Posté par
Posté par
Merci
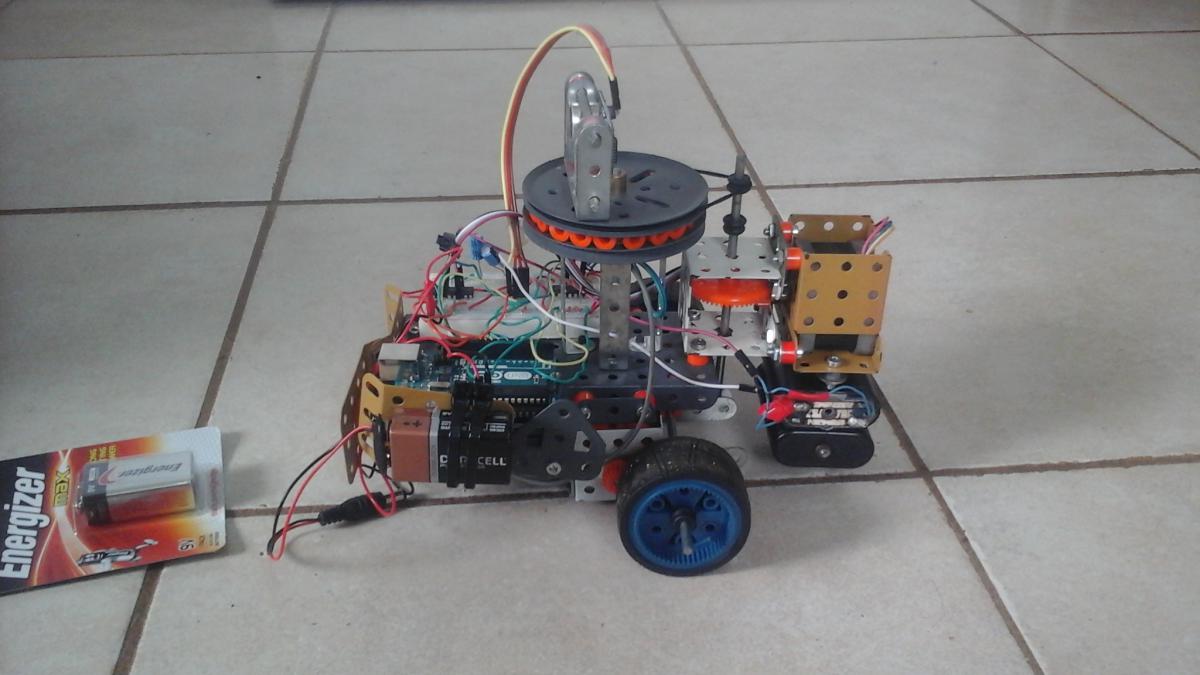
Normalement pour les photos la c'est bon.
après avoir ajouté les #define manquant et inverser le sens pour les fonctions reculer, et tout le reste du code marchera ... car les fonctions d'adaptation seront remplacée! Et ainsi pas de changement de nom de fonction ou de fonctionnement
Je pense pas faire avec les #define je suis pas encore assez habitué et je vais simplement refaire les fonctions reculer,avancer tourner ... a ma sauce en fonction aussi du L293D sa me permettra de mieux comprendre mon code aux lieu de faire un bête copier coller.
Par contre pour l'impression j'ai vraiment fait attention de mettre tous mon schéma a l'échelle c'est pour cela que sa ma autant surpris .
Après j'ai pris ton code car il me paraissait vraiment complet et le comprennait facilement .
En attendant l'avis des un ou le passage des autres je retourne essayer de comprendre le PID en version linéaire et angulaire où la c'est le gros trou....
Sur ce bonne nuit ou journée 



 ) mais trop pas trop le temps je voulais avoir assez vite mon chassie donc j'ai passé le fichier 3D au format PDF et je l'ai imprimer pour après le calquer au pointeau sur ma plaque .
