B sont très tolérants, en tension. D'ailleurs, je conseille toujours ces servos.
Sur 4 servos (j'en ai besoin de 2), un ne marche pas du tout (?). Les 3 autres que j'ai alimentés en 8.2V ont fortement chauffé, mais je pense que le test que j'ai appliqué était très costaud. Au bout de 15 mn, j'ai arrêté, les servos étaient brûlants. Compte tenu que mon utilisation est beaucoup plus courte et plus légère je vais quand même essayer de les utiliser. Merci pour le tuyau.
#120499 Servo benchmark stress test
Posté par
sur 22 mars 2024 - 07:03
dans
Servomoteurs
J'ai fait tourner le servo pendant 2 heures. La tension a baissé à 7.6V. Le servo n'est pas chaud, du tout. Tout est bien.
Ton servo n'est pas générique, il a une marque. Il faut donc tester.
Voici un lien avec des SG90 génériques.
Merci Oracid pour ce test.
J'ai acheté ces servos parce que le délai est très court (2jours). J'ai déjà utilisé les servos de ton lien mais sans survoltage.
Comment se produit la défaillance ? Un échauffement progressif ? Une rupture ? Il faut que je teste combien de temps le servo avant de le monter ?
#120495 Servo benchmark stress test
Posté par
sur 21 mars 2024 - 07:33
dans
Servomoteurs
Le test est en cours.
Déjà, je peux dire que 2 servos Tower Pro ont très mal supporté le 8.5V.
Par contre les servos génériques, sans marque, tournent très bien.
Je vais laisser tourner pendant une heure.
J'ai ces servos là: https://www.amazon.f...ct_details&th=1
#120488 Servo benchmark stress test
Posté par
sur 21 mars 2024 - 07:36
dans
Servomoteurs
Bonjour
Sauf erreur de ma part, dans ce post là ou d'autres je n'ai pas vu l'info que je recherche : un servomoteur basique sg90 peut-il résister à l'application d'une tension de 8.2 V ? L'objectif n'est pas d'augmenter sa performance mais juste de le cabler dans un circuit alimenté en 8.2 V.
#120420 Tournoi mini sumos en Isère
Posté par
sur 09 mars 2024 - 11:43
dans
Concours tournois et autres compétitions
Nous avons eu les dernières inscriptions le 29 février, et le résultat est au delà de nos espérances: il y a au total 36 robots inscrits!
C'est un beau succès qui nous place parmi les rendez-vous robotique importants.
Et, cerise sur le gâteau, nous sommes très heureux d'avoir le soutien de Robot Maker!
Il y aura des niveaux très divers. Nous allons essayer d'organiser la compétition pour que les rencontres soient équilibrées et que chacun se fasse plaisir. Il y aura comme prévu des phases finales pour 2 niveaux, donc 2 podiums.
Rendez-vous le 4 mai pour vivre une belle journée d"échanges!
Si tu as un forfait n'hésite pas à me contacter pour un 3ème robot j'ai beaucoup de mal à les départager !!!
#120417 Naissance de mon Sumo
Posté par
sur 07 mars 2024 - 10:07
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonsoir
La suite, après cette frénésie de construction de sumos...
Bon j'en fais un 6ème , atypique et probablement pas compétitif, juste pour le fun, j'ai attrapé un virus... j'attends pour la fin du mois du matériel
En attendant il faut que je désigne mes deux champions qui vont faire le concours. Je n'ai pas d'expérience, difficile de s'étalonner. J'ai fait des combats en partant tête-bêche côte-à-côte (écart 10 cm) conformément au règlement, c'est sympa, mais petite remarque je trouve que les combats départ dos-dos sont plus longs et donc plus intéressants.
Ma méthode pour sélectionner mes deux champions :
* Un tour préliminaire pour désigner les 3 meilleurs: 8 combats de 3 rounds chacun dont on voit le classement ci-dessous et qui pour moi est une grosse surprise, HAYAI est devant HAYOKU et TSUYOI qui, malgré sa puissance, est 3ème. KIBIN et TAIRYOKU, qui sont les deux premiers sumos que j'ai construits, sont éliminés.
* Ensuite un travail d'amélioration (stratégie, code, équipement) des 2ème et 3ème pour que l'un des deux passe devant le premier. Si c'est le cas rebelote, nouveau travail d'amélioration , et j'itère jusqu'à ce que le classement n'évolue plus. A ce moment-là les deux premiers seront sélectionnés.

#120396 Tournoi mini sumos en Isère
Posté par
sur 03 mars 2024 - 04:03
dans
Concours tournois et autres compétitions
Bonjour
En fait je n'avais pas trop lu le règlement 
Juste une confirmation, il est écrit que les robots partent tête-bêche. On est d'accord que cela veut dire qu'ils se tournent le dos au départ (ce qui me semble le pertinent au niveau de l'intérêt du combat) ? ou pas ?
Le gabarit de départ fait quelle dimension ?
#120389 Naissance de mon Sumo
Posté par
sur 02 mars 2024 - 05:32
dans
Robots roulants, chars à chenilles et autres machines sur roues
Excellent boulot !
Merci Oracid
En tout cas c'est un job intéressant. Le travail d'optimisation rend complexe ce type de robot simple .
Je suis sur les pneus actuellement. J'ai fait des pneus qui opposent une force de 20 N mais malheureusement qui font rentrer le robot en vibration à cause de leur forme (très crénelé). Par comparaison mes autres robots opposent une force de 7N max
J'ai fait énormément de test et je suis arrivé à un optimum: pneus crénelés à l'arrière qui se déforment beaucoup (que j'ai fabriqués moi-même) et pneus lisses à l'avant très adhérents (achetés sur le site Jsumo). j'arrive à une force opposée de 16N sans mouvement parasite. les pneus crénelés à l'arrière permettent des démarrages sans soulever la roue avant; C'est nickel.
Après je déconnecte tous ces résultats de la performance éventuel au concours où des robots moins puissants, plus astucieux et plus agiles ne peuvent faire qu'une bouchée des miens, qui n'ont aucune expérience du combat.
Mais le job est passionnant.





