Posté par
Posté par
Et exit LabView.
Ça confirme la portée plutôt pour des enfants.
Après à voir, il y a certainement du bon.
Mais le fait que les anciens systèmes (capteurs, moteurs) ne seront pas compatibles, ça condamne l'existant et ça c'est vraiment dommage... Le problème des systèmes propriétaires...
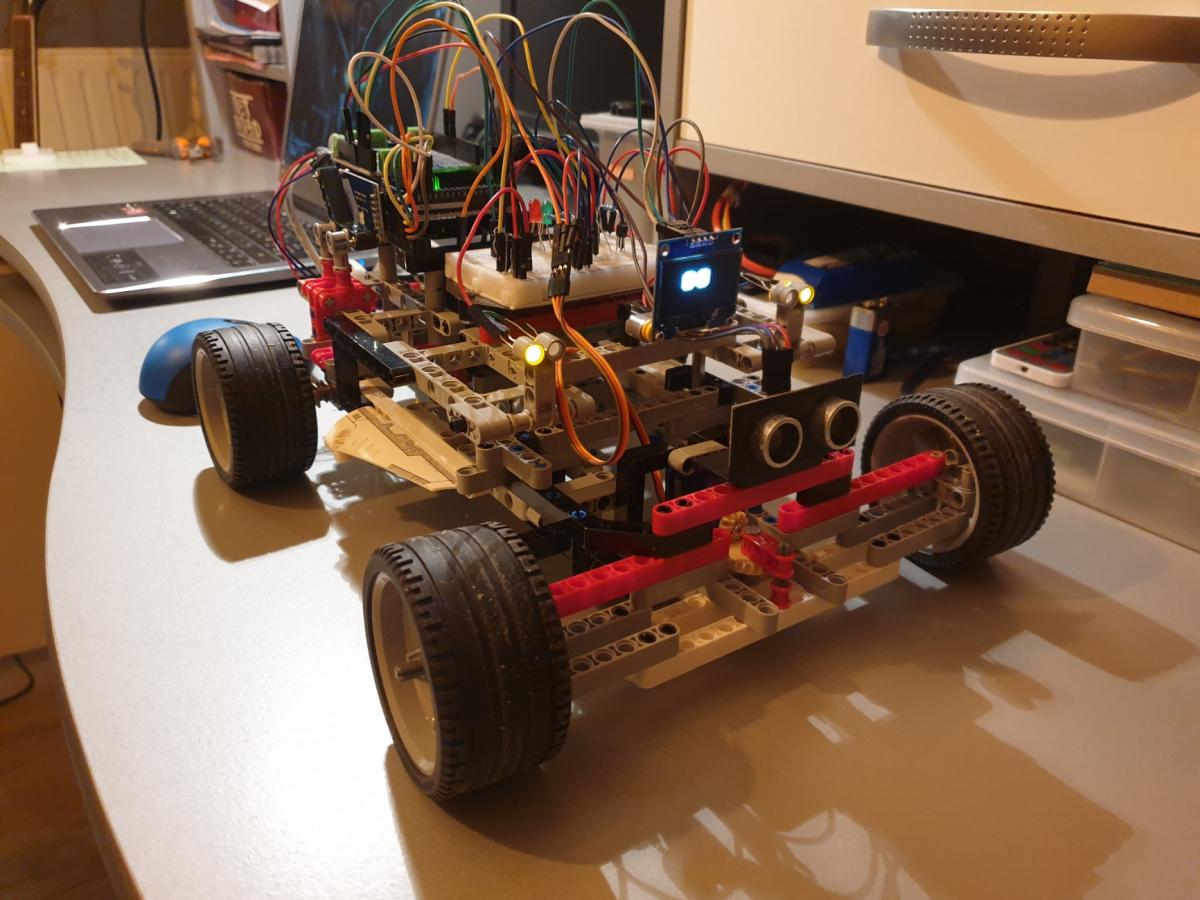
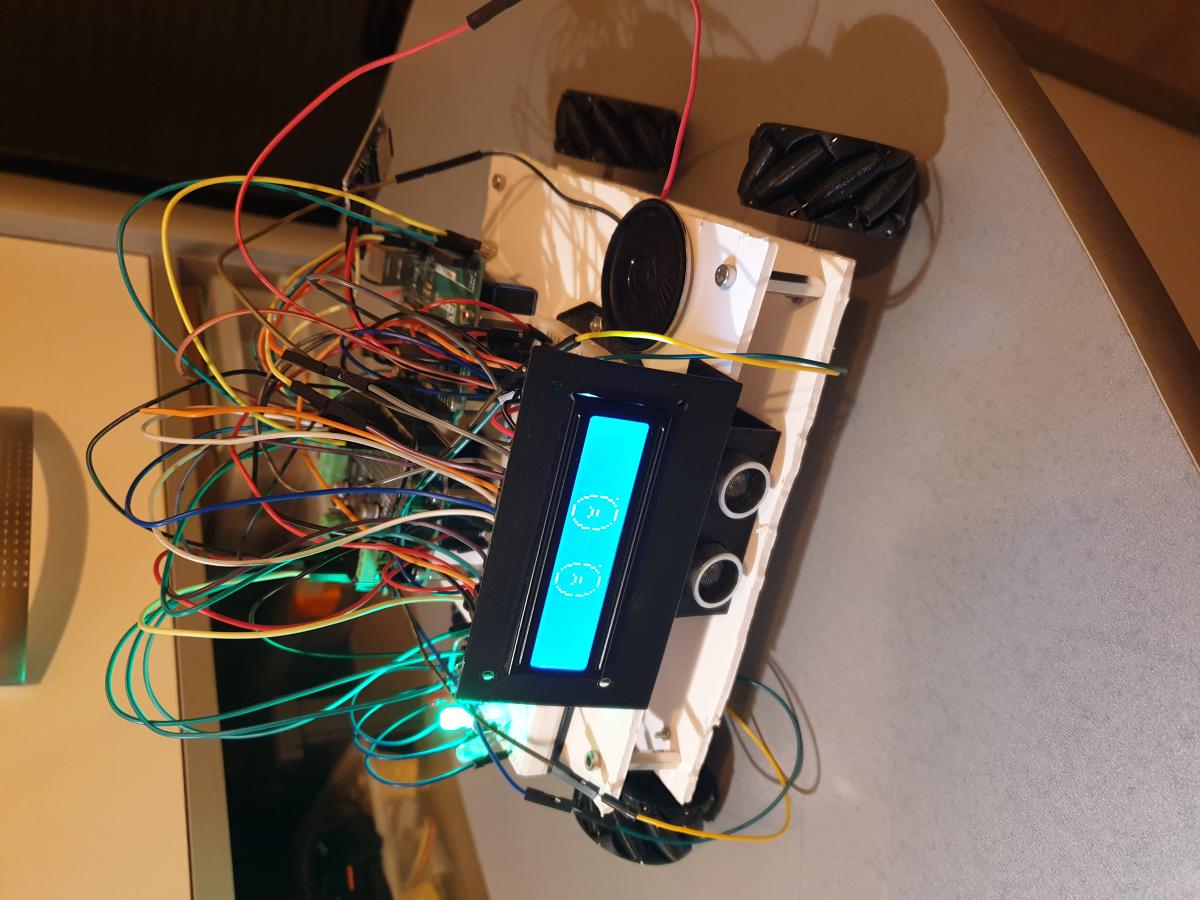
 et je suis satisfait du résultat obtenu, ce qui me donne une bonne base pour continuer. Je pense faire évoluer le projet pour le rendre plus autonome et je souhaite le doter d'une pince. Je retravaillerai le design également, ça ne ressemble pas à grand chose pour l'instant
et je suis satisfait du résultat obtenu, ce qui me donne une bonne base pour continuer. Je pense faire évoluer le projet pour le rendre plus autonome et je souhaite le doter d'une pince. Je retravaillerai le design également, ça ne ressemble pas à grand chose pour l'instant  , mais ce n'était pas le but... Je laisserai de côté pour cette seconde phase le son et les yeux qui restent gadgets.
, mais ce n'était pas le but... Je laisserai de côté pour cette seconde phase le son et les yeux qui restent gadgets.