Posté par
Posté par
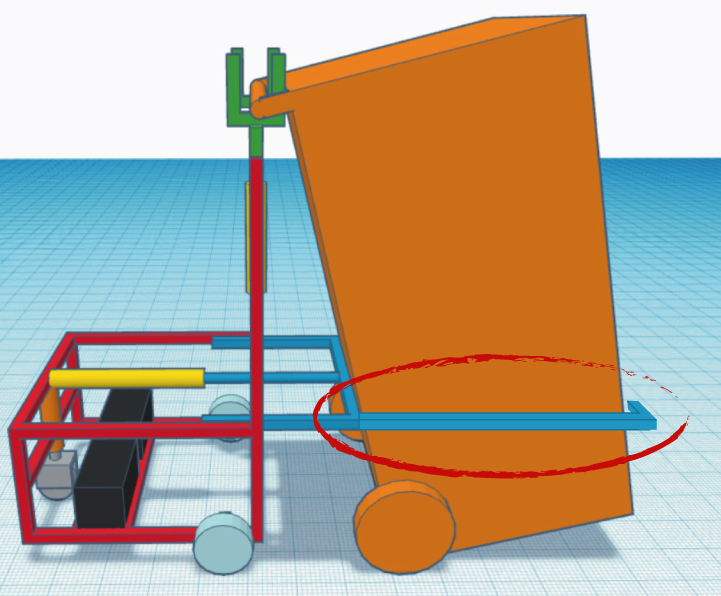
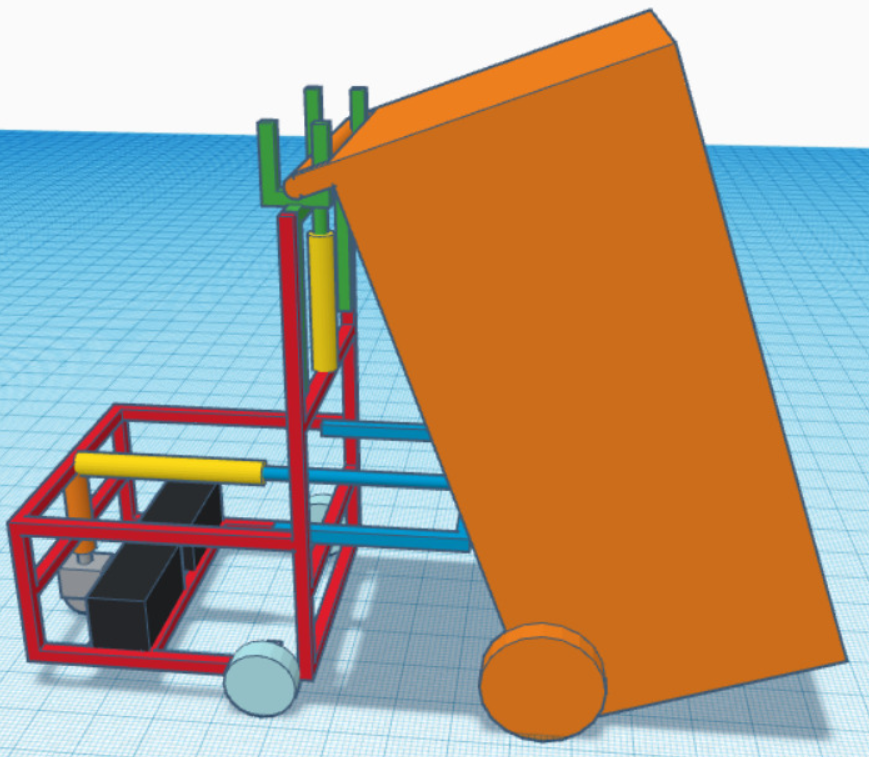
Personnellement je ferais en sorte d'ajouter un degré de liberté " flexible" pour l'angle d'orientation de la partie qui tient les poubelles par rapport au corps du robot.
Au repas, le support pour la poignée des poubelles serait bien " parallèle " à l'axe des roues, mais lorsque le robot tire le poubelle, et qu'il tourne, la "flexibilité" sur ce support permettrait de faciliter les rotations sans détériorer la poubelle ...
Je vois la poubelle comme une " remorque " au cul du robot... Et une remorque ne doit pas rester à orientation fixe par rapport au corps de la voiture ( du moins dans les virages ) =)
EDIT : En regardant le lien donné par levend je devine que cette spécification est bien incluse dans le produit. Présence d'un axe de pivot …
oui tu as raison, un axe de rotation vertical pour permettre les "virages", maintenant à voir pour la liberté "horizontale".