) mais trop pas trop le temps je voulais avoir assez vite mon chassie donc j'ai passé le fichier 3D au format PDF et je l'ai imprimer pour après le calquer au pointeau sur ma plaque . :
:
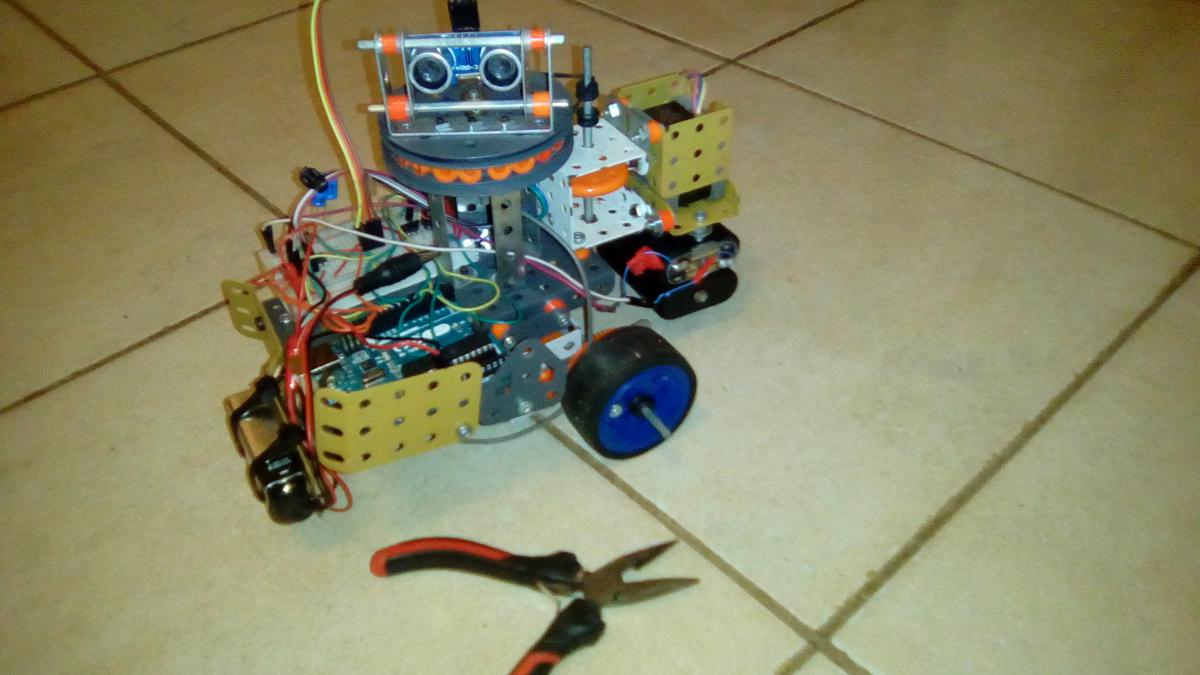
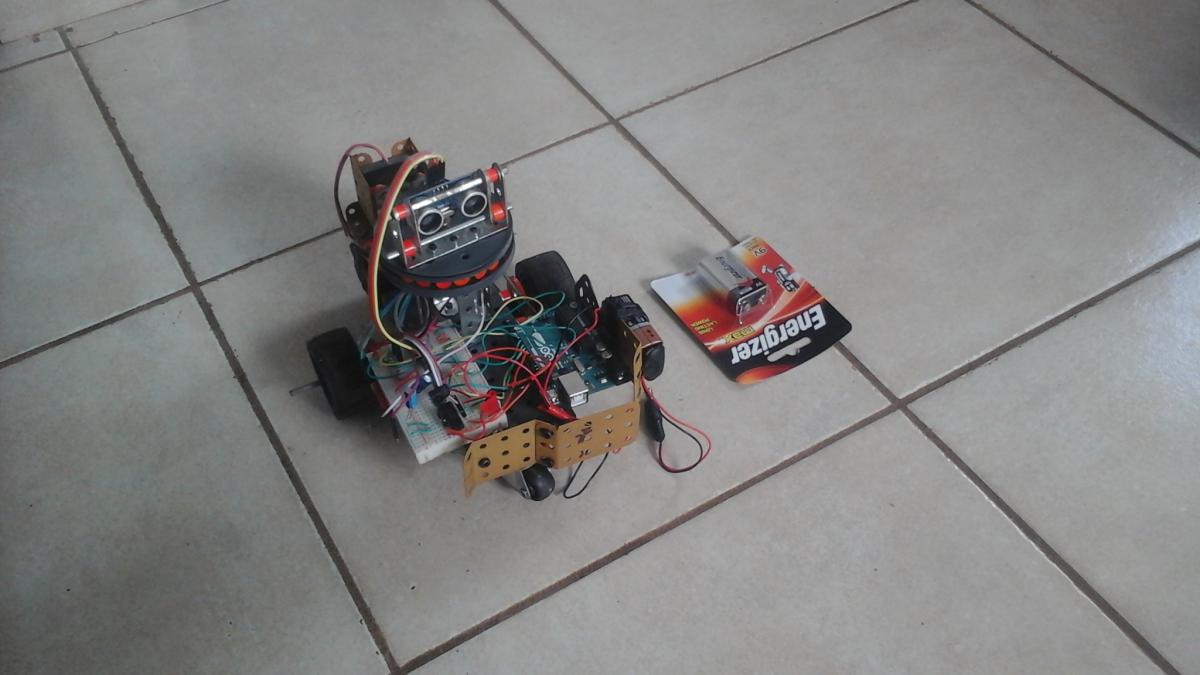
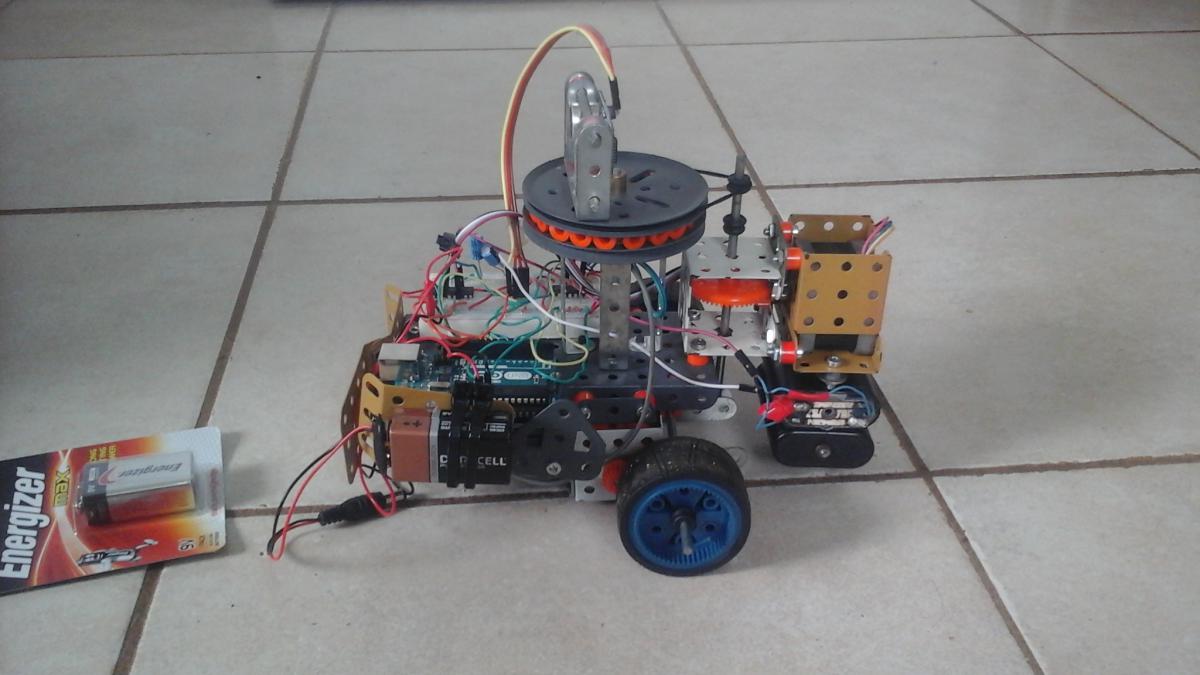
 , il est facile d'adapter une Arduino et même un capteur Ultrason .
, il est facile d'adapter une Arduino et même un capteur Ultrason .


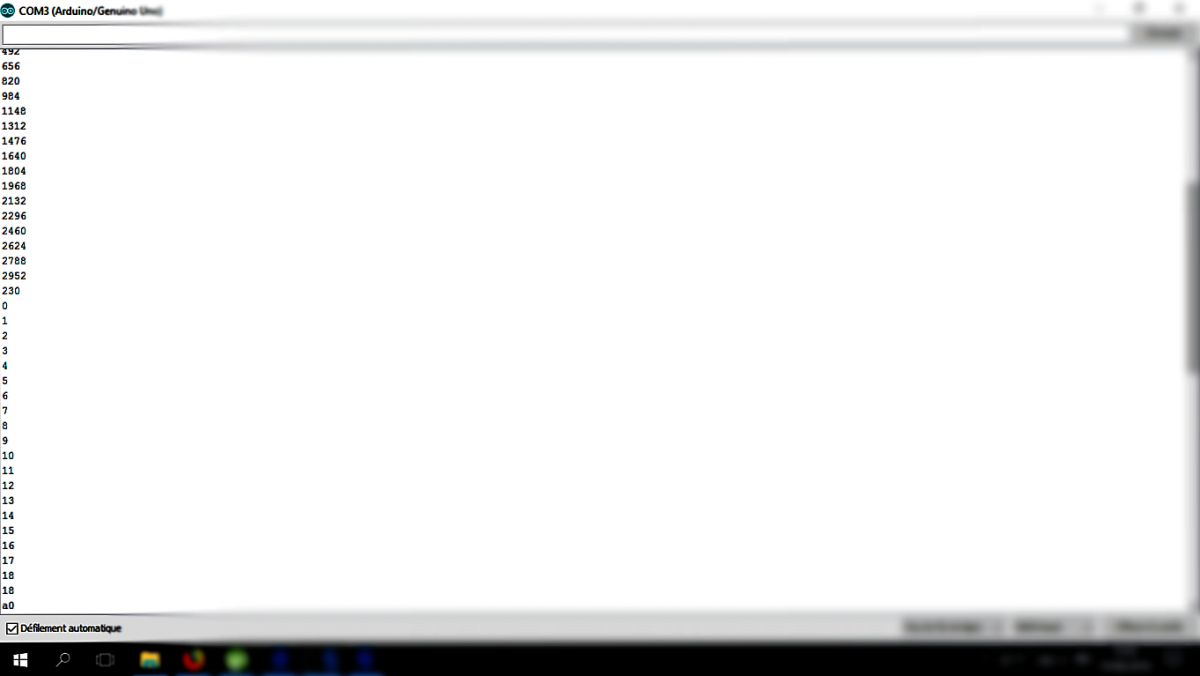
 vue que je n'ai rien réussi a bouger mais j'ai plein de question maintenant:
vue que je n'ai rien réussi a bouger mais j'ai plein de question maintenant: